
风电塔筒维护机器人.pdf

是你****韵呀

1/10
2/10

3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

风电塔筒维护机器人.pdf
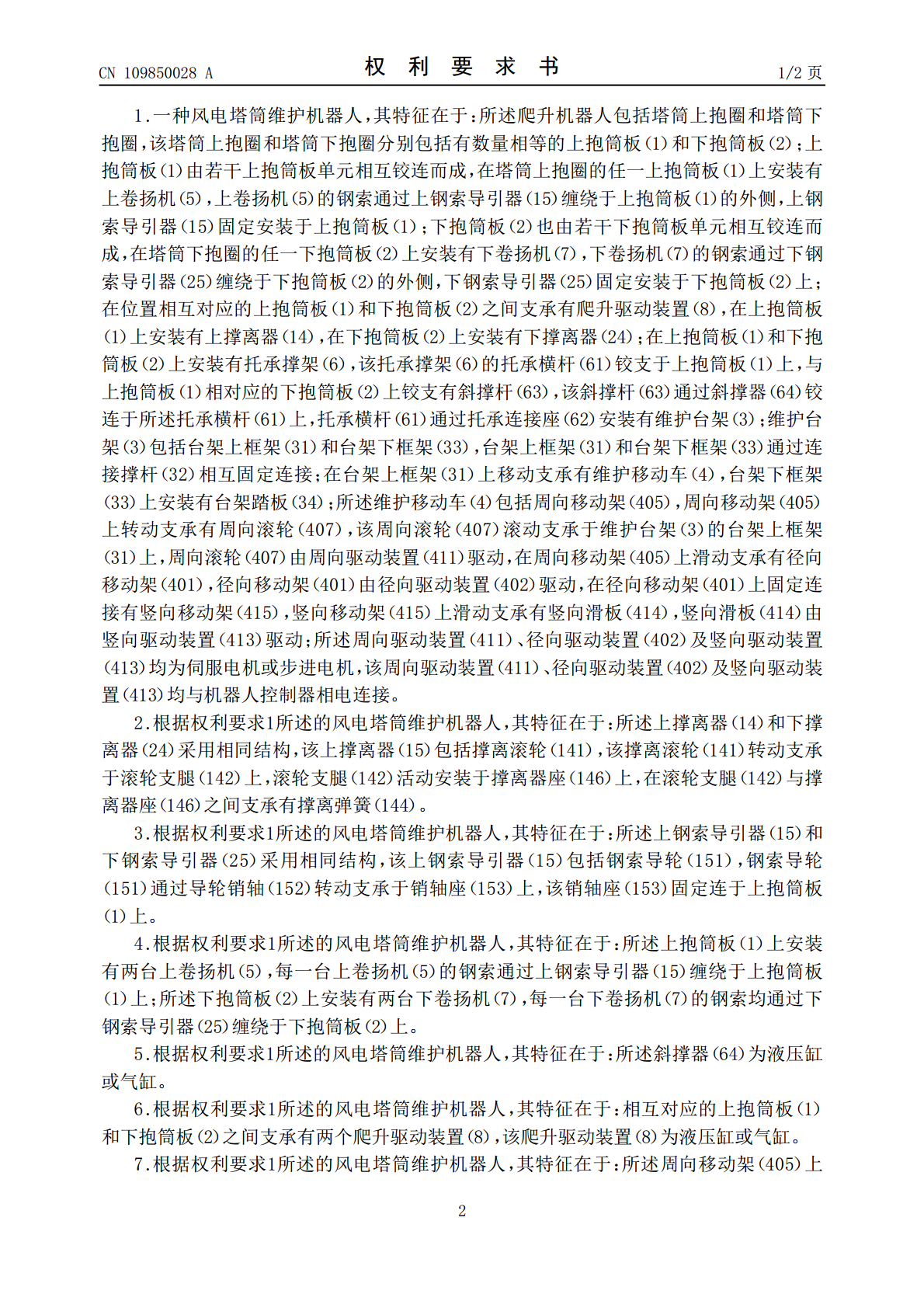
本发明公开了一种风电塔筒维护机器人,该爬升机器人的塔筒上抱圈和塔筒下抱圈分别包括有数量相等的上抱筒板和下抱筒板;在抱筒板上安装有卷扬机,卷扬机的钢索缠绕于抱筒板的外侧;在上抱筒板和下抱筒板之间支承有爬升驱动装置,在上抱筒板和下抱筒板上安装有托承撑架,该托承撑架的托承横杆安装有维护台架;维护台架的台架上框架上移动支承有维护移动车,维护移动车的周向移动架上转动支承有周向滚轮,在周向移动架上滑动支承有径向移动架,在径向移动架上固定连接有竖向移动架,竖向移动架上滑动支承有竖向滑板;该周向、径向和竖向驱动装置均与机
塔筒段、塔筒以及风电塔.pdf
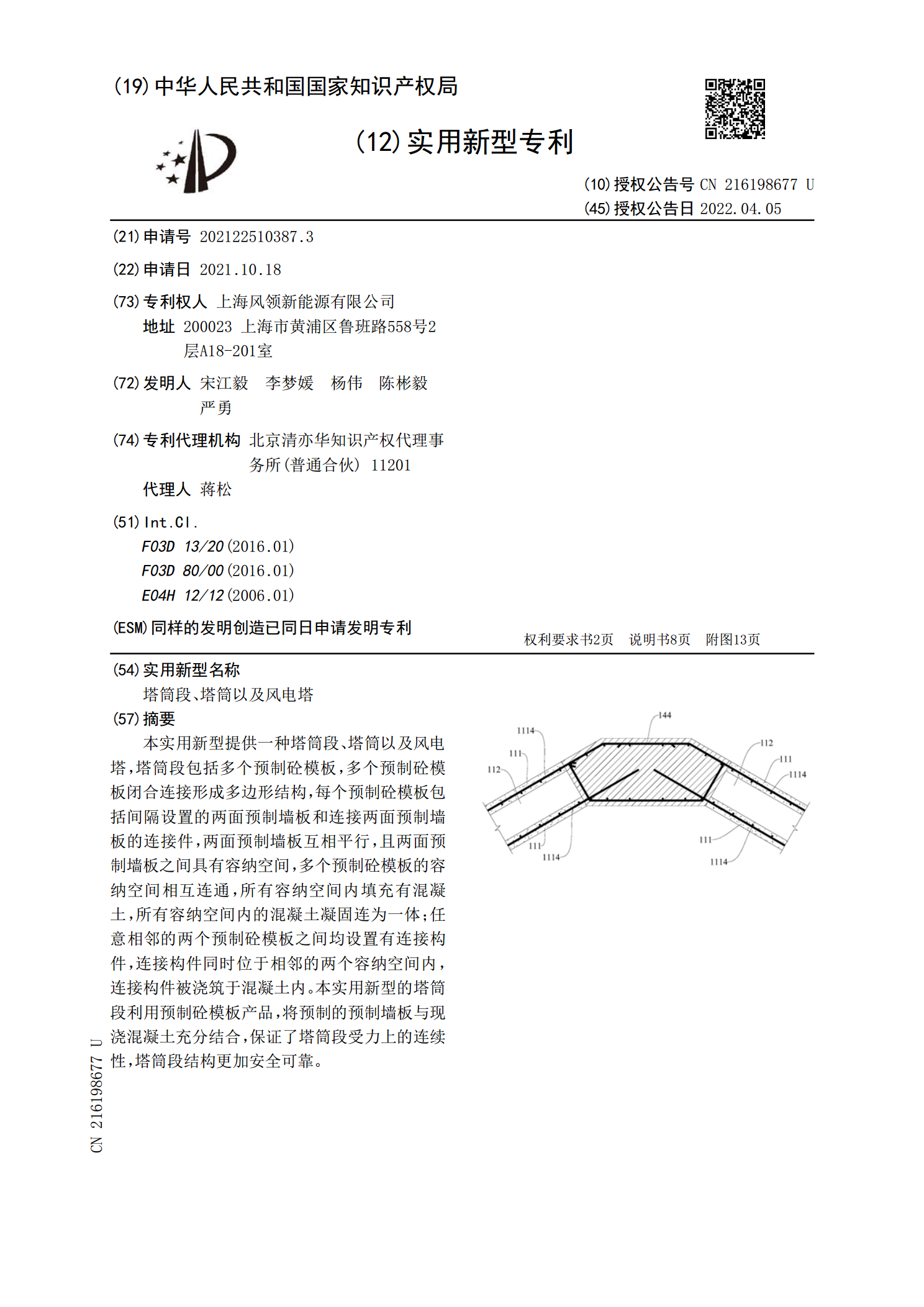
本实用新型提供一种塔筒段、塔筒以及风电塔,塔筒段包括多个预制砼模板,多个预制砼模板闭合连接形成多边形结构,每个预制砼模板包括间隔设置的两面预制墙板和连接两面预制墙板的连接件,两面预制墙板互相平行,且两面预制墙板之间具有容纳空间,多个预制砼模板的容纳空间相互连通,所有容纳空间内填充有混凝土,所有容纳空间内的混凝土凝固连为一体;任意相邻的两个预制砼模板之间均设置有连接构件,连接构件同时位于相邻的两个容纳空间内,连接构件被浇筑于混凝土内。本实用新型的塔筒段利用预制砼模板产品,将预制的预制墙板与现浇混凝土充分结合
塔筒段、塔筒以及风电塔.pdf
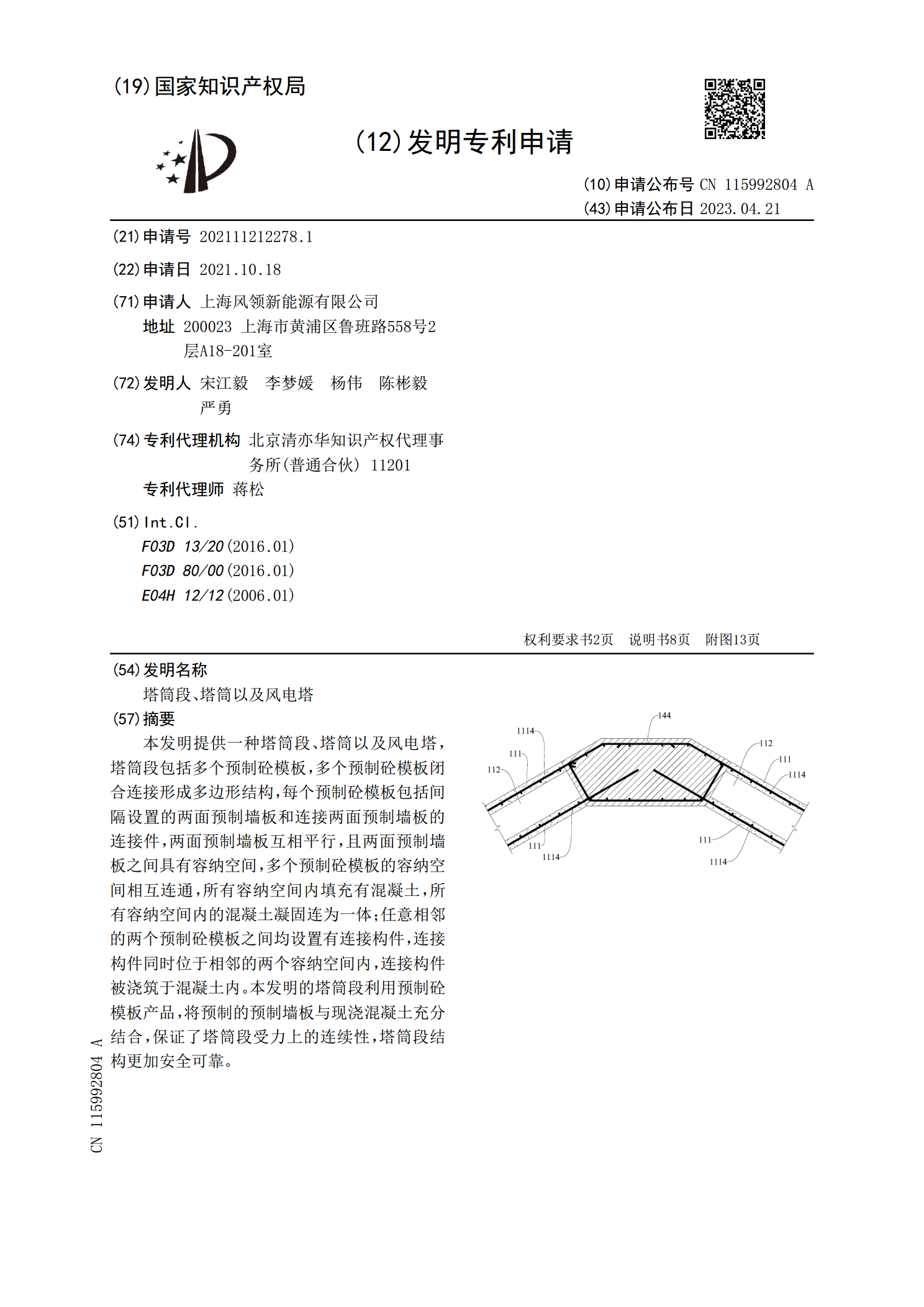
本发明提供一种塔筒段、塔筒以及风电塔,塔筒段包括多个预制砼模板,多个预制砼模板闭合连接形成多边形结构,每个预制砼模板包括间隔设置的两面预制墙板和连接两面预制墙板的连接件,两面预制墙板互相平行,且两面预制墙板之间具有容纳空间,多个预制砼模板的容纳空间相互连通,所有容纳空间内填充有混凝土,所有容纳空间内的混凝土凝固连为一体;任意相邻的两个预制砼模板之间均设置有连接构件,连接构件同时位于相邻的两个容纳空间内,连接构件被浇筑于混凝土内。本发明的塔筒段利用预制砼模板产品,将预制的预制墙板与现浇混凝土充分结合,保证了

风电塔筒.pdf
本发明提供一种风电塔筒,涉及风电设备技术领域,包括塔筒组件和连接组件;所述塔筒组件包括第一预制件和第二预制件;沿所述塔筒组件的周向,所述第一预制件和所述第二预制件依次设置;连接器设置在所述空腔内,所述连接器的一端与所述第一预埋件通过紧固件连接,所述连接器的另一端与所述第二预埋件通过紧固件连接。塔筒组件运输至施工现场后,需要将第一预制件和第二预制件拼接形成风电塔筒时,将连接器放置在空腔内,再将连接器的两端分别与第一预埋件和第二预埋件连接,即可将第一预制件和第二预制件连接成为一个整体,避免了湿式连接中预留钢筋
风电塔筒、风电塔筒的基础及其施工工艺.pdf
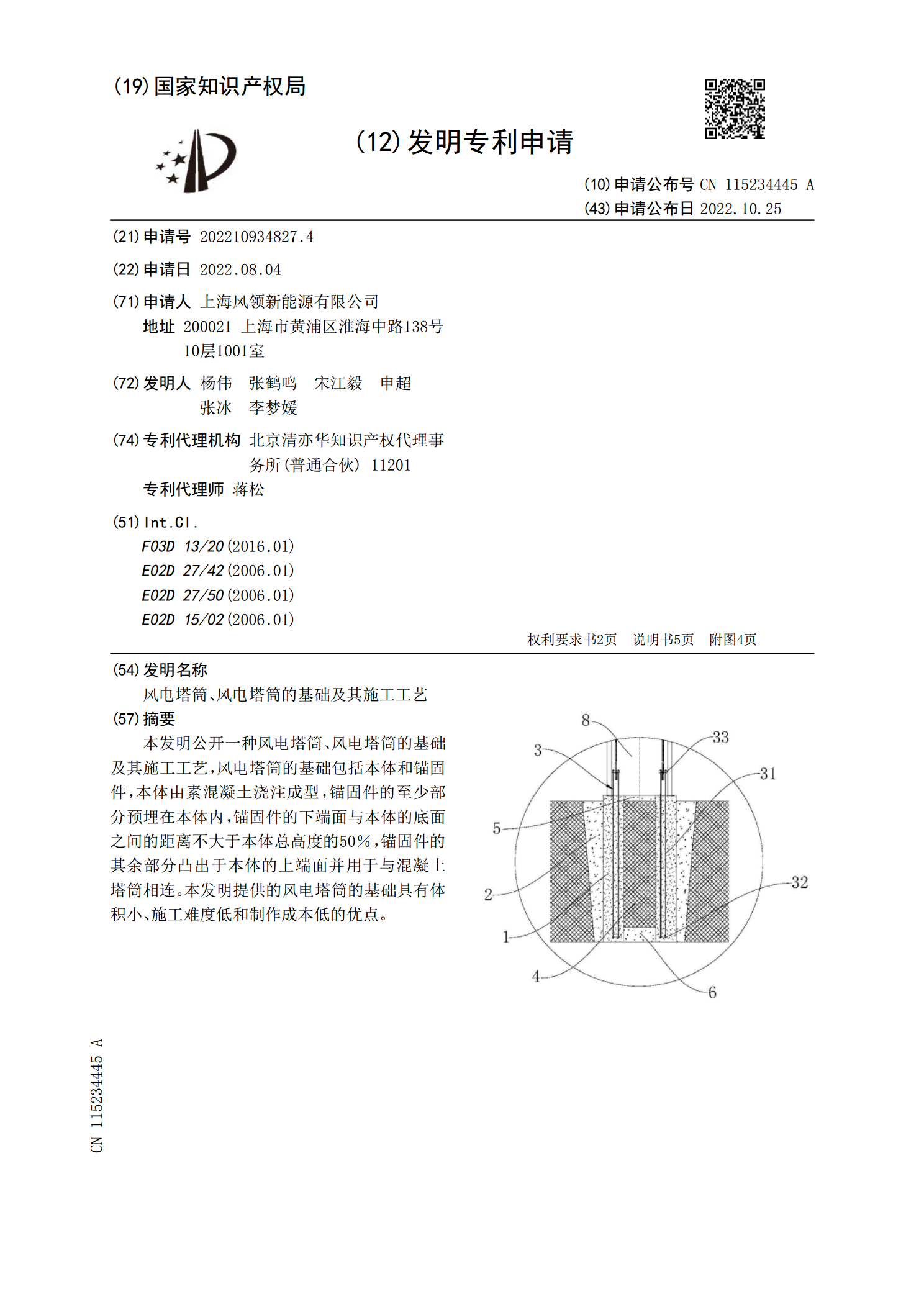
本发明公开一种风电塔筒、风电塔筒的基础及其施工工艺,风电塔筒的基础包括本体和锚固件,本体由素混凝土浇注成型,锚固件的至少部分预埋在本体内,锚固件的下端面与本体的底面之间的距离不大于本体总高度的50%,锚固件的其余部分凸出于本体的上端面并用于与混凝土塔筒相连。本发明提供的风电塔筒的基础具有体积小、施工难度低和制作成本低的优点。