
一种压电驱动式三爪微夹持器.pdf

Ma****57

1/8
2/8

3/8

4/8
5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种压电驱动式三爪微夹持器.pdf
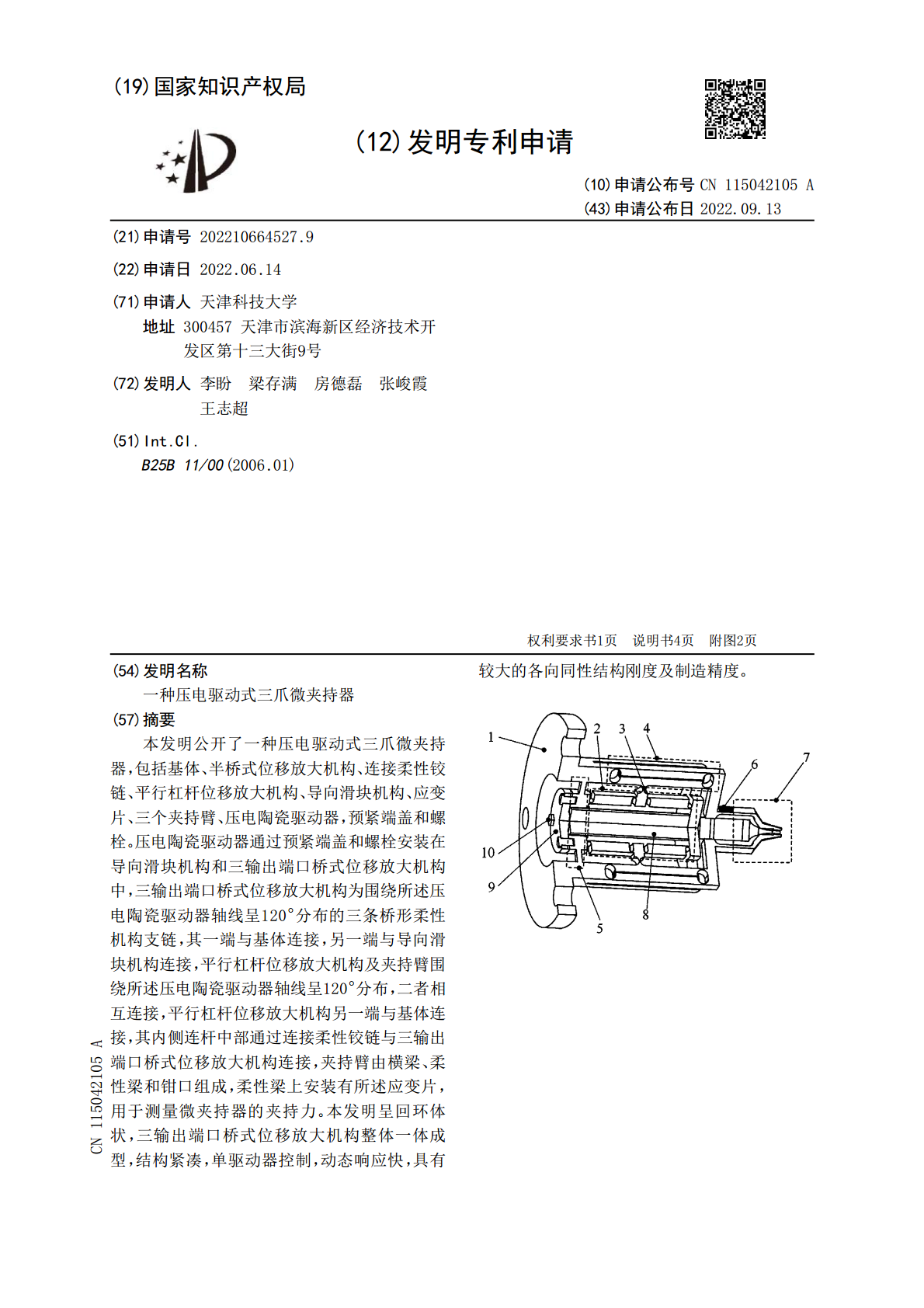
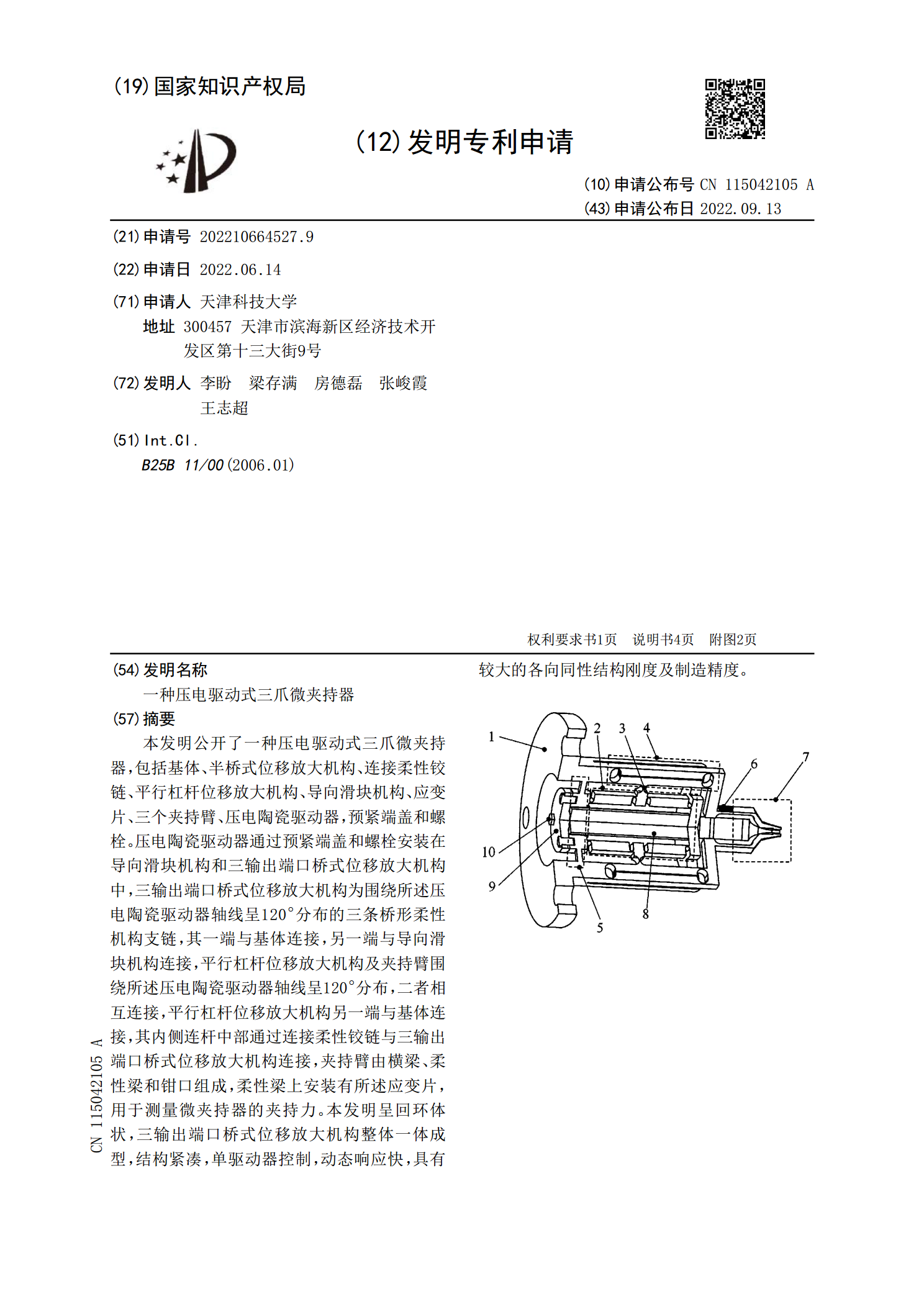
本发明公开了一种压电驱动式三爪微夹持器,包括基体、半桥式位移放大机构、连接柔性铰链、平行杠杆位移放大机构、导向滑块机构、应变片、三个夹持臂、压电陶瓷驱动器,预紧端盖和螺栓。压电陶瓷驱动器通过预紧端盖和螺栓安装在导向滑块机构和三输出端口桥式位移放大机构中,三输出端口桥式位移放大机构为围绕所述压电陶瓷驱动器轴线呈120°分布的三条桥形柔性机构支链,其一端与基体连接,另一端与导向滑块机构连接,平行杠杆位移放大机构及夹持臂围绕所述压电陶瓷驱动器轴线呈120°分布,二者相互连接,平行杠杆位移放大机构另一端与基体连接

一种三爪夹持器.pdf
一种三爪夹持器,用以夹持一轮毂,其包括支承架、动力气缸、调姿气缸、旋转杆、转动块、连杆、滑块、滑轨,旋转杆和转动块相互连接并传动扭矩,动力气缸、调姿气缸、旋转杆及圆螺母设于支承架的第一面上,转动块、连杆、滑块及滑轨设于支承架上与第一面相对的第二面上,动力气缸驱动旋转杆带动转动块旋转,连杆将转动块的转动传递给滑块,使得滑块在滑轨上做直线运动以夹紧轮毂内孔,调姿气缸动作时,调姿气缸的气缸伸缩杆伸出并顶着轮毂慢慢下压,直到该轮毂内表面完全接触滑块以实现调姿。本发明结构简单,可模块化处理,成本较低,可靠性高,使用
一种用于夹持试件的三爪式夹紧装置.pdf
本发明涉及一种用于夹持试件的三爪式夹紧装置,包括:外壳、锥齿盘I支撑体、锥齿盘I、锥齿盘I轴承、小锥齿轮I、小锥齿轮I轴、小锥齿轮I轴承、挡盖、法兰盘式连接体、锥齿盘II、锥齿盘II轴承、基座安装体、圆柱圈式连接体、小锥齿轮II、小锥齿轮II轴、小锥齿轮II轴承I、基座I、特制卡爪I、周向固定架I、小锥齿轮II轴承II、基座II、特制卡爪II、周向固定架II、自锁装置;通过所述自锁装置的变向式棘爪与棘轮相互配合,完成所述夹紧装置的自锁,通过一系列的传动机构,使所述特制卡爪I完成试件内壁的夹紧工作,使所述特
夹持器驱动装置与夹持器.pdf
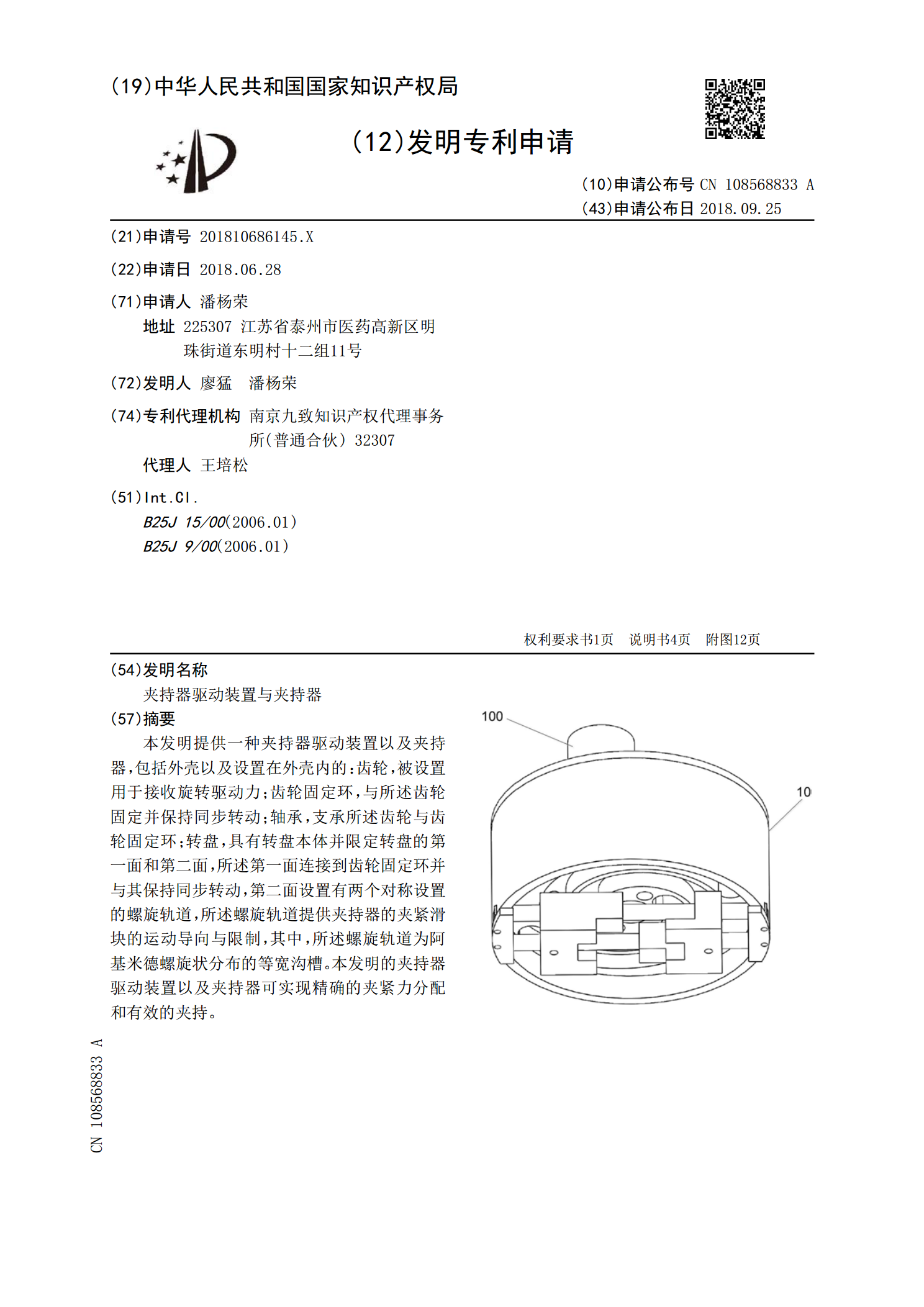
本发明提供一种夹持器驱动装置以及夹持器,包括外壳以及设置在外壳内的:齿轮,被设置用于接收旋转驱动力;齿轮固定环,与所述齿轮固定并保持同步转动;轴承,支承所述齿轮与齿轮固定环;转盘,具有转盘本体并限定转盘的第一面和第二面,所述第一面连接到齿轮固定环并与其保持同步转动,第二面设置有两个对称设置的螺旋轨道,所述螺旋轨道提供夹持器的夹紧滑块的运动导向与限制,其中,所述螺旋轨道为阿基米德螺旋状分布的等宽沟槽。本发明的夹持器驱动装置以及夹持器可实现精确的夹紧力分配和有效的夹持。

一种用于夹持试件外壁的三爪式夹紧装置.pdf
本发明涉及一种用于夹持试件外壁的三爪式夹紧装置,包括:外壳、锥齿盘I支撑体、锥齿盘I轴承、锥齿盘I、小锥齿轮I、小锥齿轮I轴、小锥齿轮I轴承、锥齿盘II、挡盖、小锥齿轮II、小锥齿轮II轴承、小锥齿轮II轴、基座、特制卡爪、周向固定架、自锁装置;本发明一种用于夹持试件外壁的三爪式夹紧装置通过所述自锁装置的棘爪与棘轮相互配合,从而完成所述夹紧装置的自锁,使所述夹紧装置具有自锁的功能,通过一系列的传动机构,将所述特制卡爪的弧形末端推向中心轴线,完成试件的夹紧工作,具有结构简单、紧凑,工艺性好,操作方便等优点。