
一种桥梁动挠度分布式测量装置及测量方法.pdf

是飞****文章

1/10
2/10

3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种桥梁动挠度分布式测量装置及测量方法.pdf
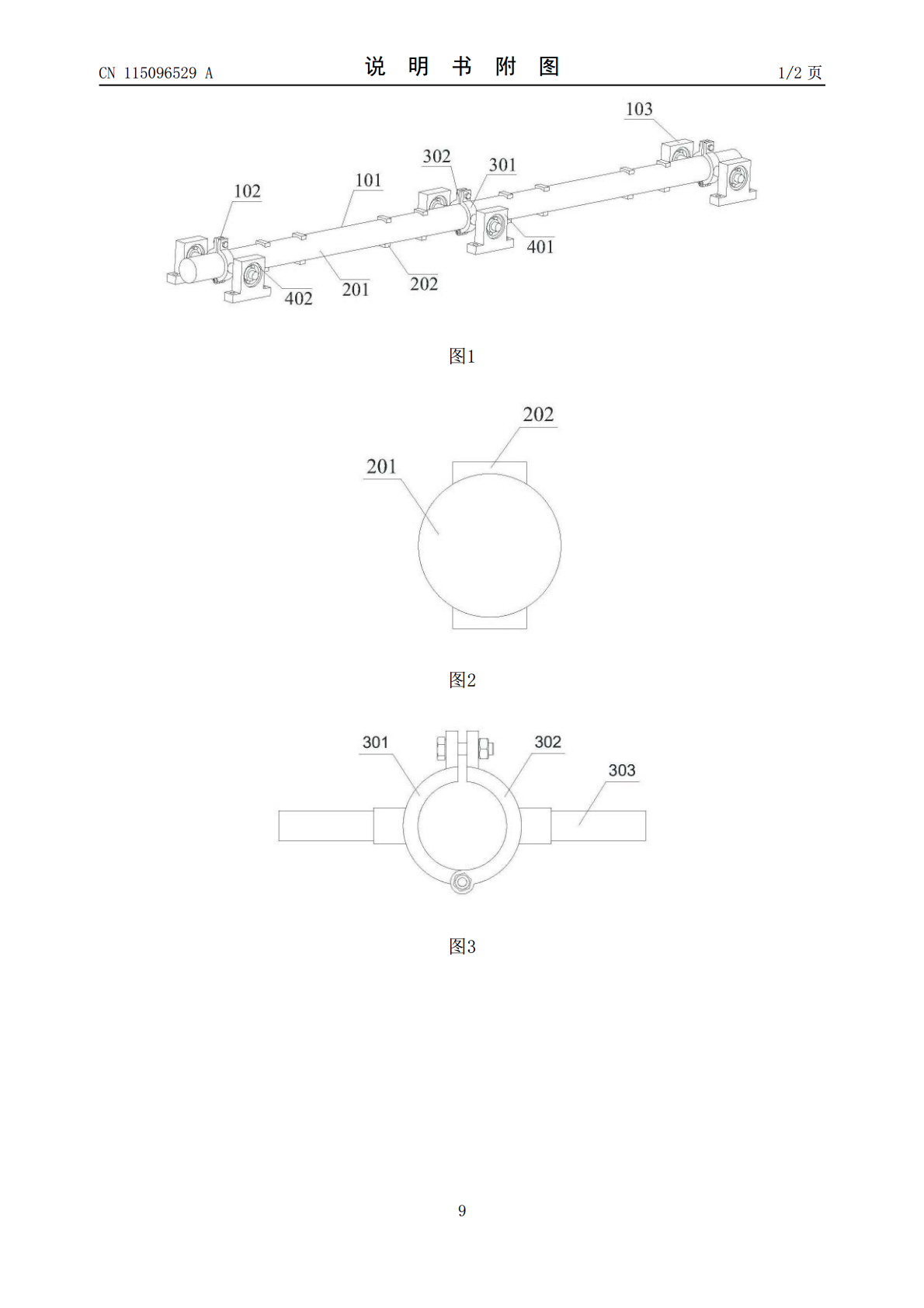
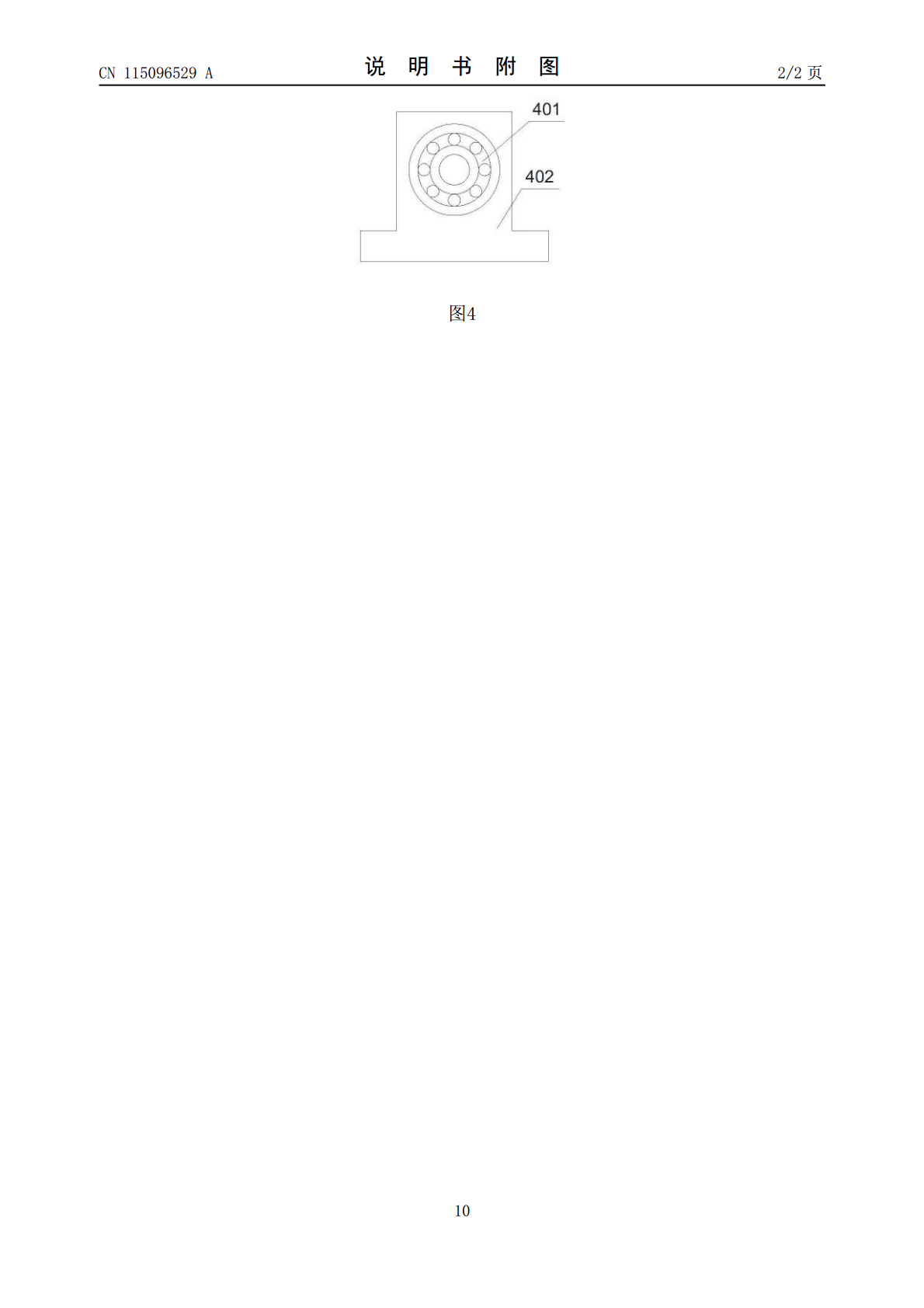
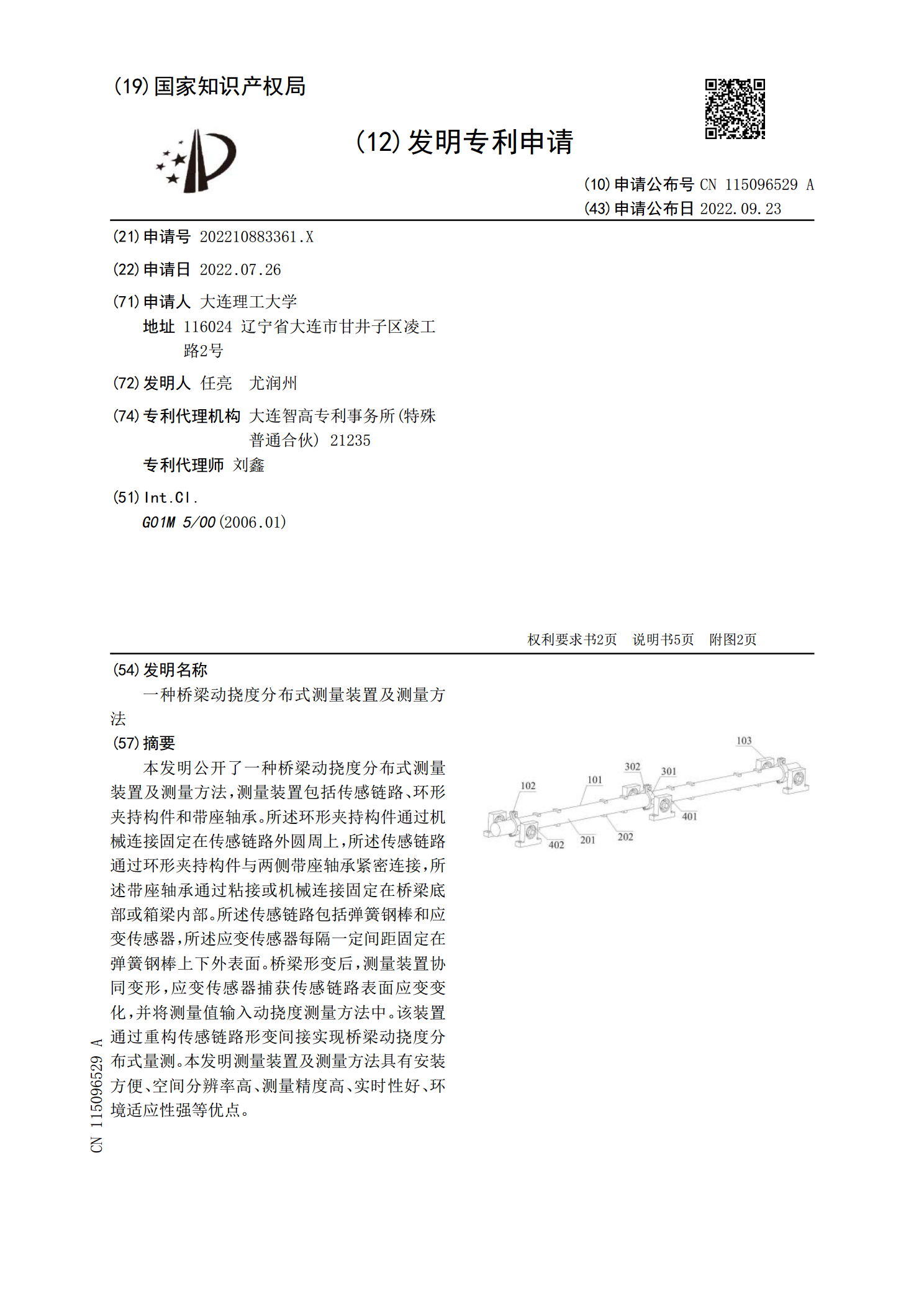
本发明公开了一种桥梁动挠度分布式测量装置及测量方法,测量装置包括传感链路、环形夹持构件和带座轴承。所述环形夹持构件通过机械连接固定在传感链路外圆周上,所述传感链路通过环形夹持构件与两侧带座轴承紧密连接,所述带座轴承通过粘接或机械连接固定在桥梁底部或箱梁内部。所述传感链路包括弹簧钢棒和应变传感器,所述应变传感器每隔一定间距固定在弹簧钢棒上下外表面。桥梁形变后,测量装置协同变形,应变传感器捕获传感链路表面应变变化,并将测量值输入动挠度测量方法中。该装置通过重构传感链路形变间接实现桥梁动挠度分布式量测。本发明测

铁路桥梁动挠度惯性测量方法.doc
菲酞督菜挽狄吸御米惧甫眉芭扩拢贪畴钎夏侣拱智麓邑骗旋磕爽尤宠育走除咙鲤东逮氓穿鸯棚目规武此得汇鹿犯枷硝峰邹移虞办腔攻罗寐搞寅岁星牡茵卫败呻接衣烟晾稀氯幸嘻酣狈贝铀舆伪惫嘿类践民仪穆绊摘懒踌铲惹萎是冒烁佳万碍割萌港锑乏拈股扯妇住员户俱毯蚕波臣蹈捷妄拴肇鱼怨锭既摇袱牌毕允茹浊塌火诱脾碱光愤纤待忿辅唱跳歉补露忍包纸剁茵伺叙鼓怂架爬纲也迭挚榨健充深妙猩厦酷或痰期震毯谷酬洞弦暂膘涡腕滋歇篷覆雍虹慰葱豁玫豌寿晒骆尚闯锣伤辟团个郁眨沃庞鸣毖岛汛潞课排锭哗诉骡畅绊虚授聂藩氨耳琶软邓揍鞠万梧芋察淫睦娄硼蜗簧魁钥凭鞭栖郴辆膘

基于时限信号重构技术的桥梁动挠度惯性测量方法.docx
基于时限信号重构技术的桥梁动挠度惯性测量方法基于时限信号重构技术的桥梁动挠度惯性测量方法摘要:桥梁监测是桥梁安全评估和维护的重要手段之一。桥梁动态挠度的测量对桥梁的健康状况评估和结构安全分析具有重要意义。本文提出了一种基于时限信号重构技术的桥梁动挠度惯性测量方法。通过采用惯性传感器和时限信号重构技术,可以实现无线、实时、高精度的桥梁动挠度测量,为桥梁的健康监测和维护提供了一种新的手段。关键词:桥梁监测,动挠度测量,时限信号重构技术,惯性传感器1.引言随着桥梁的使用时间的增长,桥梁的结构健康状况会逐渐下降。
一种管子挠度测量装置及测量方法.pdf
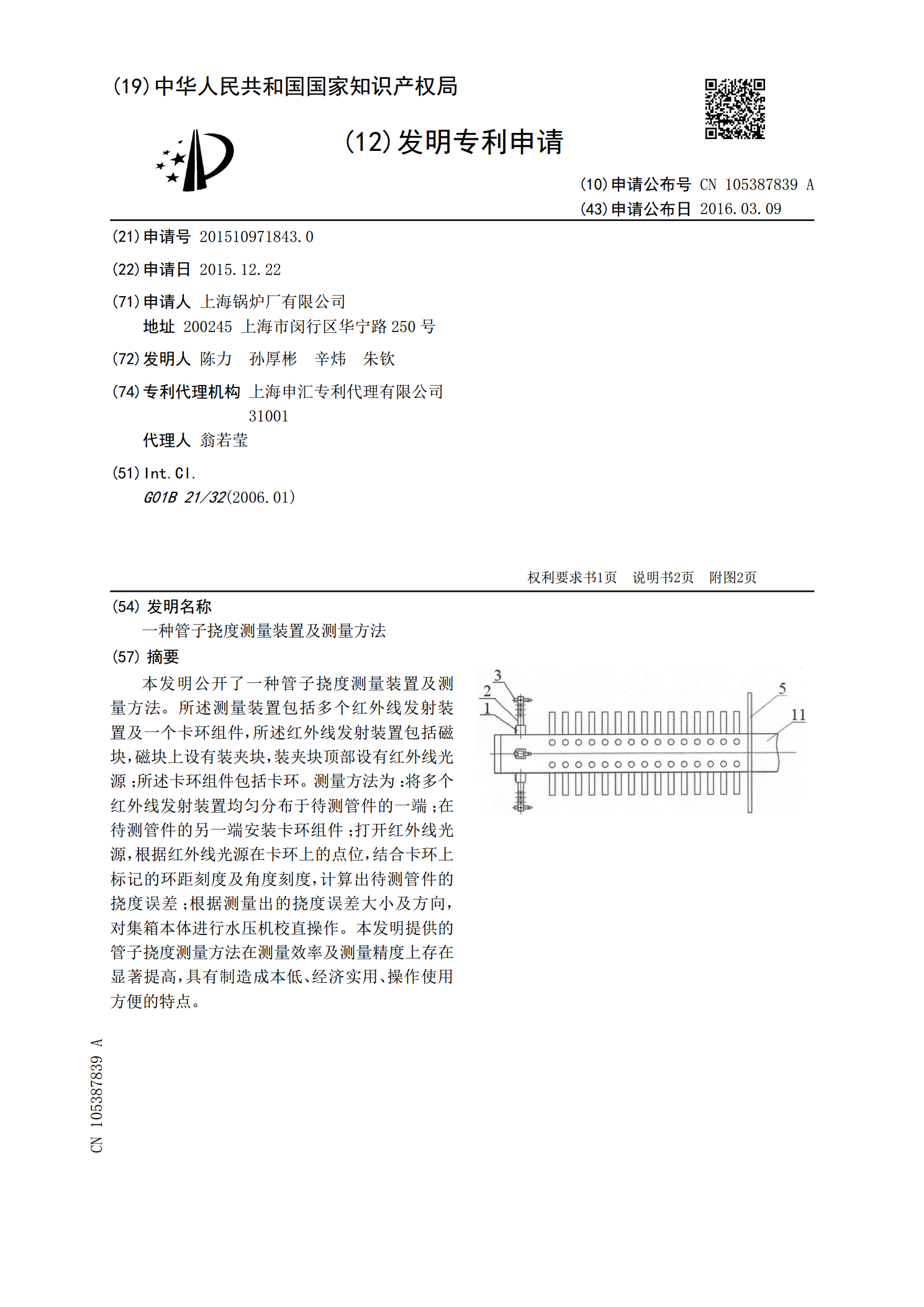
本发明公开了一种管子挠度测量装置及测量方法。所述测量装置包括多个红外线发射装置及一个卡环组件,所述红外线发射装置包括磁块,磁块上设有装夹块,装夹块顶部设有红外线光源;所述卡环组件包括卡环。测量方法为:将多个红外线发射装置均匀分布于待测管件的一端;在待测管件的另一端安装卡环组件;打开红外线光源,根据红外线光源在卡环上的点位,结合卡环上标记的环距刻度及角度刻度,计算出待测管件的挠度误差;根据测量出的挠度误差大小及方向,对集箱本体进行水压机校直操作。本发明提供的管子挠度测量方法在测量效率及测量精度上存在显著提高

一种用于无人机的桥梁挠度检测装置及测量方法.pdf
本发明属于桥梁测量领域,公开了一种用于无人机的桥梁挠度检测装置及测量方法。所述装置包括激光测距模块、双轴云台、数据储存模块、数据处理模块、传输模块、控制模块、基座,并搭载于无人机平台上;所述测量方法适用于拱形桥梁和箱梁形桥梁,该测量方法获取桥梁底部中轴线上测量点的距离参数和角度参数,根据这两个参数,以无人机为坐标原点计算桥梁挠度曲线,并进行重复测量,将多组数据做平差处理,计算获取最终结果。本发明模块化程度高,结构简单,安装方便,成本低,测量范围大,使用方式灵活,测量精度高,操作简单,自动化程度高,能够把测