
力觉传感器和嵌合系统.pdf

骊蓉****23


1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
力觉传感器和嵌合系统.pdf
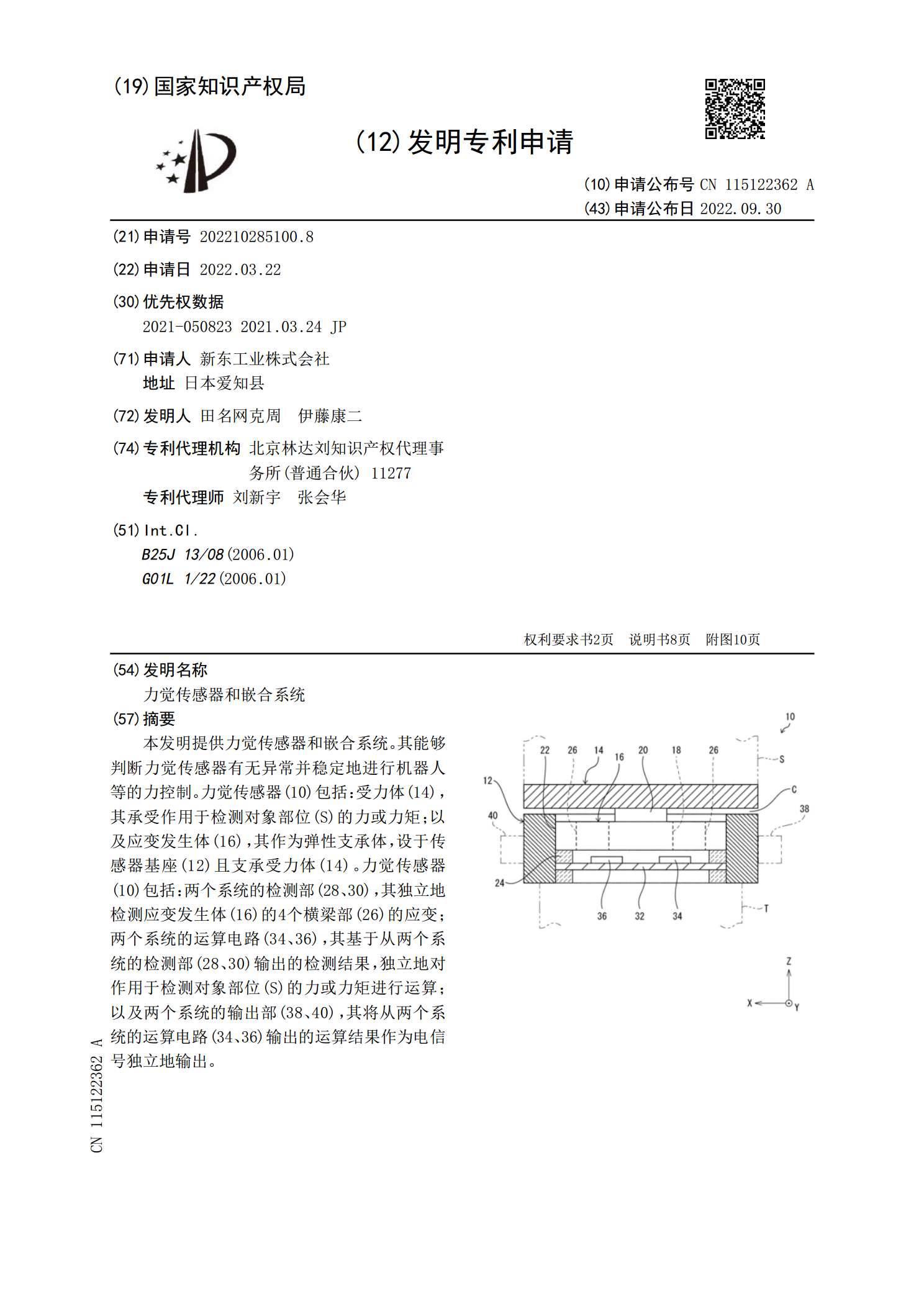
本发明提供力觉传感器和嵌合系统。其能够判断力觉传感器有无异常并稳定地进行机器人等的力控制。力觉传感器(10)包括:受力体(14),其承受作用于检测对象部位(S)的力或力矩;以及应变发生体(16),其作为弹性支承体,设于传感器基座(12)且支承受力体(14)。力觉传感器(10)包括:两个系统的检测部(28、30),其独立地检测应变发生体(16)的4个横梁部(26)的应变;两个系统的运算电路(34、36),其基于从两个系统的检测部(28、30)输出的检测结果,独立地对作用于检测对象部位(S)的力或力矩进行运算

PVDF力觉传感器的研究.docx
PVDF力觉传感器的研究PVDF力觉传感器的研究摘要力觉传感器是一种广泛应用于机器人、医疗设备和工业自动化等领域的传感器。聚偏氟乙烯(Polyvinylidenefluoride,PVDF)由于其低成本、高灵敏度和良好的稳定性,成为力觉传感器领域的研究热点。本文综述了PVDF力觉传感器的原理、制备方法和应用领域,并对其未来的发展进行了展望。1.引言力觉传感器是用于检测物体与机器人末端或人体接触的力量和压力的装置。近年来,随着机器人技术、医疗技术和工业自动化的发展,力觉传感器在各个领域得到了广泛的应用。聚偏
传感器芯片、力觉传感器装置.pdf
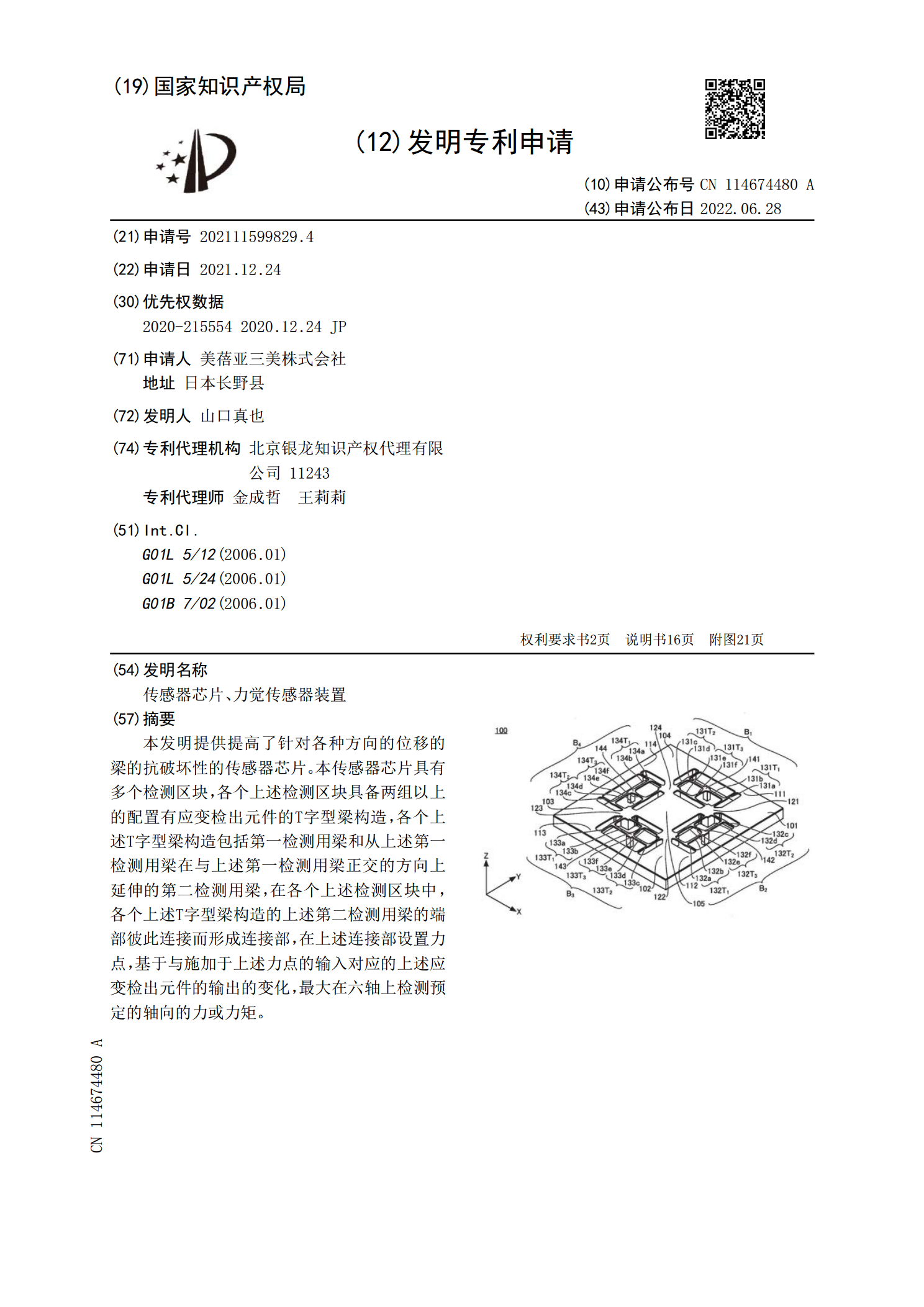
本发明提供提高了针对各种方向的位移的梁的抗破坏性的传感器芯片。本传感器芯片具有多个检测区块,各个上述检测区块具备两组以上的配置有应变检出元件的T字型梁构造,各个上述T字型梁构造包括第一检测用梁和从上述第一检测用梁在与上述第一检测用梁正交的方向上延伸的第二检测用梁,在各个上述检测区块中,各个上述T字型梁构造的上述第二检测用梁的端部彼此连接而形成连接部,在上述连接部设置力点,基于与施加于上述力点的输入对应的上述应变检出元件的输出的变化,最大在六轴上检测预定的轴向的力或力矩。

虚拟现实系统中的手部跟踪和力觉再现技术研究.docx
虚拟现实系统中的手部跟踪和力觉再现技术研究虚拟现实(VR)是一种通过计算机生成的三维环境,让用户感觉像在现实世界中一样。在传统的虚拟现实系统中,用户通常需要通过操纵器件如键盘、鼠标或游戏手柄等来与虚拟世界进行交互。然而,这种交互方式限制了用户对虚拟环境的感知和参与度。因此,实现手部跟踪和力觉再现技术成为了虚拟现实领域的研究热点之一。手部跟踪是指通过传感器或相机等设备将用户的手部动作转化为虚拟环境中相应的手部动作。手部跟踪技术可以分为基于传感器的和基于视觉的两种类型。传感器技术通常采用陀螺仪、加速度计和磁力

基于虚拟3D视觉和力觉交互的SEM遥纳操作系统.docx
基于虚拟3D视觉和力觉交互的SEM遥纳操作系统概述扫描电子显微镜(SEM)是一种用于高分辨率表面成像的技术。SEM的操作需要高度的专业技能和手工精度。在传统的SEM操作中,操作员需要手动调整显微镜镜头以便观察样品,并使用键盘和鼠标进行操作。这种操作方式对操作员的精密度和疲劳程度有很高的要求,同时,在进行显微镜操作的同时操控样品仪器也是一项挑战。为了解决这些问题,基于虚拟3D视觉和力觉交互的SEM遥纳操作系统应运而生。SEM遥纳操作系统通过使用3D虚拟视觉技术和力觉反馈技术来模拟真实世界,使操作员可以使用手