
基于虚拟3D视觉和力觉交互的SEM遥纳操作系统.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于虚拟3D视觉和力觉交互的SEM遥纳操作系统.docx
基于虚拟3D视觉和力觉交互的SEM遥纳操作系统概述扫描电子显微镜(SEM)是一种用于高分辨率表面成像的技术。SEM的操作需要高度的专业技能和手工精度。在传统的SEM操作中,操作员需要手动调整显微镜镜头以便观察样品,并使用键盘和鼠标进行操作。这种操作方式对操作员的精密度和疲劳程度有很高的要求,同时,在进行显微镜操作的同时操控样品仪器也是一项挑战。为了解决这些问题,基于虚拟3D视觉和力觉交互的SEM遥纳操作系统应运而生。SEM遥纳操作系统通过使用3D虚拟视觉技术和力觉反馈技术来模拟真实世界,使操作员可以使用手
一种基于扫描电子显微镜的虚拟力反馈遥纳操作平台及实现虚拟力觉交互的方法.pdf
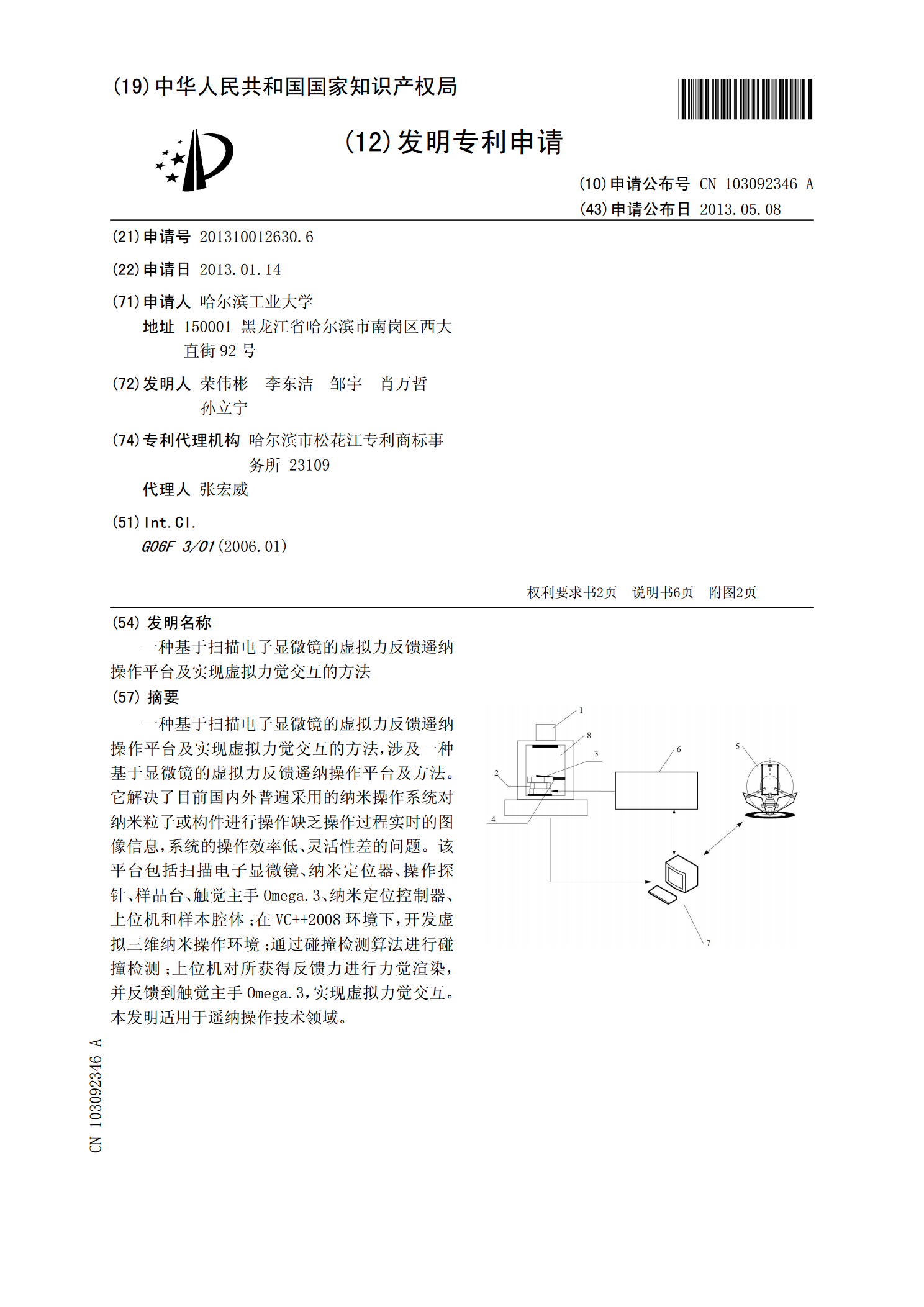
一种基于扫描电子显微镜的虚拟力反馈遥纳操作平台及实现虚拟力觉交互的方法,涉及一种基于显微镜的虚拟力反馈遥纳操作平台及方法。它解决了目前国内外普遍采用的纳米操作系统对纳米粒子或构件进行操作缺乏操作过程实时的图像信息,系统的操作效率低、灵活性差的问题。该平台包括扫描电子显微镜、纳米定位器、操作探针、样品台、触觉主手Omega.3、纳米定位控制器、上位机和样本腔体;在VC++2008环境下,开发虚拟三维纳米操作环境;通过碰撞检测算法进行碰撞检测;上位机对所获得反馈力进行力觉渲染,并反馈到触觉主手Omega.3,

基于虚拟现实的力觉临场感遥操作研究的开题报告.docx
基于虚拟现实的力觉临场感遥操作研究的开题报告一、研究背景在当前数字化时代,虚拟现实(VirtualReality,VR)技术正在飞速发展,逐渐应用于众多领域。虚拟现实技术可以让用户身临其境地感受到虚拟场景,其生动的场景感和仿真的交互体验造就了其广泛应用范围。同时,在机器人领域,远程操作技术被广泛应用于复杂环境下的机器人控制中。但是,由于远程操作距离过远,操作者无法获得机器人运动的真实感受,造成操作的精度和效率下降,严重限制了远程操作的应用范围。因此,研究基于虚拟现实技术的力觉临场感遥操作技术,尤其是在高危

基于虚拟现实的力觉临场感遥操作研究的综述报告.docx
基于虚拟现实的力觉临场感遥操作研究的综述报告虚拟现实技术已经得到了广泛的应用,尤其是在工业领域中。虚拟现实技术提供了一种新的手段,可以在不接触物理对象的情况下进行操作。然而,在某些情况下,需要通过机器人来进行远程操作,这就需要一种适应于虚拟现实技术的力觉临场感遥操作技术。力觉临场感遥操作技术是通过机器人来执行远程控制,可以通过虚拟现实技术来实现,从而达到操作远程对象的目的。力觉临场感遥操作技术是一种越来越流行的技术,它可以帮助人们在不接触到实际物理对象的情况下进行远程操作。本文将综述最近几年来虚拟现实中基

基于虚拟现实的力觉临场感遥操作研究的任务书.docx
基于虚拟现实的力觉临场感遥操作研究的任务书任务书项目名称:基于虚拟现实的力觉临场感遥操作研究项目背景:随着虚拟现实技术的发展,人们可以通过头戴式显示器等设备进入虚拟空间,与虚拟世界进行交互和操作。然而,在虚拟现实中,由于缺乏真实的物理环境和接触感,人们往往无法感受到真实世界中的力觉临场感,这限制了虚拟现实技术的应用范围。因此,本项目旨在研究基于虚拟现实的力觉临场感遥操作技术,以提高虚拟现实技术的应用性能。项目内容:1.研究虚拟现实中的力觉临场感技术,调研相关技术和应用现状。2.设计虚拟现实操作系统的硬件和