
一种自动焊接系统及其应用.pdf

闪闪****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种自动焊接系统及其应用.pdf
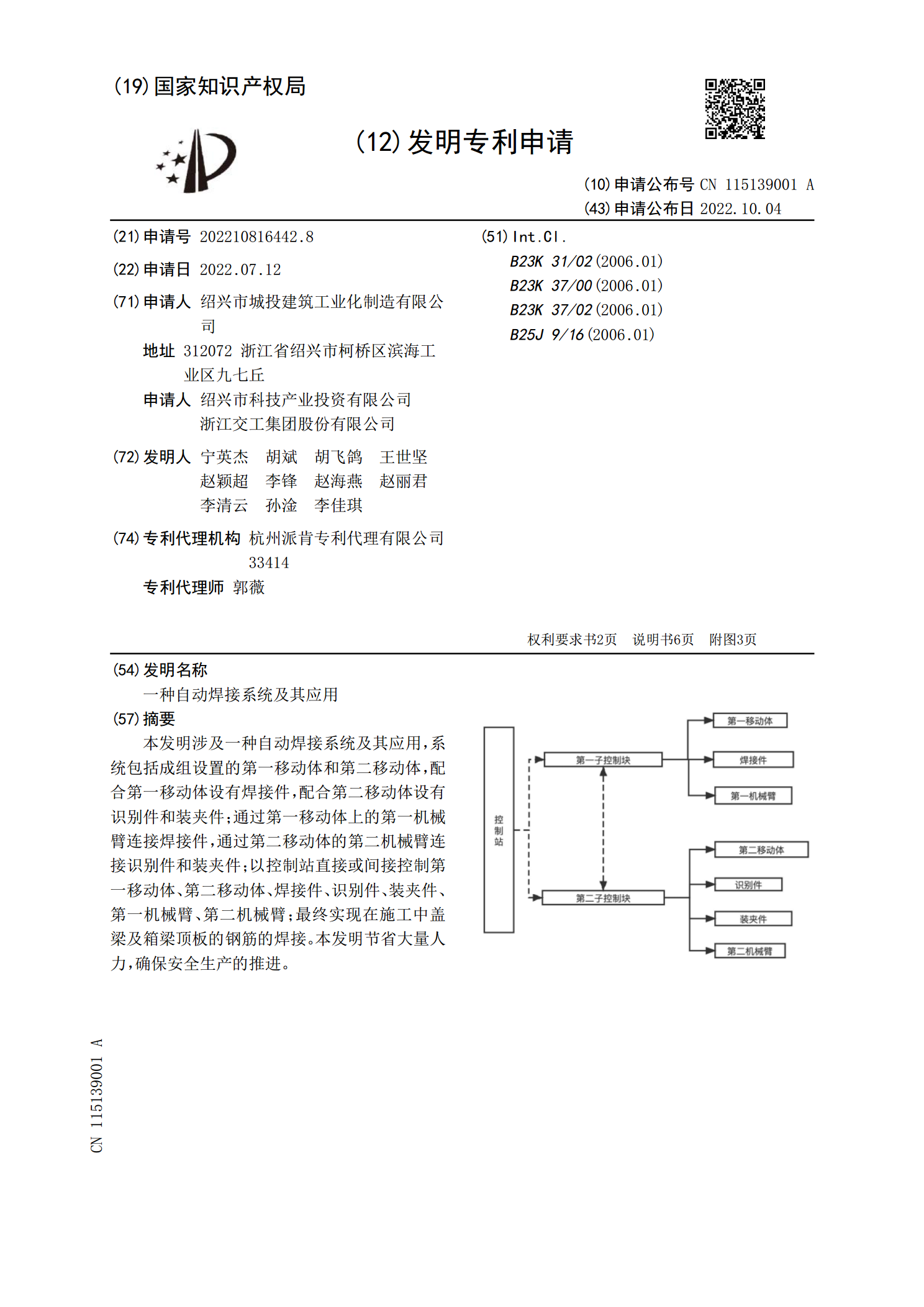
本发明涉及一种自动焊接系统及其应用,系统包括成组设置的第一移动体和第二移动体,配合第一移动体设有焊接件,配合第二移动体设有识别件和装夹件;通过第一移动体上的第一机械臂连接焊接件,通过第二移动体的第二机械臂连接识别件和装夹件;以控制站直接或间接控制第一移动体、第二移动体、焊接件、识别件、装夹件、第一机械臂、第二机械臂;最终实现在施工中盖梁及箱梁顶板的钢筋的焊接。本发明节省大量人力,确保安全生产的推进。

一种自动无缝焊接工艺及其应用.pdf
本发明公开了一种自动无缝焊接工艺,钢制板材为不锈钢板材,包括步骤:S10)、对不锈钢板材进行切割,形成V型坡口,对V型坡口进行清理,以该V型坡口作为焊接位置;S20)、将已完成预热的焊条向自动焊接机送料,通过自动焊接机对不锈钢板材的焊接位置进行自送电弧焊;其中,焊条包括不锈钢皮层以及封装在不锈钢皮层内的药芯组合物,药芯组合物包括40‑60wt%的二氧化硅矿石粉、20‑50wt%的铁粉、3‑6wt%的镍锰合金、3‑10wt%的硼润土,1‑6wt%的气相二氧化硅、1‑5wt%的氧化铝以及1‑3wt%的苯偶姻,
一种自动焊接系统.pdf
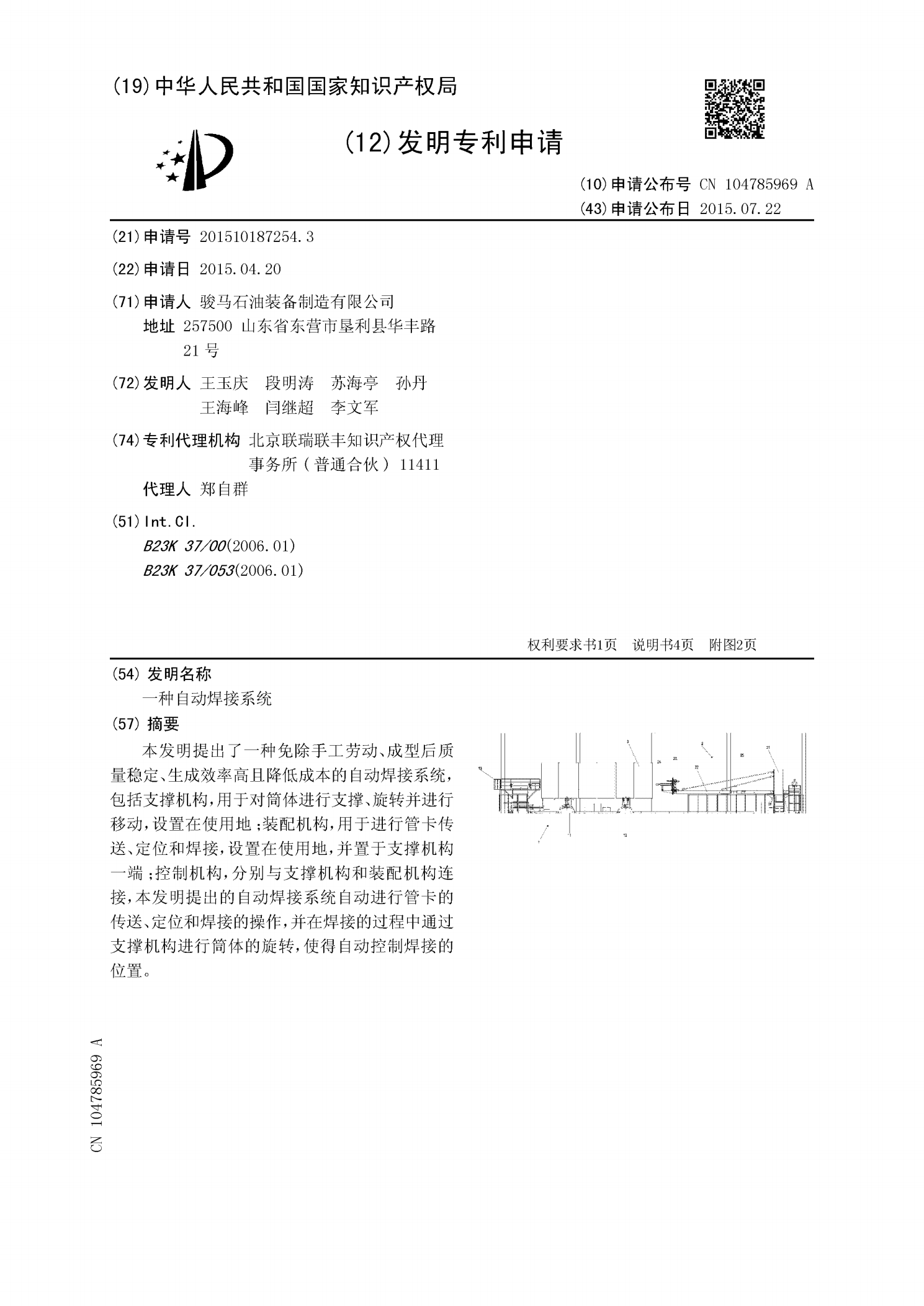
本发明提出了一种免除手工劳动、成型后质量稳定、生成效率高且降低成本的自动焊接系统,包括支撑机构,用于对筒体进行支撑、旋转并进行移动,设置在使用地;装配机构,用于进行管卡传送、定位和焊接,设置在使用地,并置于支撑机构一端;控制机构,分别与支撑机构和装配机构连接,本发明提出的自动焊接系统自动进行管卡的传送、定位和焊接的操作,并在焊接的过程中通过支撑机构进行筒体的旋转,使得自动控制焊接的位置。
一种自动焊接用电池片托盘及其自动焊接方法.pdf
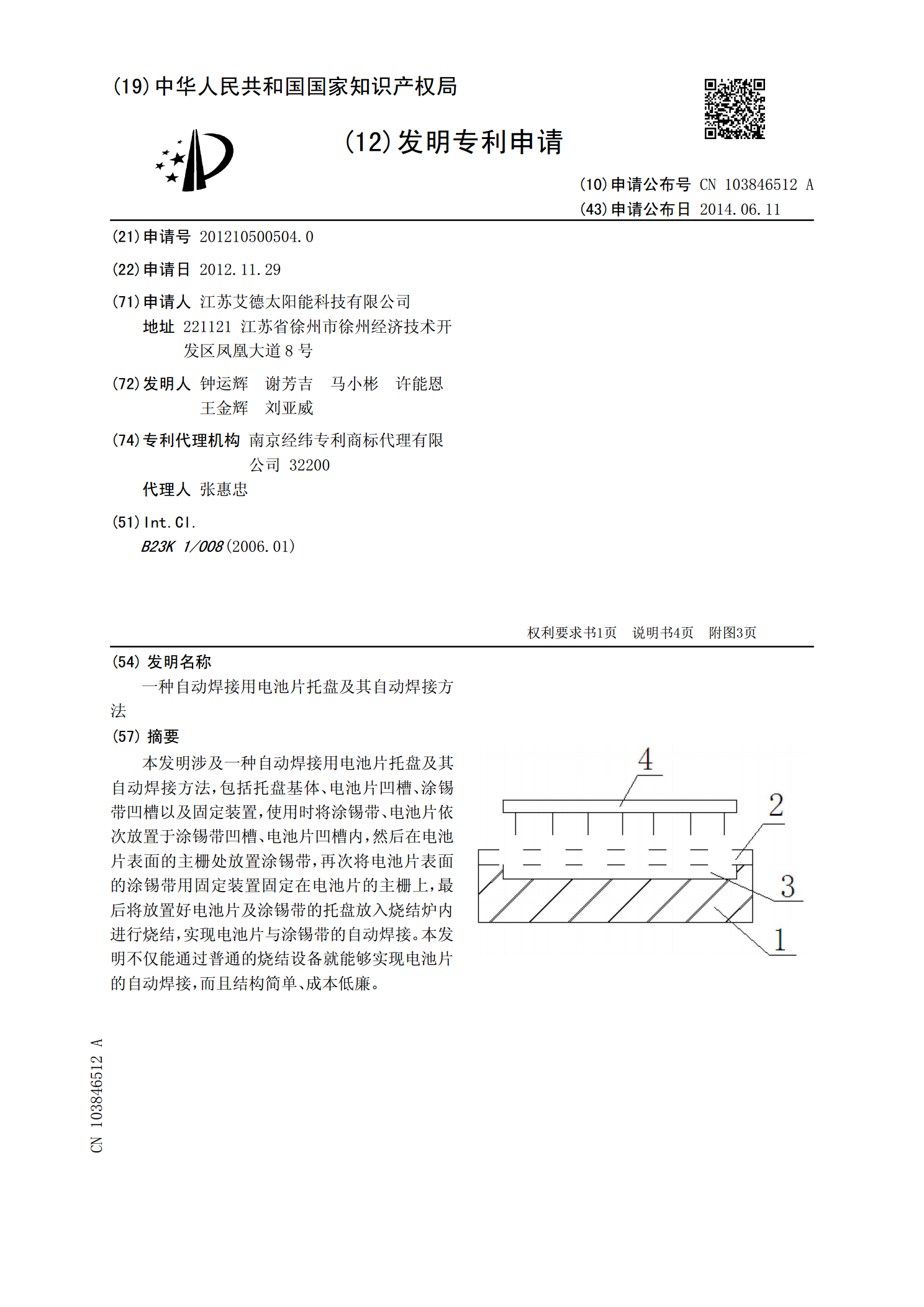
本发明涉及一种自动焊接用电池片托盘及其自动焊接方法,包括托盘基体、电池片凹槽、涂锡带凹槽以及固定装置,使用时将涂锡带、电池片依次放置于涂锡带凹槽、电池片凹槽内,然后在电池片表面的主栅处放置涂锡带,再次将电池片表面的涂锡带用固定装置固定在电池片的主栅上,最后将放置好电池片及涂锡带的托盘放入烧结炉内进行烧结,实现电池片与涂锡带的自动焊接。本发明不仅能通过普通的烧结设备就能够实现电池片的自动焊接,而且结构简单、成本低廉。
一种叶轮自动焊接系统.pdf
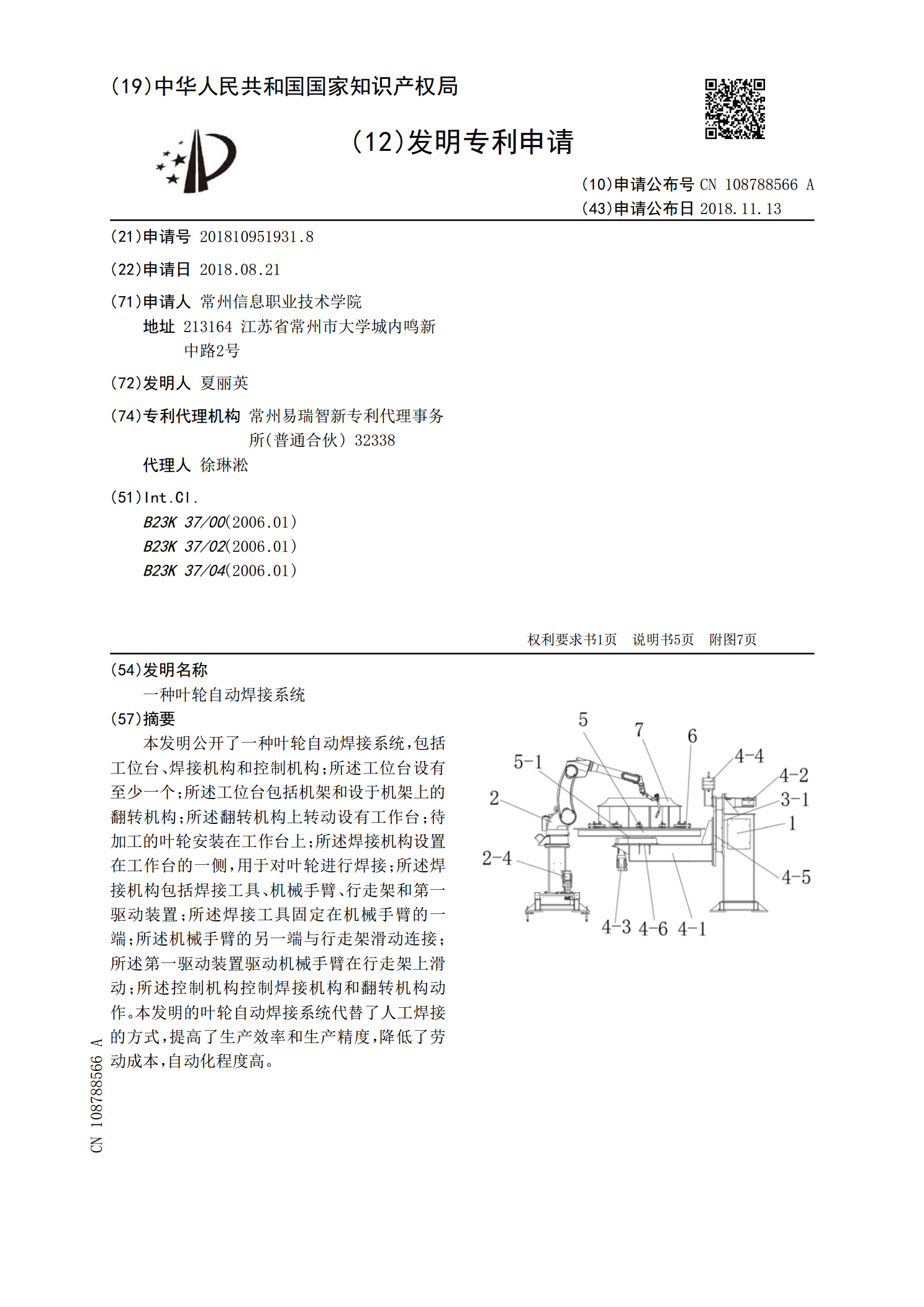
本发明公开了一种叶轮自动焊接系统,包括工位台、焊接机构和控制机构;所述工位台设有至少一个;所述工位台包括机架和设于机架上的翻转机构;所述翻转机构上转动设有工作台;待加工的叶轮安装在工作台上;所述焊接机构设置在工作台的一侧,用于对叶轮进行焊接;所述焊接机构包括焊接工具、机械手臂、行走架和第一驱动装置;所述焊接工具固定在机械手臂的一端;所述机械手臂的另一端与行走架滑动连接;所述第一驱动装置驱动机械手臂在行走架上滑动;所述控制机构控制焊接机构和翻转机构动作。本发明的叶轮自动焊接系统代替了人工焊接的方式,提高了生