
一种非接触式桥梁裂缝自动检测装置和检测方法.pdf

是笛****加盟


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种非接触式桥梁裂缝自动检测装置和检测方法.pdf
本发明属于桥梁检测技术备领域,特别涉及一种非接触式桥梁裂缝自动检测装置和检测方法,包括设置于桥梁侧面的固定机构,固定机构下方设有滑轨,滑轨内设有二维移动机构,二维移动机构下方设有二维升降机构,二维升降机构连接有裂缝观测机构;裂缝观测机构包括控制机构和数据模块,数据模块连接CCD相机、距离传感器、摄像头,控制机构连接驱动机构控制二维移动机构和二维升降机构;本装置通过摄像头将观测到的裂缝坐标传输到驱动模块,驱动模块控制旋转电机移动至对应坐标处,通过机械抓手三维坐标的变换实现桥梁腹板处任意角度的裂缝观测,再对图
一种非接触式水位检测装置及检测方法.pdf
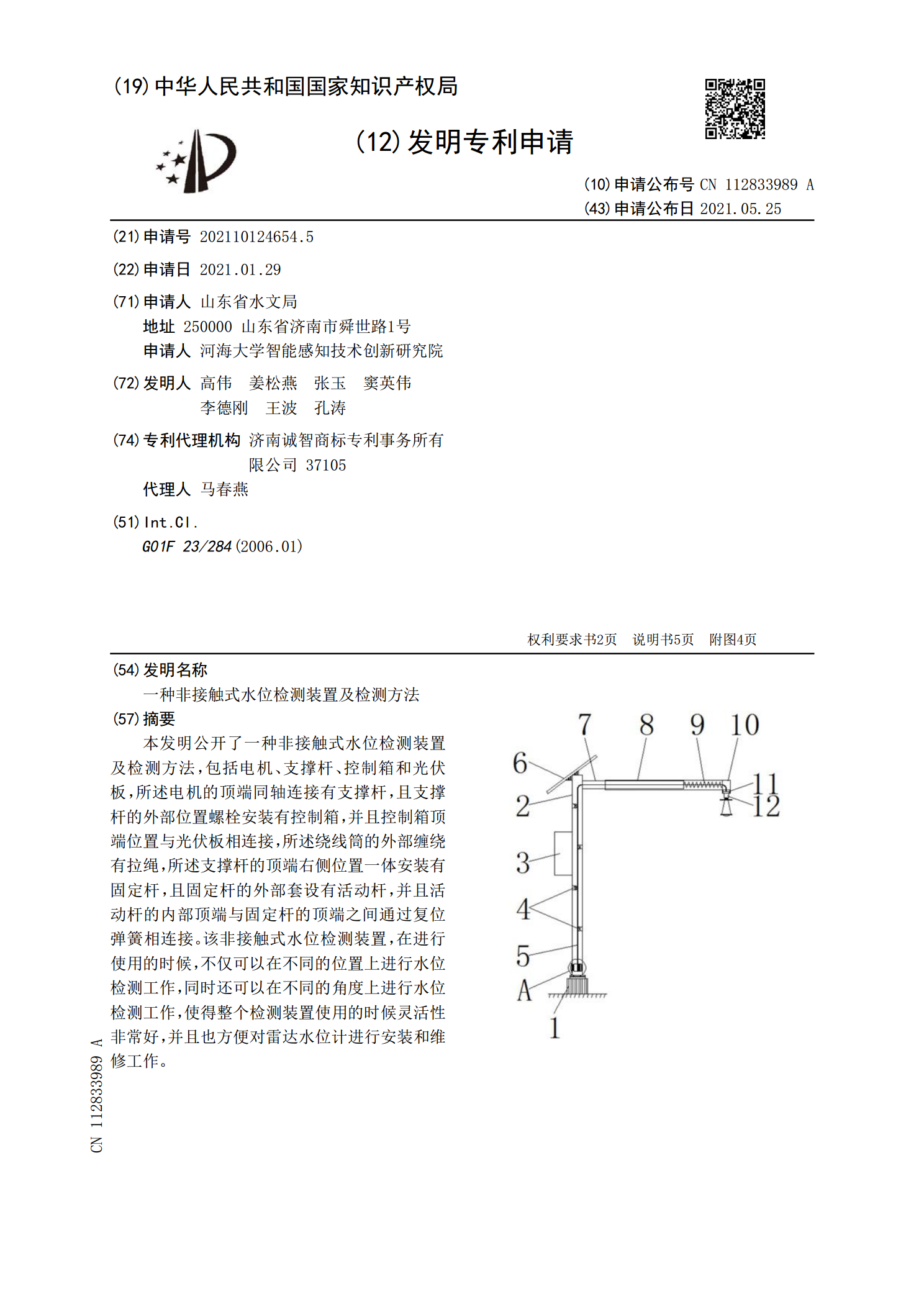
本发明公开了一种非接触式水位检测装置及检测方法,包括电机、支撑杆、控制箱和光伏板,所述电机的顶端同轴连接有支撑杆,且支撑杆的外部位置螺栓安装有控制箱,并且控制箱顶端位置与光伏板相连接,所述绕线筒的外部缠绕有拉绳,所述支撑杆的顶端右侧位置一体安装有固定杆,且固定杆的外部套设有活动杆,并且活动杆的内部顶端与固定杆的顶端之间通过复位弹簧相连接。该非接触式水位检测装置,在进行使用的时候,不仅可以在不同的位置上进行水位检测工作,同时还可以在不同的角度上进行水位检测工作,使得整个检测装置使用的时候灵活性非常好,并且也

一种视觉非接触自动检测装置.pdf
本发明公开了一种视觉非接触自动检测装置,包括工作台,工作台顶部固定设置有检测台和收集台,工作台顶部四角固定安装有支撑柱,支撑柱顶部固定安装有主机座,主机座在靠近检测台一侧固定安装有检测探头,检测探头一侧固定安装有吸附盘,检测台顶部固定安装有直线导轨电机,该种视觉非接触自动检测装置,结构简单合理,设计新颖,通过直线导轨电机和载物座的设置,对待检测的产品进行多方位的移动,从而实现全方位的检测,提升检测的准确性,通过真空吸附板和收集台的设置,对检测完成的产品进行分类,同时检测完成的产品放置在收集台呢放置槽内部,

一种桥梁裂缝自动检测方法.pdf
本发明涉及桥梁检测设备领域,具体是一种桥梁裂缝自动检测方法,所述检测方法基于一桥梁裂缝自动检测装置实现,所述桥梁裂缝自动检测装置包括有底板、自动探伤机构、桥面检测机构和升降机构,所述底板的底部设有行走机构,自动探伤机构包括有支撑座、护栏顶面探伤组件、护栏侧壁探伤组件和桥梁底面探伤组件,护栏顶面探伤组件包括有U型支撑板和固定块,该固定块的底部开设有安装槽,该安装槽内设有护栏顶面探伤部件。本发明的有益效果是通过护栏顶面探伤组件和护栏侧壁探伤组件能够分别对护栏的顶面和侧壁进行探伤作业,通过角度调节部件能够使第四

一种桥梁裂缝的自动检测方法.pdf
本发明公开了一种桥梁裂缝的自动检测方法,所述检测方法基于桥梁裂缝自动检测装置实现所述桥梁裂缝自动检测装置包括:移动单元,包括第一安装板,所述第一安装板下方滑动设置有第二安装板,所述第一安装板和第二安装板上分别固定穿插有多个第一立管和第二立管,所述第一立管与第二立管顶端均设有吸盘,所述第二安装板底面设有真空泵,所述第二安装板顶面设有双轴电机,所述双轴电机输出端固定连接有螺纹杆,所述螺纹杆上螺纹连接有螺纹套;摄像单元,包括摄像设备本体。本发明通过将该桥梁裂缝自动检测装置上的吸盘贴合桥梁底面,然后启动真空泵与双