
一种矿井多功能破障救援机器人.pdf

一只****生物

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种矿井多功能破障救援机器人.pdf
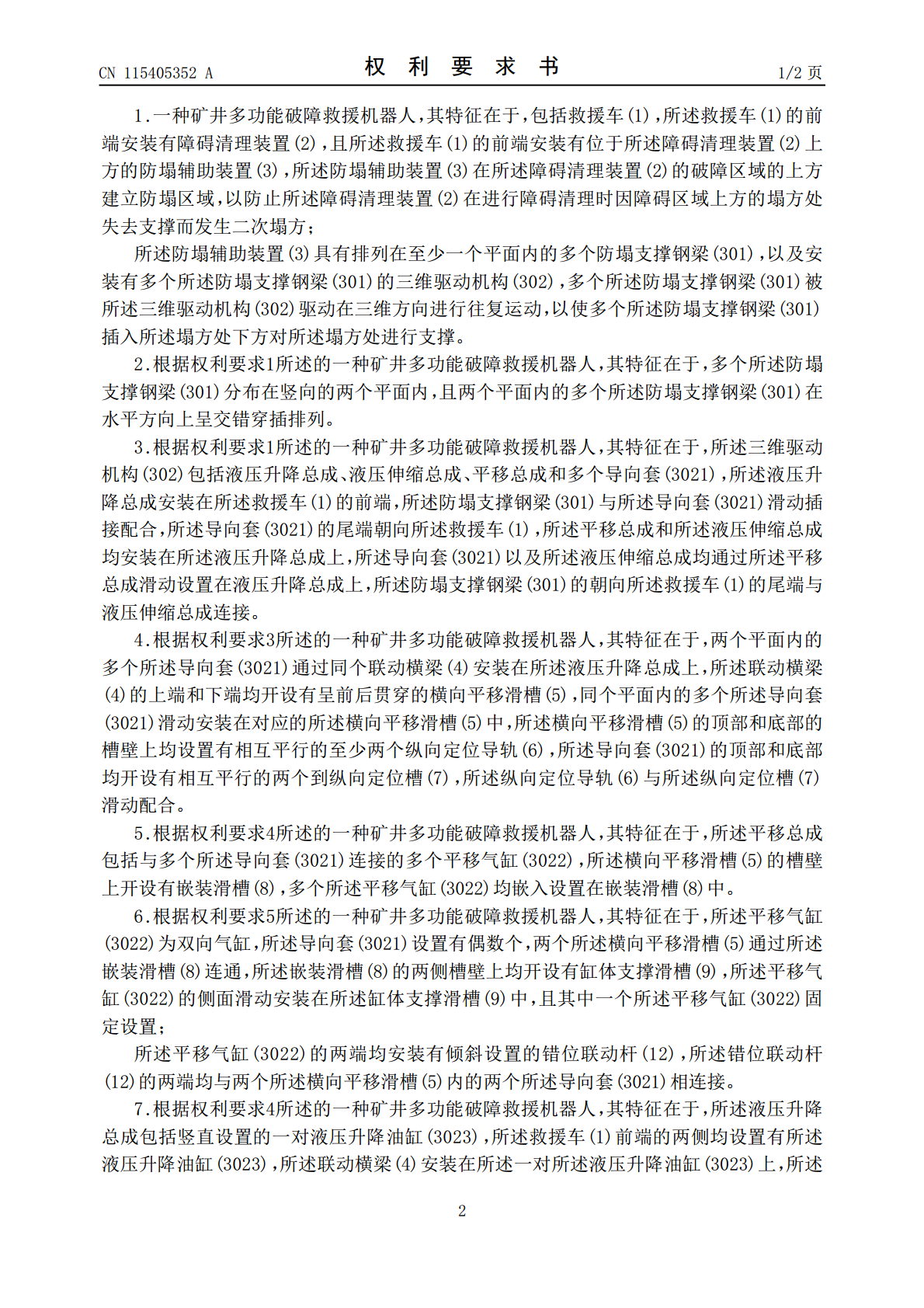
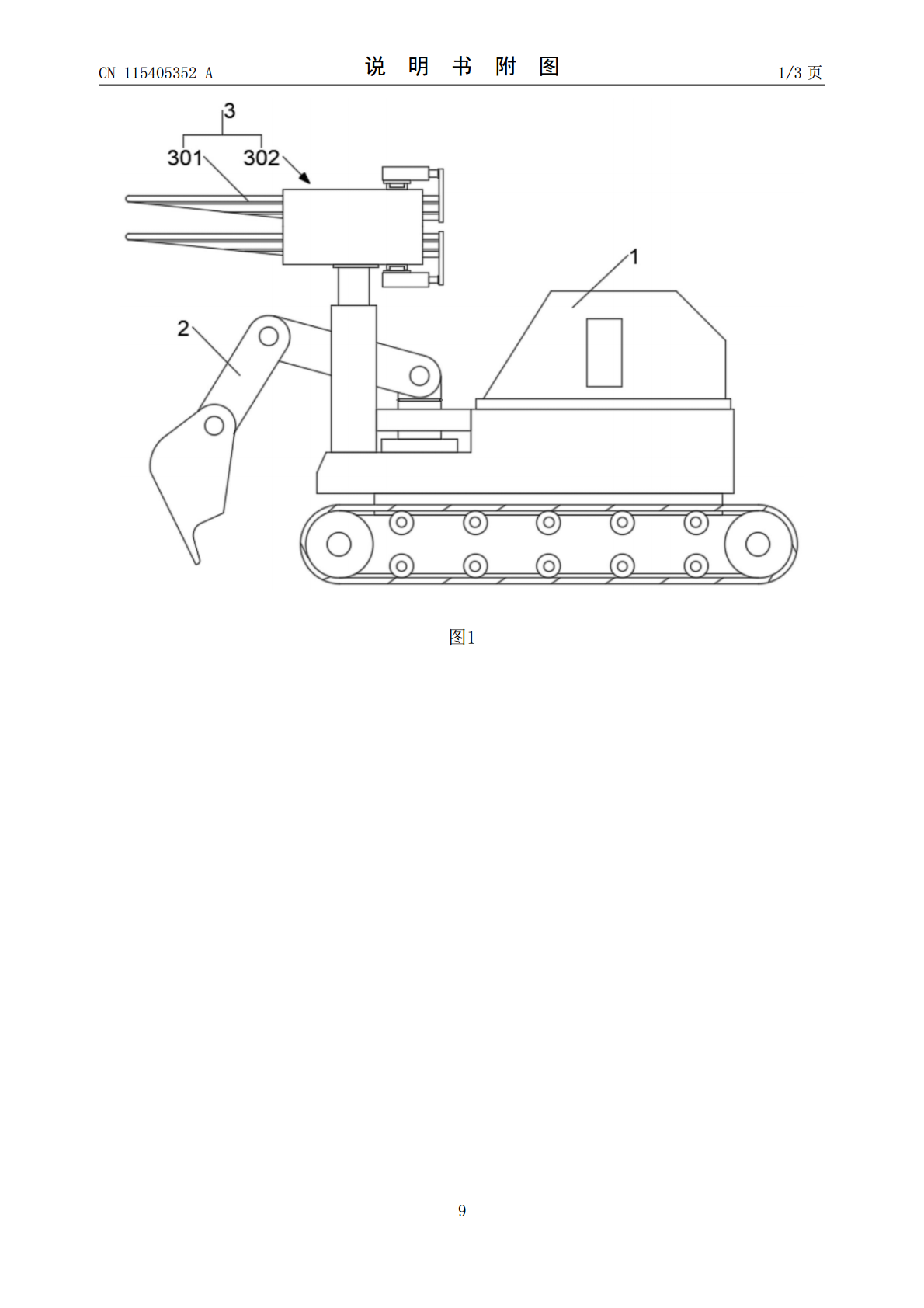
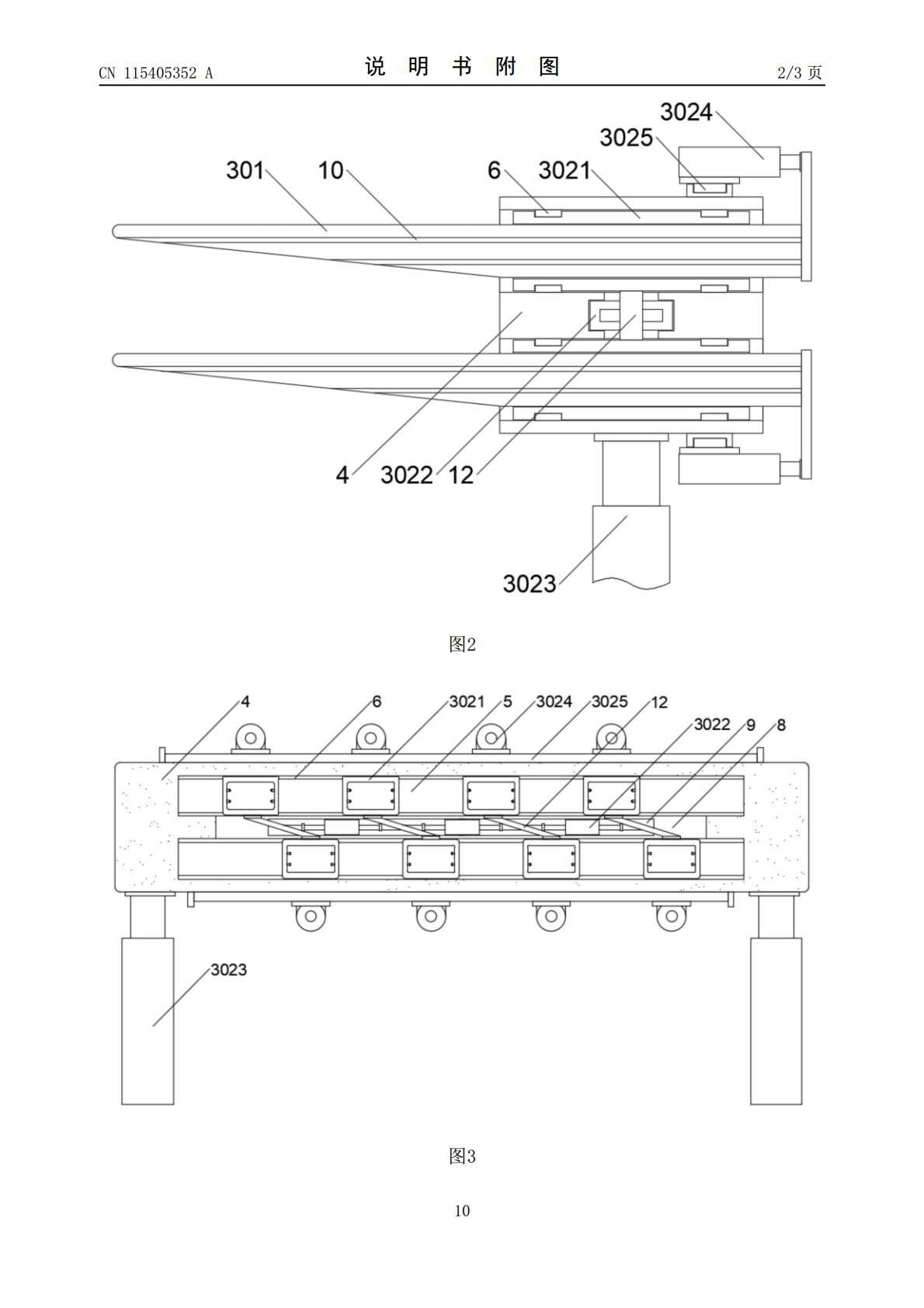
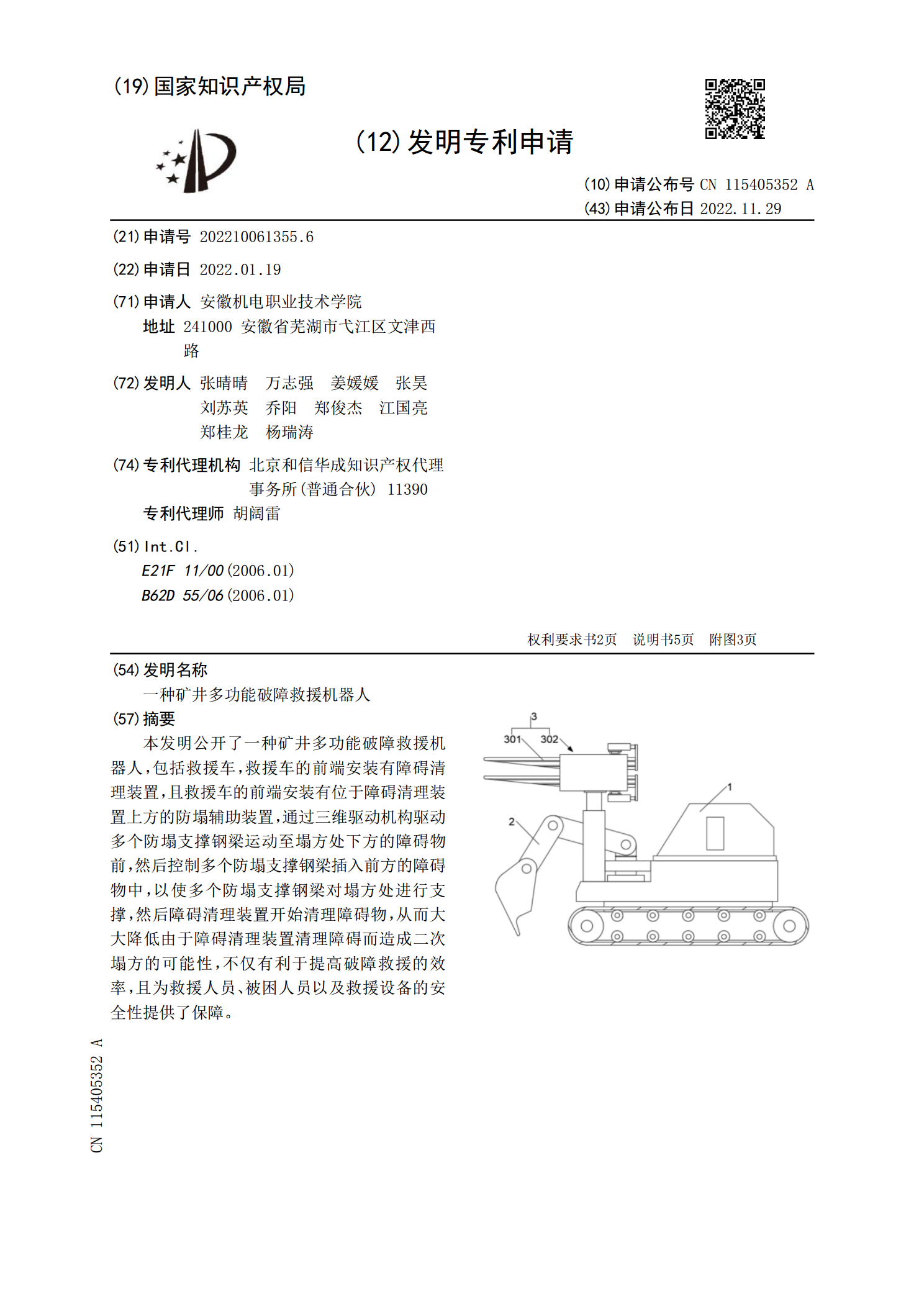
本发明公开了一种矿井多功能破障救援机器人,包括救援车,救援车的前端安装有障碍清理装置,且救援车的前端安装有位于障碍清理装置上方的防塌辅助装置,通过三维驱动机构驱动多个防塌支撑钢梁运动至塌方处下方的障碍物前,然后控制多个防塌支撑钢梁插入前方的障碍物中,以使多个防塌支撑钢梁对塌方处进行支撑,然后障碍清理装置开始清理障碍物,从而大大降低由于障碍清理装置清理障碍而造成二次塌方的可能性,不仅有利于提高破障救援的效率,且为救援人员、被困人员以及救援设备的安全性提供了保障。
一种多功能无人破障车及多功能无人破障车的控制方法.pdf
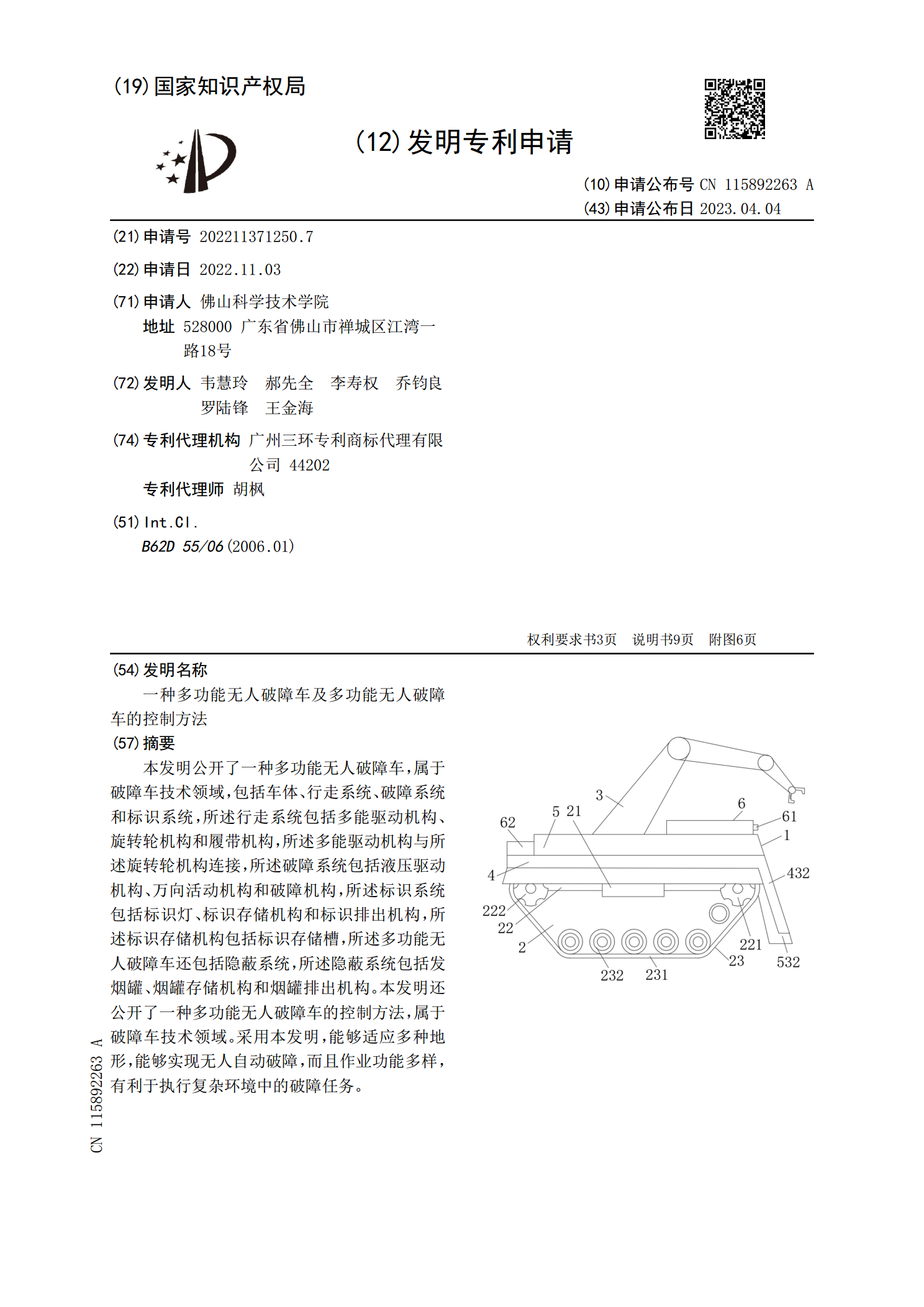
本发明公开了一种多功能无人破障车,属于破障车技术领域,包括车体、行走系统、破障系统和标识系统,所述行走系统包括多能驱动机构、旋转轮机构和履带机构,所述多能驱动机构与所述旋转轮机构连接,所述破障系统包括液压驱动机构、万向活动机构和破障机构,所述标识系统包括标识灯、标识存储机构和标识排出机构,所述标识存储机构包括标识存储槽,所述多功能无人破障车还包括隐蔽系统,所述隐蔽系统包括发烟罐、烟罐存储机构和烟罐排出机构。本发明还公开了一种多功能无人破障车的控制方法,属于破障车技术领域。采用本发明,能够适应多种地形,能够
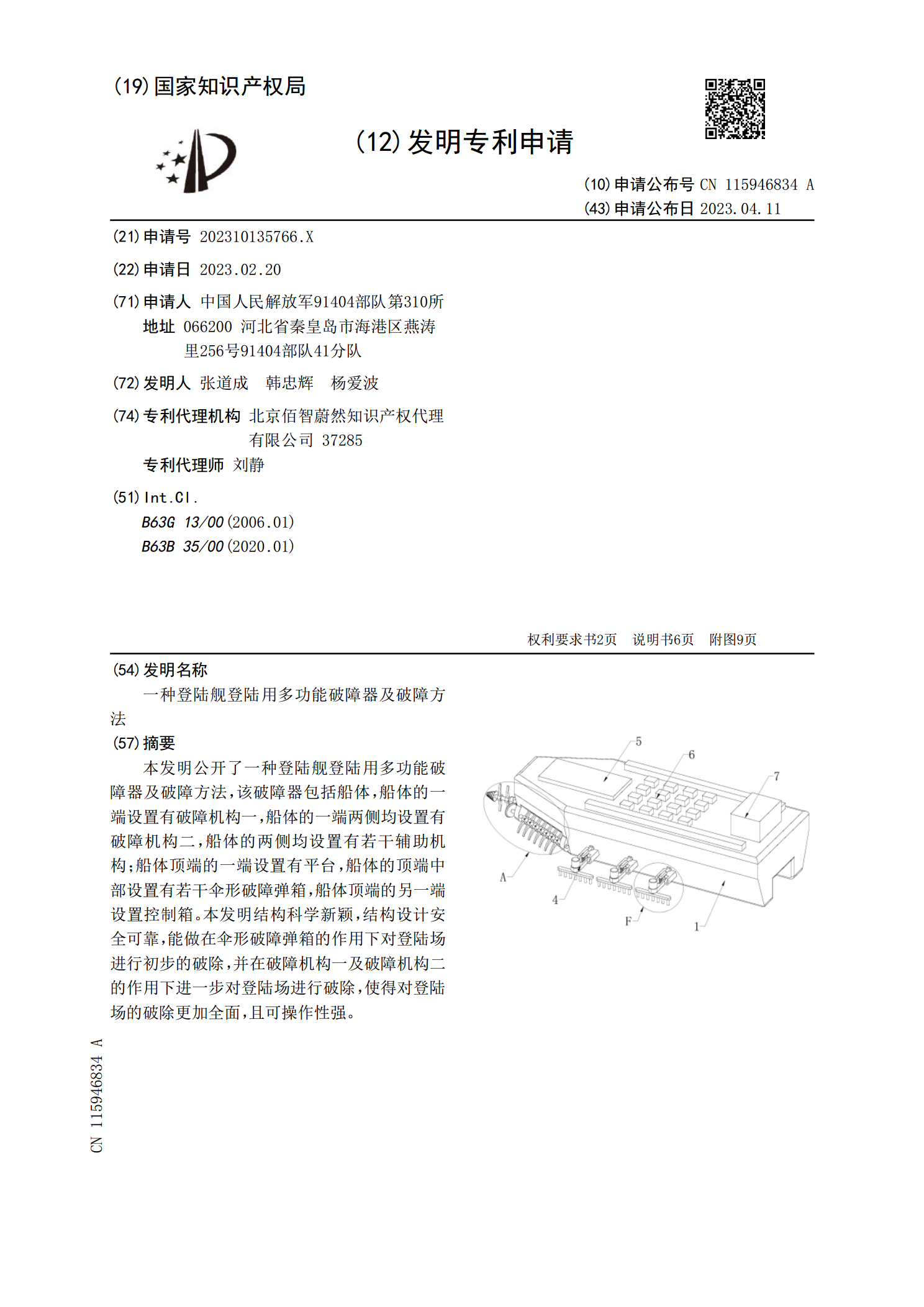
一种登陆舰登陆用多功能破障器及破障方法.pdf
本发明公开了一种登陆舰登陆用多功能破障器及破障方法,该破障器包括船体,船体的一端设置有破障机构一,船体的一端两侧均设置有破障机构二,船体的两侧均设置有若干辅助机构;船体顶端的一端设置有平台,船体的顶端中部设置有若干伞形破障弹箱,船体顶端的另一端设置控制箱。本发明结构科学新颖,结构设计安全可靠,能做在伞形破障弹箱的作用下对登陆场进行初步的破除,并在破障机构一及破障机构二的作用下进一步对登陆场进行破除,使得对登陆场的破除更加全面,且可操作性强。

步进式平动多功能破障工具.pdf
步进式多功能破障工具,包括壳体、左燕尾槽形夹头、右燕尾槽形夹头、齿条、棘轮-齿轮机构、双向棘爪式止动手柄、双向棘爪式驱动手柄,壳体上固定有手柄、驱动棘爪、止动棘爪,左燕尾槽形夹头与壳体焊固连接,右燕尾槽形夹头与齿条焊固连接,棘轮-齿轮机构、壳体、驱动手柄通过销轴形成转动副连接在一起,止动手柄通过焊接固定在壳体上,齿条的两侧通过移动副的形式与壳体连接。本发明具有携带方便、操作简单、价格低廉、外形美观等优点。
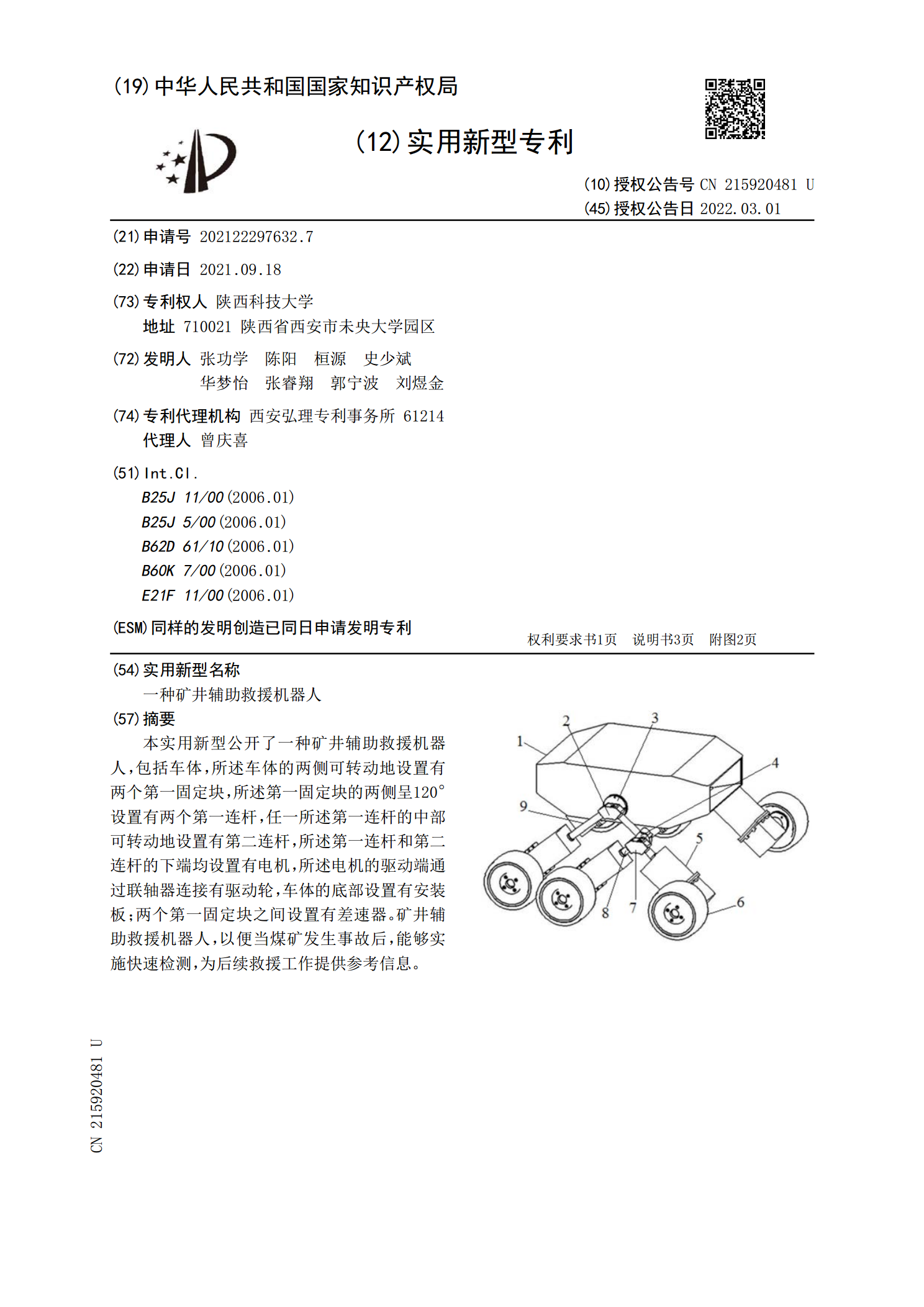
一种矿井辅助救援机器人.pdf
本实用新型公开了一种矿井辅助救援机器人,包括车体,所述车体的两侧可转动地设置有两个第一固定块,所述第一固定块的两侧呈120°设置有两个第一连杆,任一所述第一连杆的中部可转动地设置有第二连杆,所述第一连杆和第二连杆的下端均设置有电机,所述电机的驱动端通过联轴器连接有驱动轮,车体的底部设置有安装板;两个第一固定块之间设置有差速器。矿井辅助救援机器人,以便当煤矿发生事故后,能够实施快速检测,为后续救援工作提供参考信息。