
一种基于图像识别的门框定位方法及机器人.pdf

一条****发啊


1/10

2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于图像识别的门框定位方法及机器人.pdf
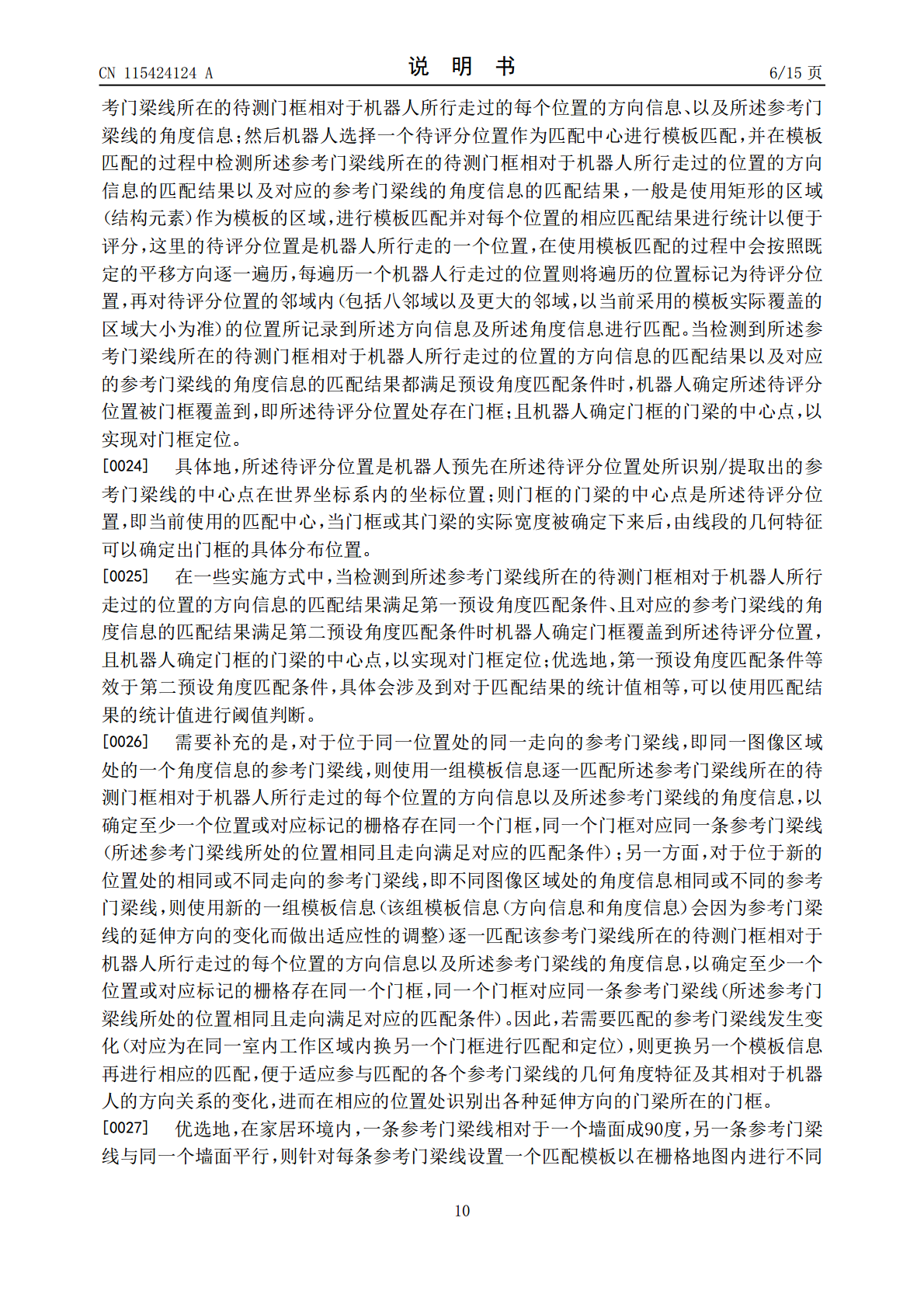
本发明公开一种基于图像识别的门框定位方法及机器人,该门框定位方法包括:机器人在室内工作区域内按照预设规划路径行走,并在行走过程中采集环境图像,再从采集到的环境图像内连接出参考门梁线,再确定参考门梁线所在的待测门框相对于机器人的位置的方向信息,并记录下来;在机器人按照预设规划路径行走完所述室内工作区域后,机器人选择一个待评分位置作为匹配中心进行模板匹配,当检测到所述参考门梁线所在的待测门框相对于机器人所行走过的位置的方向信息的匹配结果以及对应的参考门梁线的角度信息的匹配结果都满足预设角度匹配条件时,机器人确
一种基于图像识别的图像定位方法.pdf
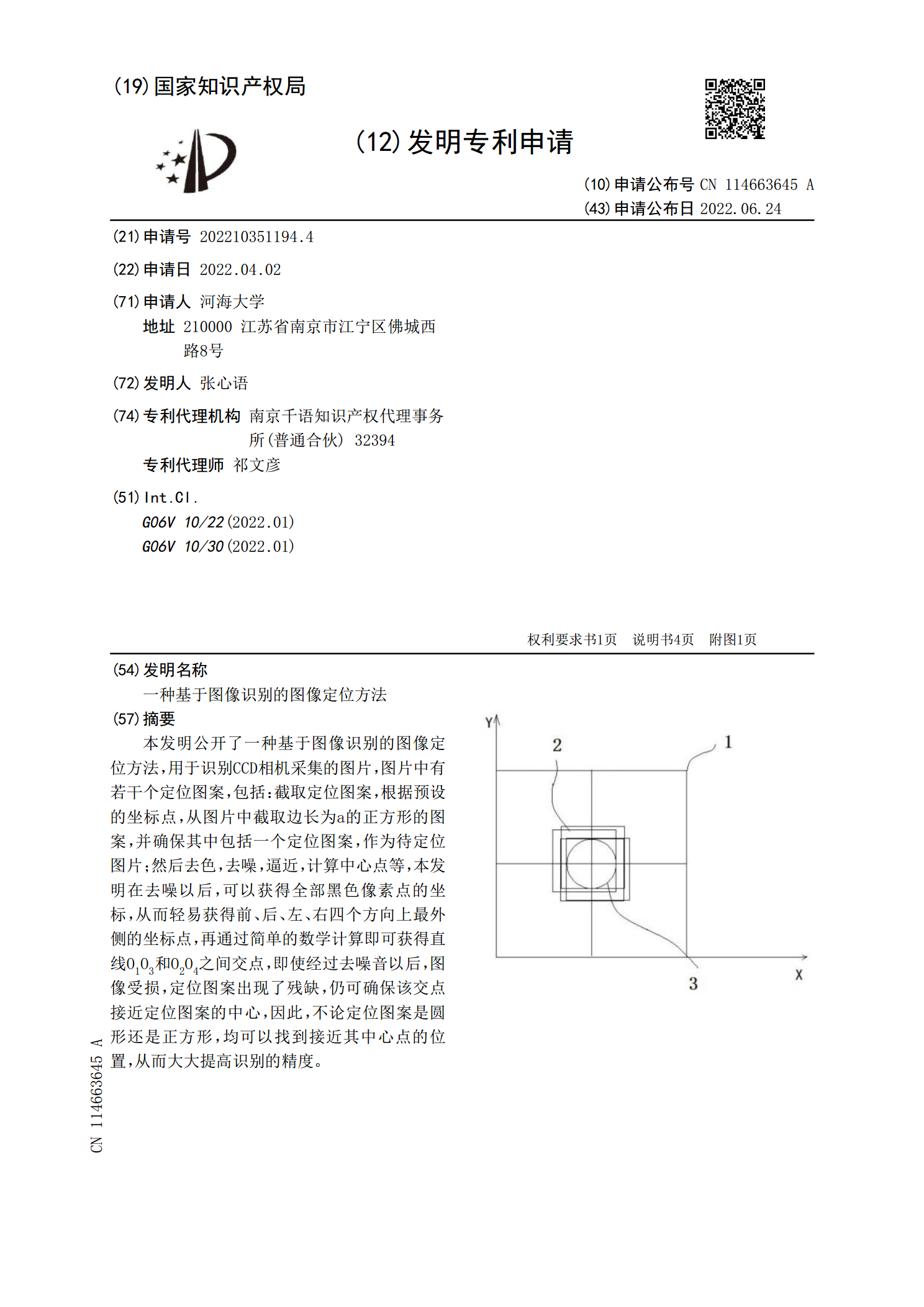
本发明公开了一种基于图像识别的图像定位方法,用于识别CCD相机采集的图片,图片中有若干个定位图案,包括:截取定位图案,根据预设的坐标点,从图片中截取边长为a的正方形的图案,并确保其中包括一个定位图案,作为待定位图片;然后去色,去噪,逼近,计算中心点等,本发明在去噪以后,可以获得全部黑色像素点的坐标,从而轻易获得前、后、左、右四个方向上最外侧的坐标点,再通过简单的数学计算即可获得直线O<base:Sub>1</base:Sub>O<base:Sub>3</base:Sub>和O<base:Sub>2</ba

一种基于图像识别的火源精准定位方法.pdf
本发明公开了一种基于图像识别的火源精准定位方法,包括以下步骤:智能消防机器人进入到火灾现场后,启动红外火焰传感器、气体烟雾传感器和温湿度传感器,测定火焰指标、烟雾指标以及温湿度指标,智能消防机器人停留在现场一段时间,并持续将数据传送给控制模块,若所有指标都在阈值范围内,则判定无火灾发生,否则,启动智能消防机器人的摄像头,对现场进行视频拍摄,将其设定为疑似火灾区域并标记疑似火灾区域的火源位置,本发明不只是采用传感器进行判断火灾区域,还通过图像识别的方法对火源信息进行再次确认,提高了火源识别的精准度并确定了火
一种基于图像识别的机器人随机巡检方法.pdf
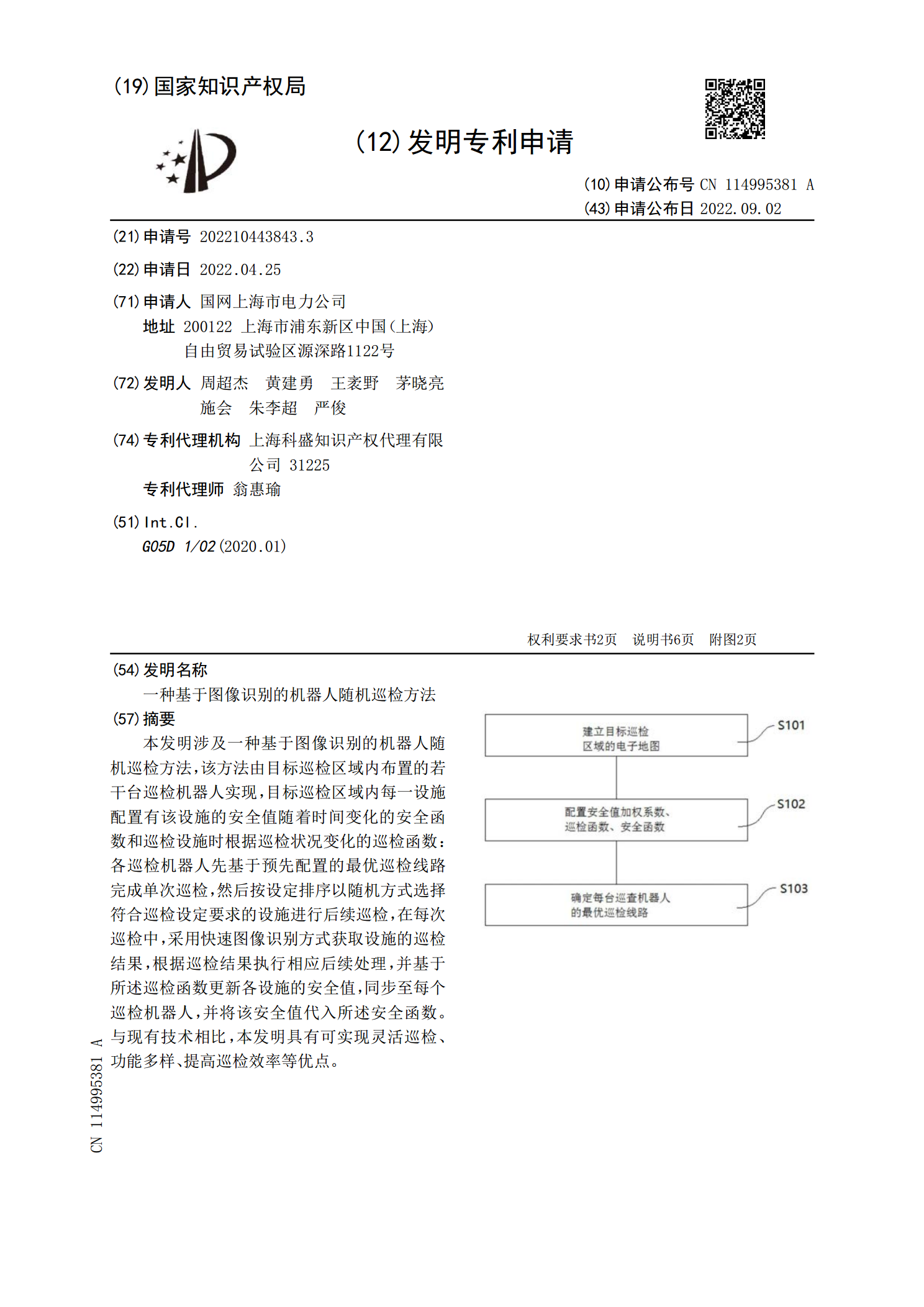
本发明涉及一种基于图像识别的机器人随机巡检方法,该方法由目标巡检区域内布置的若干台巡检机器人实现,目标巡检区域内每一设施配置有该设施的安全值随着时间变化的安全函数和巡检设施时根据巡检状况变化的巡检函数:各巡检机器人先基于预先配置的最优巡检线路完成单次巡检,然后按设定排序以随机方式选择符合巡检设定要求的设施进行后续巡检,在每次巡检中,采用快速图像识别方式获取设施的巡检结果,根据巡检结果执行相应后续处理,并基于所述巡检函数更新各设施的安全值,同步至每个巡检机器人,并将该安全值代入所述安全函数。与现有技术相比,

一种基于图像识别技术的管道机器人和控制方法.pdf
本发明公开了一种基于图像识别技术的管道机器人和控制方法,其特征在于,所述机器人包括:第一导轮、第二导轮、第三导轮和第四导轮;其特征在于,它还包括:主体部分;所述第一导轮和主体部分间通过第一连接杆相连接;所述第二导轮和主体部分间通过第二连接杆相连接;所述第三导轮和主体部分间通过第三连接杆相连接;所述第四导轮和主体部分间通过第四连接杆相连接;所述主体部分底部设置有四个相互啮合的齿轮:第一齿轮、第二齿轮、第三齿轮和第四齿轮;所述第一齿轮和第一导轮间链传动;所述第二齿轮和第二导轮间链传动;所述第三齿轮和第三导轮间