
超声电机驱动的二轴机械臂控制系统.pdf

yy****24

1/4
2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

超声电机驱动的二轴机械臂控制系统.pdf
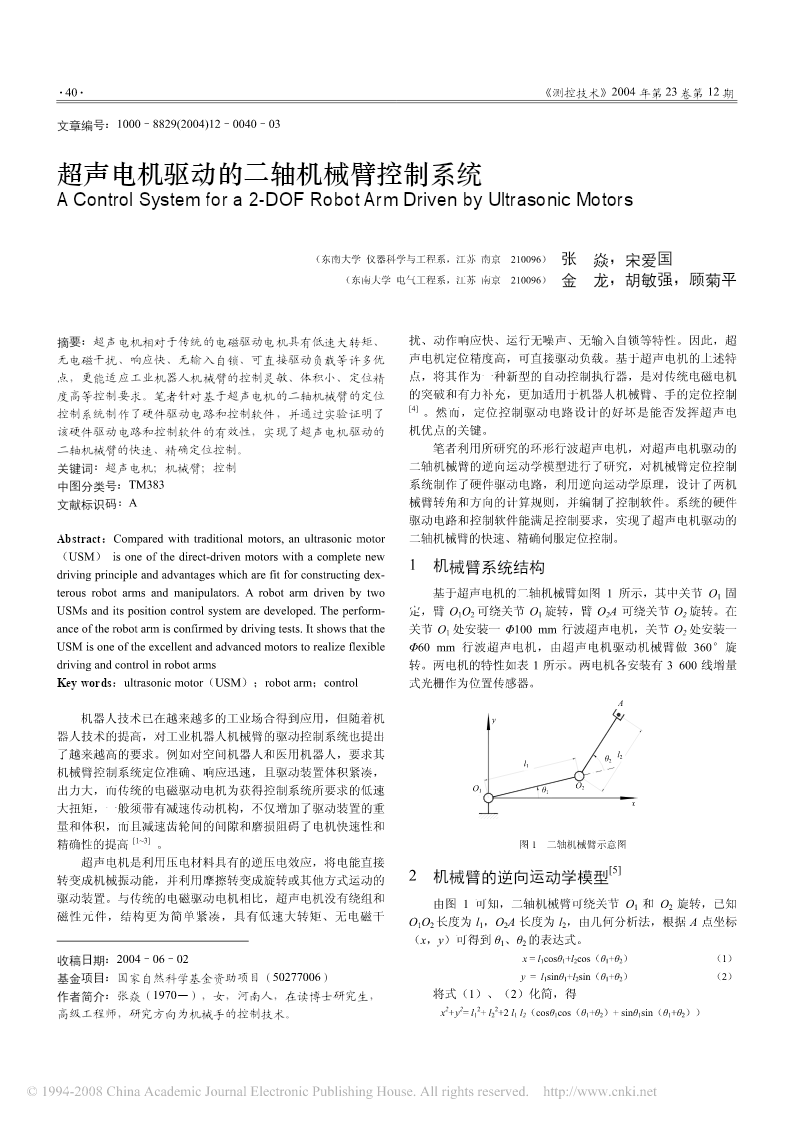
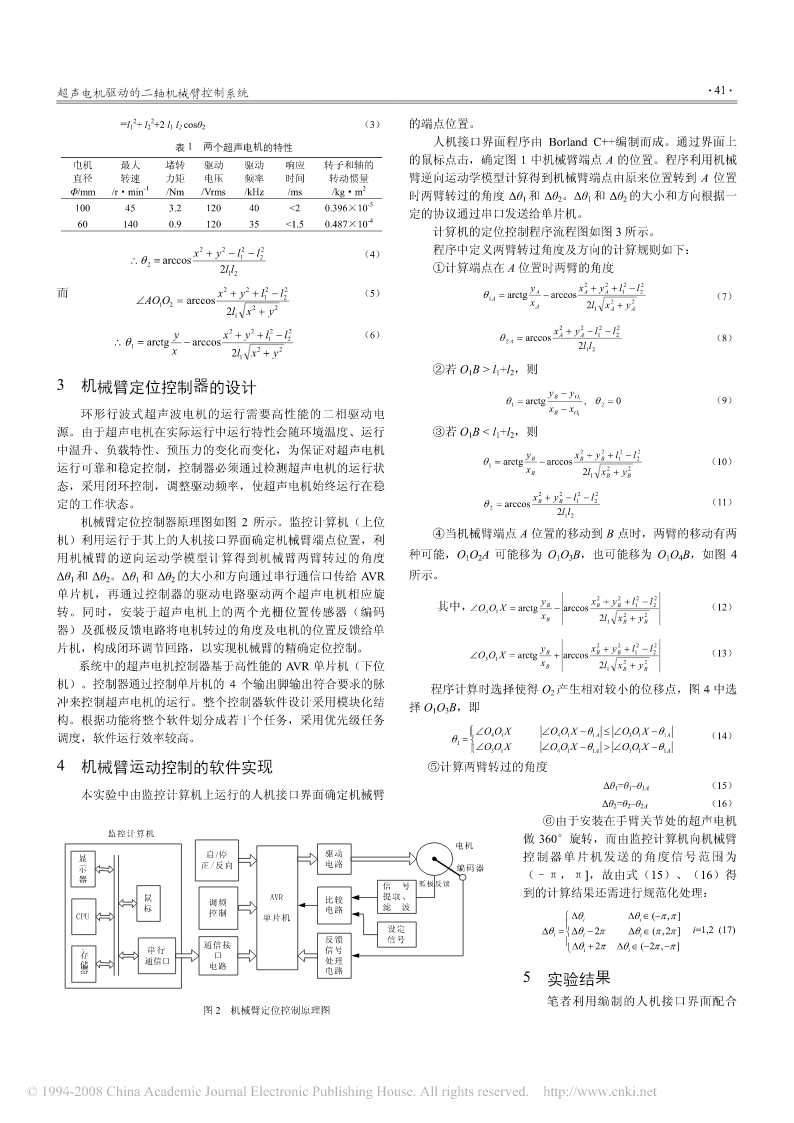
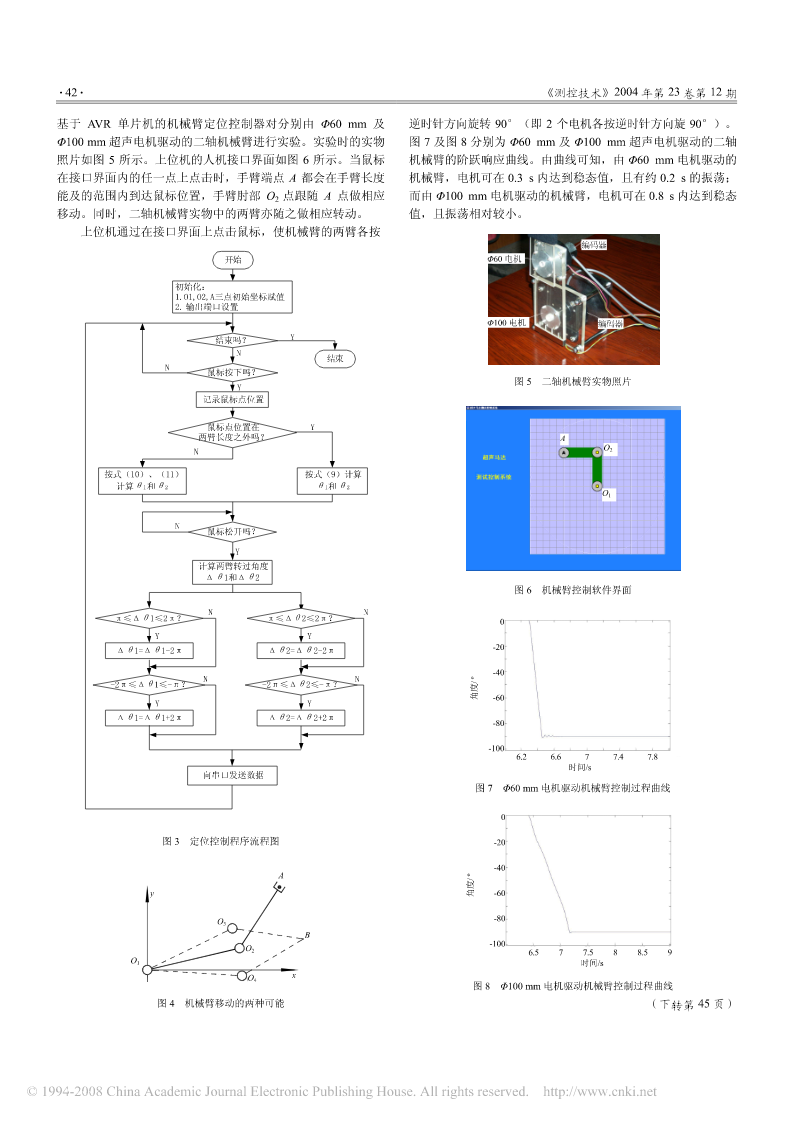
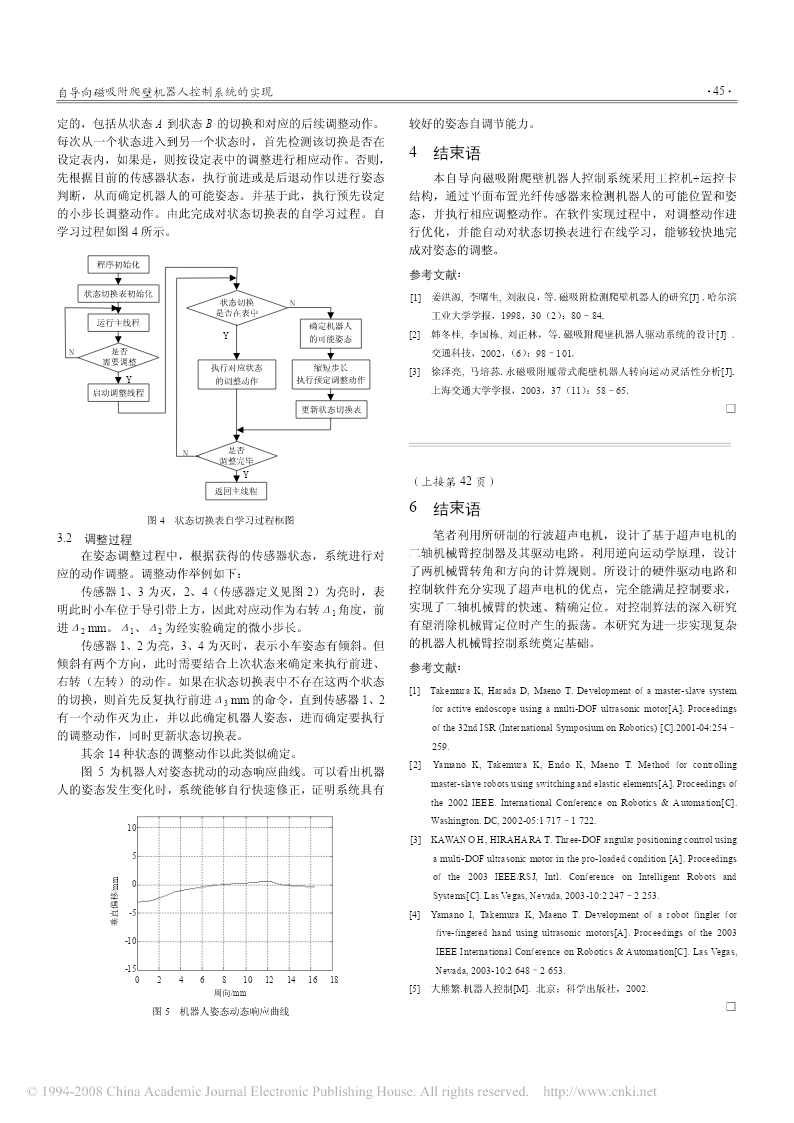
·40·《测控技术》2004年第23卷第12期文章编号:1000–8829(2004)12–0040–03超声电机驱动的二轴机械臂控制系统AControlSystemfora2-DOFRobotArmDrivenbyUltrasonicMotors(东南大学仪器科学与工程系,江苏南京210096)张焱,宋爱国(东南大学电气工程系,江苏南京210096)金龙,胡敏强,顾菊平摘要:超声电机相对于传统的电磁驱动电机具有低速大转矩、扰、动作响应快、运行无噪声、无输入自锁等特性。因此,超无电磁干扰、响应快、无输入自

一种电机驱动多轴组合机械臂系统.pdf
本发明涉及一种电机驱动多轴组合机械臂系统,包括设置于垂直方向单轴机械臂顶端的水平方向单轴机械臂,二者之间通过转轴组件活动连接并且使水平方向单轴机械臂旋转,水平方向单轴机械臂包括滚珠轴承外部的齿轮、机械臂底座上的电机驱动机构,电机驱动机构包括一蜗杆齿轮,蜗杆齿轮的齿与齿轮外圈的轮齿相啮合,使蜗杆齿轮旋转并且带动齿轮,齿轮带动水平方向单轴机械臂的转动组件进行转动。本发明可形成具有多轴工作的若干组机械臂,通过在一个单轴机械臂上安装另一个单轴机械臂,直接根据加工机床加工工艺的需要来装配单轴机械臂或多个单轴机械臂,

超声电机驱动的控制系统探讨.docx
超声电机驱动的控制系统探讨超声电机驱动的控制系统探讨摘要:超声电机是一种通过产生超声波并利用超声波与物体之间的相互作用来实现驱动的电机。相比传统电机,超声电机具有体积小、响应速度快、无电刷无磨损等优势,因此在精密定位、精密操控等领域有着广泛的应用。本论文将重点探讨超声电机驱动的控制系统。1.引言超声电机是利用压电陶瓷的介电性,将电能转变为机械能的一种电机。超声电机具有精密定位、响应速度快等优势,因此在需求精度较高的领域有着广泛的应用。超声电机的驱动控制系统是实现超声电机运动控制的核心,对超声电机的性能和运

基于超声电机的微机械臂系统.docx
基于超声电机的微机械臂系统摘要本文主要介绍基于超声电机的微机械臂系统。该系统利用超声电机作为驱动器件,实现精细的运动控制,具有高精度、高速度、低噪声等特点,能够在微小空间内实现复杂的运动任务。本文主要从超声电机技术原理、微机械臂系统设计和控制策略等方面进行了详细介绍。实验结果表明,该系统具有较好的性能和稳定性,适用于微型机械制造、生物学和医学等领域的应用。关键词:超声电机;微机械臂;运动控制;设计;控制策略1.引言微机械臂系统是一种具有广泛应用前景的微型机械设备,具有重要的研究意义和实际应用价值。在医学检

一种三轴混合驱动式机械臂.pdf
三轴混合驱动式机械臂,包括底座、支座、后臂、前臂、手掌,所述的手掌通过两个平行四边形机构构成的第一连杆机构连接支座,装在前臂连杆上的第一红外测距仪对准装在后臂连杆上的第二红外测距仪;所述的前臂和后臂内装有驱动前臂与后臂相对开合的电磁线圈驱动机构,所述的电磁线圈驱动机构包括第二连杆机构和电磁线圈;所述的支座内装有用于驱动支座绕底座旋转和后臂绕支座转动的蜗轮蜗杆式直流伺服电机;所述的支座和后臂上都装有位置传感器;所述的位置传感器、第一红外测距仪、第二红外测距仪的输出端都连接控制器的输入端,所述的蜗轮蜗杆式直流