
步进马达正反转控制doc.doc

kp****93


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

步进马达正反转控制doc.doc
步進馬達正反轉控制組員:邱維恩指導老師:陳清華日四技電機四B摘要本專題運用了雙極性驅動的步進馬達和SN8P2708AP來製作電路如圖2,並用表1的程式來達到步進馬達的控制關鍵詞:雙極性驅動的步進馬達,精密速度控制,結論1雙極性驅動的步進馬達步進馬達的驅動方式二種:單極性驅動(unipolardrive),另一為雙極性驅動(bipolardrive)。單極性驅動的控制電路比較簡單,成本低,但是因為雙線繞組所以體積比較大。雙極性驅動的優缺點剛好和單極性驅動相反,具有結構簡單,成本低的優點,但是控制電路比較複雜

步进马达控制装置、钟表和步进马达控制方法.pdf
本发明进行能量效率好的步进马达控制。步进马达控制装置通过施加通常驱动脉冲或具有比前述通常驱动脉冲更大的能量的固定脉冲,从而使步进马达驱动。该步进马达控制装置具备:判定部,其基于在前述通常驱动脉冲之前施加至前述步进马达的脉冲是否为前述固定脉冲,判定是否将消磁脉冲附加至前述通常驱动脉冲,该消磁脉冲抵消在施加前述固定脉冲时产生于前述步进马达的定子中的残留磁通;和驱动控制部,其基于前述判定部所判定的结果,通过附加了前述消磁脉冲的前述通常驱动脉冲来驱动前述步进马达。
步进马达控制装置、机芯、钟表和步进马达控制方法.pdf
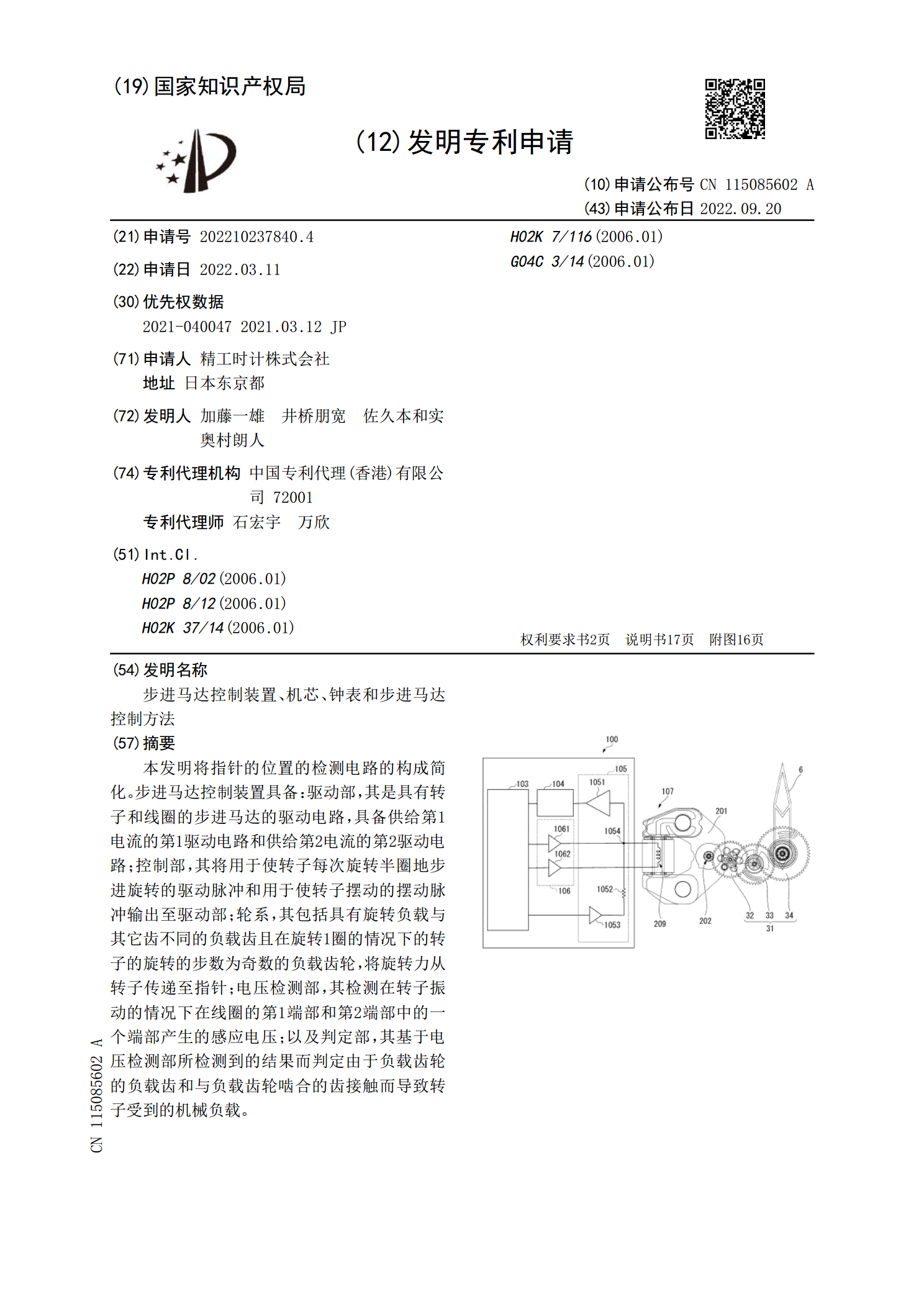
本发明将指针的位置的检测电路的构成简化。步进马达控制装置具备:驱动部,其是具有转子和线圈的步进马达的驱动电路,具备供给第1电流的第1驱动电路和供给第2电流的第2驱动电路;控制部,其将用于使转子每次旋转半圈地步进旋转的驱动脉冲和用于使转子摆动的摆动脉冲输出至驱动部;轮系,其包括具有旋转负载与其它齿不同的负载齿且在旋转1圈的情况下的转子的旋转的步数为奇数的负载齿轮,将旋转力从转子传递至指针;电压检测部,其检测在转子振动的情况下在线圈的第1端部和第2端部中的一个端部产生的感应电压;以及判定部,其基于电压检测部所

PLC控制步进电机正反转.doc
实验名称:步进电机正反转的PLC控制一、实验目的了解步进电机运转的基本原理和步进电机控制系统的基本组成,熟练运用梯形图语言进行编程,掌握用PLC控制系统控制步进电机正反转的方法。二、实验要求通过查找相关资料和教师讲解了解步进电机运转的基本原理和步进电机控制系统的基本组成;以实验室西门子SIMATICS7-200为硬件设备,认识掌握用PLC控制系统控制步进电机正反转的方法;学习STEP7-Micro/WIN4.0软件,运用梯形图语言进行编程。三、实验设备西门子SIMATICS7

伺服马达&步进马达.ppt
Servomotor&StepmotorStepmotorStepmotorServomotorServomotorStepmotor&servomotorStepmotor&servomotorACmotor&DCmotorTHANKS