
多元线性回归模型分析.pptx

kp****93


1/10
2/10

3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共82页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

多元线性回归模型分析.pptx
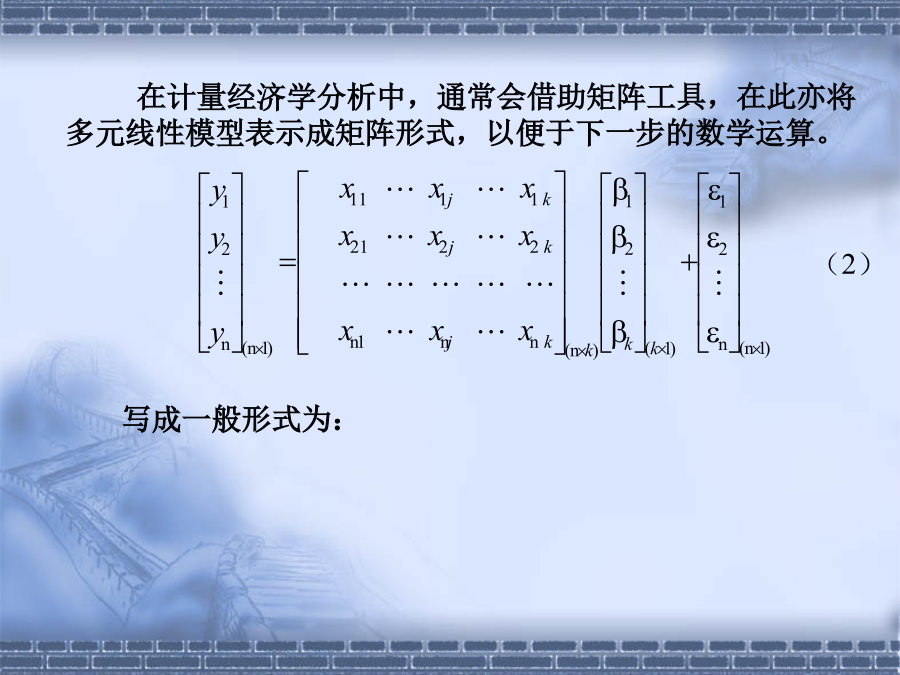
第三章多元线性回归模型**多元线性回归模型是我们课程的重点,原因在于:多元线性回归模型应用非常普遍;原理和方法是理解更复杂计量经济学模型的基础;内容较为丰富。本章主要内容§3.1多元线性回归模型的描述1、多元线性回归模型的形式以多元线性回归模型的一般形式——K元线性回归模型入手进行讲解,其模型结构如下:在研究中,我们根本无法了解式(1)所示的总体模型的特征,而只能通过样本特征来近似考察。设经过n次试验,得到n个样本,如下所示:在计量经济学分析中,通常会借助矩阵工具,在此亦将多元线性模型表示成矩阵形式,以便

多元线性回归模型案例分析.doc
多元线性回归模型案例分析——中国人口自然增长分析一·研究目的要求中国从1971年开始全面开展了计划生育,使中国总和生育率很快从1970年的5.8降到1980年2.24,接近世代更替水平。此后,人口自然增长率(即人口的生育率)很大程度上与经济的发展等各方面的因素相联系,与经济生活息息相关,为了研究此后影响中国人口自然增长的主要原因,分析全国人口增长规律,与猜测中国未来的增长趋势,需要建立计量经济学模型。影响中国人口自然增长率的因素有很多,但据分析主要因素可能有:(1)从宏观经济上看,经济整体增长是人口自然增

多元线性回归模型案例分析.doc
多元线性回归模型案例分析——中国人口自然增长分析一·研究目的要求中国从1971年开始全面开展了计划生育,使中国总和生育率很快从1970年的5.8降到1980年2.24,接近世代更替水平。此后,人口自然增长率(即人口的生育率)很大程度上与经济的发展等各方面的因素相联系,与经济生活息息相关,为了研究此后影响中国人口自然增长的主要原因,分析全国人口增长规律,与猜测中国未来的增长趋势,需要建立计量经济学模型。影响中国人口自然增长率的因素有很多,但据分析主要因素可能有:(1)从宏观经济上看,经济整体增长是人口自然增

多元线性回归模型案例分析.doc
多元线性回归模型案例分析-—中国人口自然增长分析一·研究目的要求中国从1971年开始全面开展了计划生育,使中国总和生育率很快从1970年的5.8降到1980年2.24,接近世代更替水平。此后,人口自然增长率(即人口的生育率)很大程度上与经济的发展等各方面的因素相联系,与经济生活息息相关,为了研究此后影响中国人口自然增长的主要原因,分析全国人口增长规律,与猜测中国未来的增长趋势,需要建立计量经济学模型.影响中国人口自然增长率的因素有很多,但据分析主要因素可能有:(1)从宏观经济上看,经济整体增长是人口自然增
多元线性回归模型.doc
第四章多元线性回归模型在一元线性回归模型中,解释变量只有一个。但在实际问题中,影响因变量的变量可能不止一个,比如根据经济学理论,人们对某种商品的需求不仅受该商品市场价格的影响,而且受其它商品价格以及人们可支配收入水平的制约;影响劳动力劳动供给意愿(用劳动参与率度量)的因素不仅包括经济形势(用失业率度量),而且包括劳动实际工资;根据凯恩斯的流动性偏好理论,影响人们货币需求的因素不仅包括人们的收入水平,而且包括利率水平等。当解释变量的个数由一个扩展到两个或两个以上时,一元线性回归模型就扩展为多元线性回归模型。