
台达plc伺服通信例子.doc

kp****93


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

台达plc伺服通信例子.doc
PLC通讯控制伺服电机src=http://img.gongkong.com/forum/pic/837305_1.GIF>RS、MODRD/MODWR/MODRW、CVFD的比较:RS---串行数据传输:█此指令是专为主机使用RS-485串联通讯接口所提供的便利指令。在程序中可以无限使用RS指令,但不可同一时间执行两个以上的RS指令。█接口设备(变频器,温度控制器…)如果配备RS-485串行通讯,并且该设备的通讯格式也有公开就可以由PLC的使用者以RS指令设计程序来传输PLC与接口设备的数据。█此指令的
台达PLC控制伺服说明.pdf
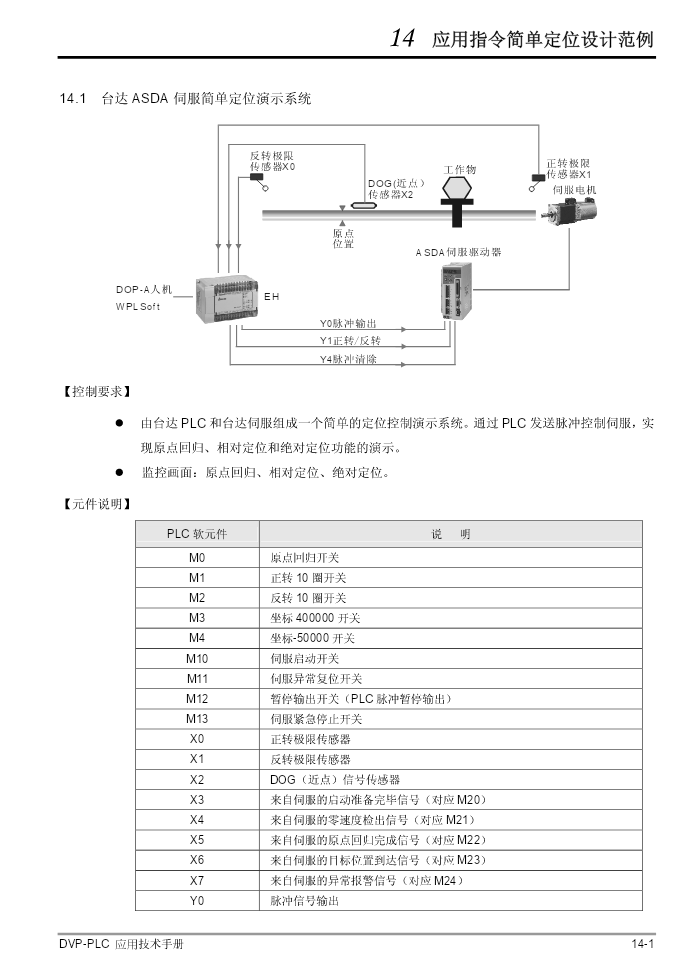
14应用指令简单定位设计范例14.1台达ASDA伺服简单定位演示系统反转极限正转极限传感器X0工作物传感器X1DOG(近点)伺服电机传感器X2原点位置ASDA伺服驱动器DOP-A人机EHWPLSoftY0脉冲输出Y1正转/反转Y4脉冲清除【控制要求】z由台达PLC和台达伺服组成一个简单的定位控制演示系统。通过PLC发送脉冲控制伺服,实现原点回归、相对定位和绝对定位功能的演示。z监控画面:原点回归、相对定位、绝对定位。【元件说明】PLC软元件说明M0原点回归开关M1正转10圈开关M2反转10圈开关M3坐标4

台达PLC通讯控制伺服教程ppt课件.ppt
台达PLC以Canopen控制伺服SDO设置;p3-06(伺服DI来源设定3F1F)SDO自动POD设置;写;P4-05(JOG手动控制)RX1400属性设置为异步255P4-07(DI控制外部端子控制P2-10—P2-17设定端子功能)RX1401以下属性设置为同步P5-05(回零第一段速)RX1401P5-75(运行速度)RX1401P6-03(运行位置)RX1402P6-21(待机位置)RX1402读;P0-01(伺服报警)TX1800P0-09(伺服当前位置)TX1800P4-07(DI伺服实计状
台达PLC通信协议ModbusASCIIDVP.doc
台达PLC通信协议ModbusASCII(DVP)编撰:李浩特日期:2023/11/12版本:Ver:3.2例1:读D0(地址为1000H)寄存器数据-------------------------------2例2:读D0-D8(D0地址为1000H,D8地址为1008H)寄存器数据----------3例3:把0010H写入D0数据寄存器------------------------------------4例4:写D10-D17数据寄存器-----------------------------
台达PLC通信协议ModbusASCIIDVP.doc
台达PLC通信协议ModbusASCII(DVP)编撰:李浩特日期:2023/11/12版本:Ver:3.2例1:读D0(地址为1000H)寄存器数据-------------------------------2例2:读D0-D8(D0地址为1000H,D8地址为1008H)寄存器数据----------3例3:把0010H写入D0数据寄存器------------------------------------4例4:写D10-D17数据寄存器-----------------------------