
松下A5伺服电机驱动器调试步骤.docx

kp****93


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

松下A5伺服电机驱动器调试步骤.docx
松下A5伺服电机驱动器调试步骤A:对于没有使用X5的调试步骤:(驱动器开环模式)应用中松下A5驱动器处于位置控制模式,需要调整的参数:参数值定义调整方法Pr0.010控制模式(0为位置控制模式)默认为0,不用改;Pr0.02先1后0设定是否自动调整;1自动,0非自动默认为1,让机台跑一段时间后设为0;Pr0.0310~16设定机台刚性从低到高调整,振动则减小;Pr0.050或1设定脉冲输入方式0:500Kbps(光电)1:4Mbps(长线)需要很高速度时可设为1,接线及计算方法参考后面Pr0.060设定指

松下A5伺服电机驱动器调试步骤.docx
松下A5伺服电机驱动器调试步骤A:对于没有使用X5的调试步骤:(驱动器开环模式)应用中松下A5驱动器处于位置控制模式,需要调整的参数:参数值定义调整方法Pr0.010控制模式(0为位置控制模式)默认为0,不用改;Pr0.02先1后0设定是否自动调整;1自动,0非自动默认为1,让机台跑一段时间后设为0;Pr0.0310~16设定机台刚性从低到高调整,振动则减小;Pr0.050或1设定脉冲输入方式0:500Kbps(光电)1:4Mbps(长线)需要很高速度时可设为1,接线及计算方法参考后面Pr0.060设定指
松下A5伺服驱动器IF口接脚详解.pdf
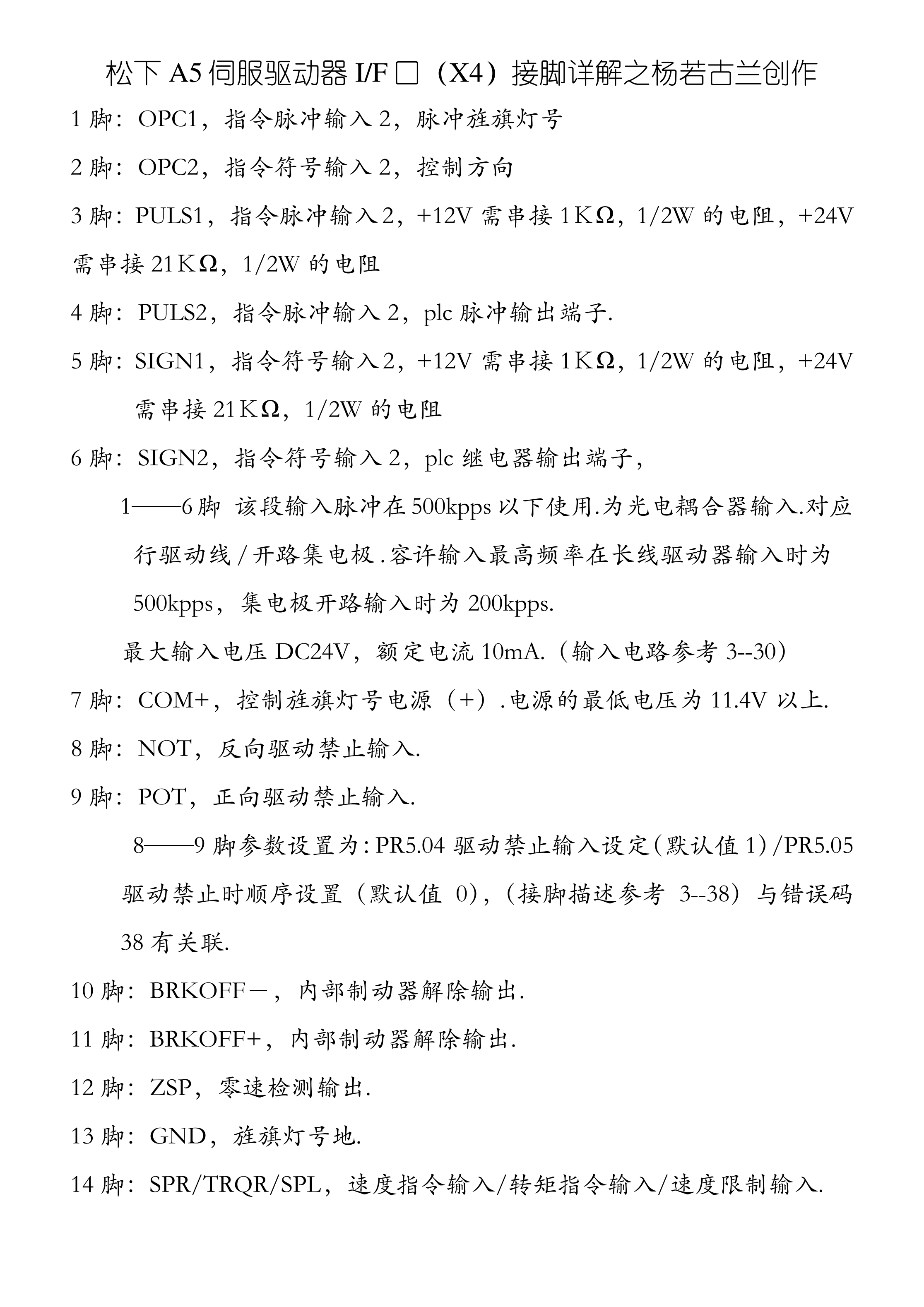
松下A5伺服驱动器I/F口(X4)接脚详解之杨若古兰创作1脚:OPC1,指令脉冲输入2,脉冲旌旗灯号2脚:OPC2,指令符号输入2,控制方向3脚:PULS1,指令脉冲输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻4脚:PULS2,指令脉冲输入2,plc脉冲输出端子.5脚:SIGN1,指令符号输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻6脚:SIGN2,指令符号输入2,plc继电器输出端子,1——6脚该段输入脉冲在500kpps以

松下伺服电机A5用户手册日弘忠信讲解.doc
松下伺服电机A5用户手册日弘忠信讲解您身边的传动专家日弘忠信,成立于1997年,是一家集品牌代理、产品配套、解决方案、工程服务于一体的运营服务商。下面简单讲解关于松下伺服电机A5用户手册的相关事项:1、松下伺服电机A5安全注意事项:警告显示的种类与含义在进行安装、配线施工、保养、检查之前,请熟读本手册。请您在对机器的知识、安全信息以及注意事项进行确认的基础上再进行使用。本手册中,对安全方面的注意事项等级分为"警告"和"注意"。警告:如果错误使用,将导致发生危险状况,有可能会导致死亡或者重伤。注意:如果错误

松下伺服调试参数.pdf
松下A5系列伺服参数一、松下MINASA5系列伺服驱动器参数设定:用松下MINASA5系列伺服驱动器,设定以下参数后,机床即可工作。但是,为优化机床性能,请详细参阅伺服驱动器技术资料。参数号功能设定值设定值说明Pr5.28*LED初始状态6通过设置此参数来监测脉冲数的接发是否正确。在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。(该参数为指令脉冲总和)Pr0.01*控制方式选择00:位置控制1:速度控制2:转矩控制Pr0.02设定实时自动调整调试设定0:无