
松下A5伺服驱动器IF口接脚详解.pdf

文库****品店

1/4
2/4
3/4
4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
松下A5伺服驱动器IF口接脚详解.pdf
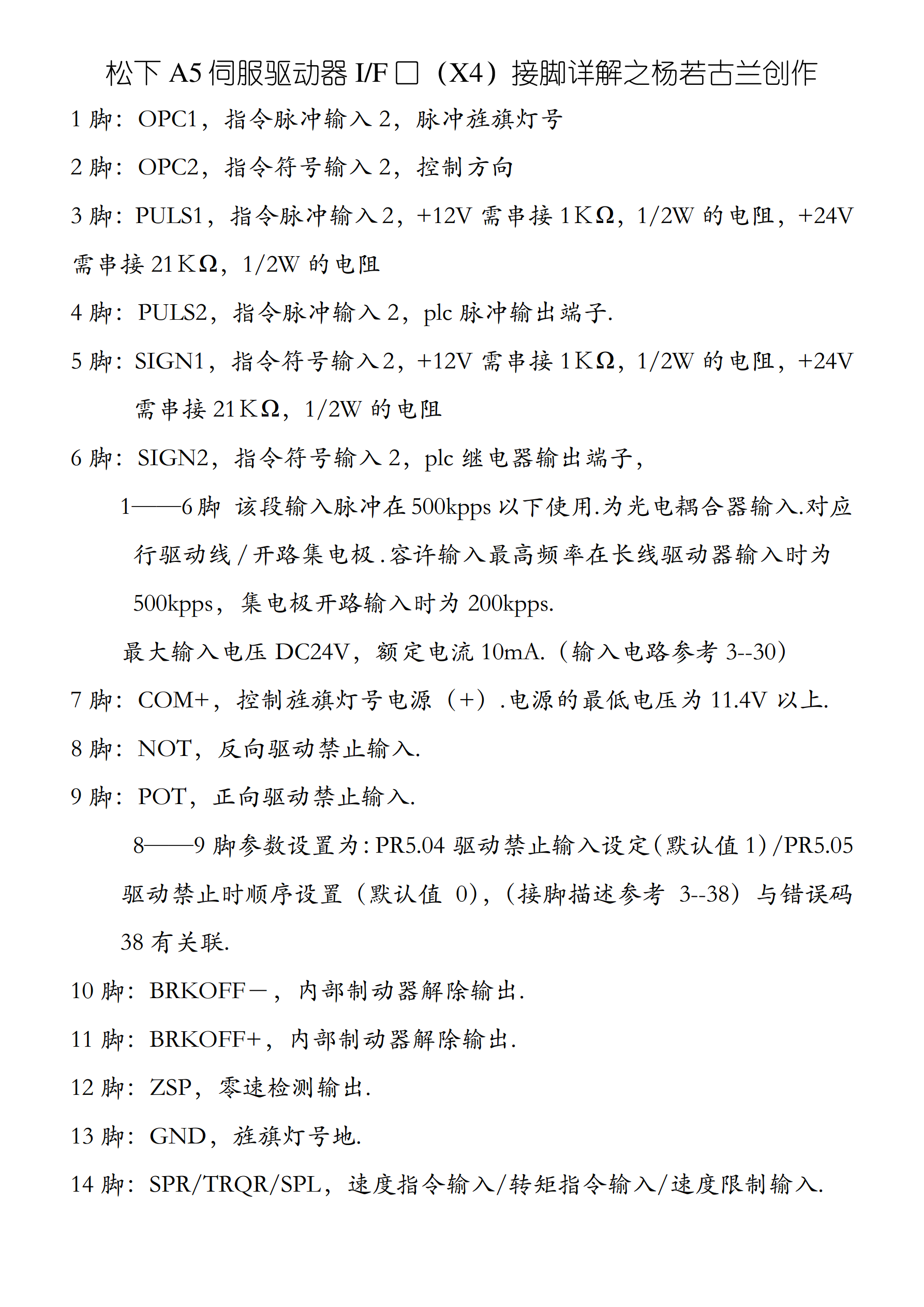
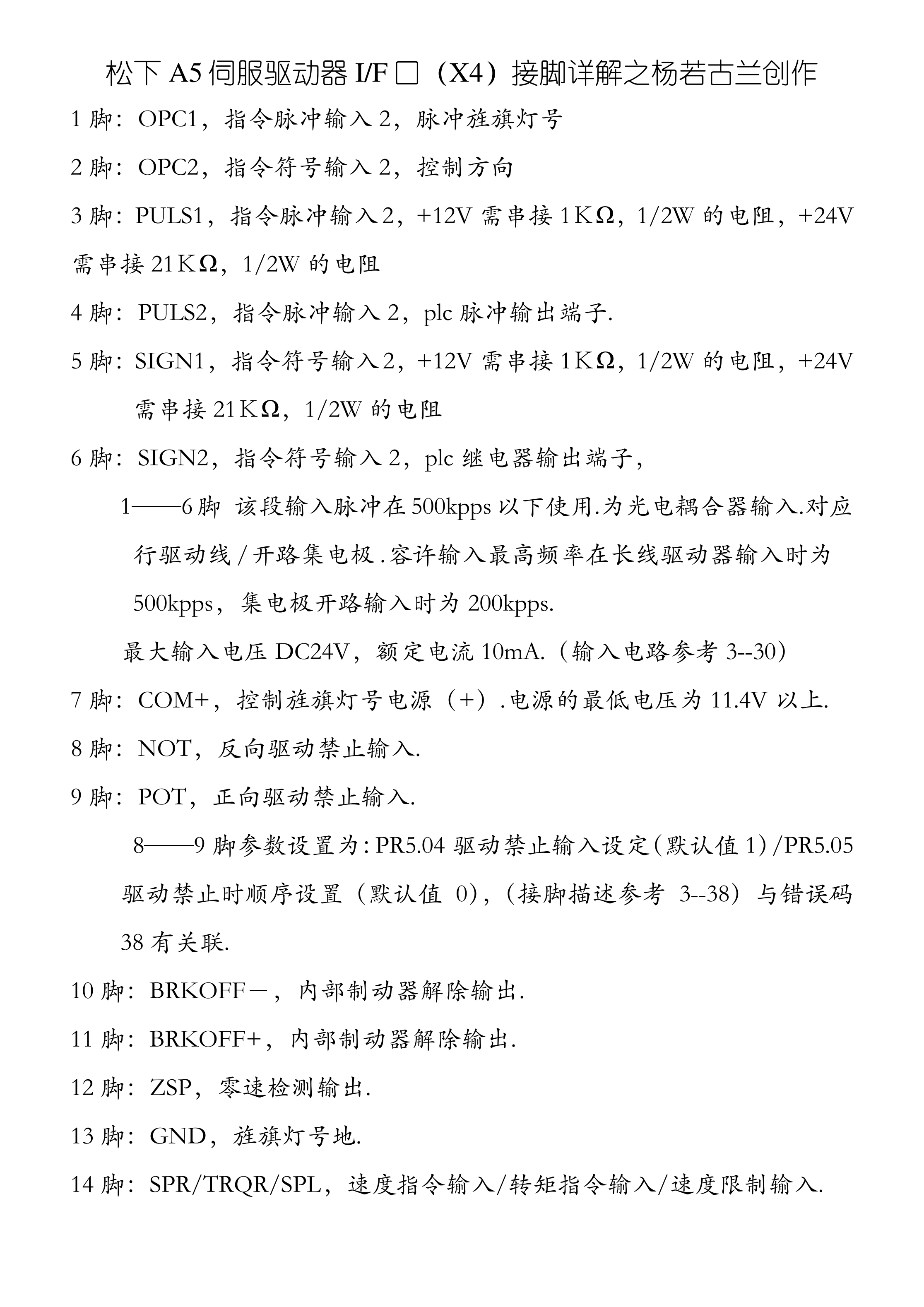
松下A5伺服驱动器I/F口(X4)接脚详解之杨若古兰创作1脚:OPC1,指令脉冲输入2,脉冲旌旗灯号2脚:OPC2,指令符号输入2,控制方向3脚:PULS1,指令脉冲输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻4脚:PULS2,指令脉冲输入2,plc脉冲输出端子.5脚:SIGN1,指令符号输入2,+12V需串接1KΩ,1/2W的电阻,+24V需串接21KΩ,1/2W的电阻6脚:SIGN2,指令符号输入2,plc继电器输出端子,1——6脚该段输入脉冲在500kpps以

松下A5伺服电机驱动器调试步骤.docx
松下A5伺服电机驱动器调试步骤A:对于没有使用X5的调试步骤:(驱动器开环模式)应用中松下A5驱动器处于位置控制模式,需要调整的参数:参数值定义调整方法Pr0.010控制模式(0为位置控制模式)默认为0,不用改;Pr0.02先1后0设定是否自动调整;1自动,0非自动默认为1,让机台跑一段时间后设为0;Pr0.0310~16设定机台刚性从低到高调整,振动则减小;Pr0.050或1设定脉冲输入方式0:500Kbps(光电)1:4Mbps(长线)需要很高速度时可设为1,接线及计算方法参考后面Pr0.060设定指

松下A5伺服电机驱动器调试步骤.docx
松下A5伺服电机驱动器调试步骤A:对于没有使用X5的调试步骤:(驱动器开环模式)应用中松下A5驱动器处于位置控制模式,需要调整的参数:参数值定义调整方法Pr0.010控制模式(0为位置控制模式)默认为0,不用改;Pr0.02先1后0设定是否自动调整;1自动,0非自动默认为1,让机台跑一段时间后设为0;Pr0.0310~16设定机台刚性从低到高调整,振动则减小;Pr0.050或1设定脉冲输入方式0:500Kbps(光电)1:4Mbps(长线)需要很高速度时可设为1,接线及计算方法参考后面Pr0.060设定指

松下伺服驱动器维修.ppt
松下伺服驱动器维修松下伺服驱动器维修(郑州)介绍松下伺服驱动器维修(郑州)流程:松下伺服驱动器的几种驱动方式通用技术规格变频器行业新的市场点
松下伺服驱动器安全操作及保养规程.pdf
松下伺服驱动器安全操作及保养规程伺服驱动器是一种广泛应用于自动化控制领域的高性能运动控制设备,松下伺服驱动器是其中的一种。为确保设备的正常运行和安全使用,需要加强对伺服驱动器的安全操作及保养,本文将详细介绍松下伺服驱动器的安全操作及保养规程。1.安全操作1.1环境条件松下伺服驱动器应在通风良好、干燥无尘、温度不超过40℃,相对湿度不超过95%的环境中使用,避免受到阳光直射及化学品、油脂等腐蚀物质的影响。1.2电源接线在进行电源接线前,应先了解松下伺服驱动器的电压、频率要求,将电源导线按照接线端子上的标记正