
爬壁机器人的设计.pdf

17****91


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

爬壁机器人的设计.pdf

爬壁机器人的设计与研究.docx
爬壁机器人的设计与研究标题:爬壁机器人的设计与研究摘要:随着科技的进步和人们对于自动化技术需求的增加,爬壁机器人逐渐成为热门的研究方向。本论文以爬壁机器人的设计与研究为课题,系统地研究了爬壁机器人的原理、结构、控制算法等关键技术,旨在为爬壁机器人的进一步发展提供参考。一、引言随着现代建筑结构的复杂化和人们对快速高效维护的需求,传统的人工维护方式已经无法满足需求。而爬壁机器人,作为一种可以自主爬行在垂直壁面的机器人,在解决高空作业和危险环境维护等方面具有巨大的潜力。二、爬壁机器人的结构设计爬壁机器人的结构设
爬壁机器人.pdf
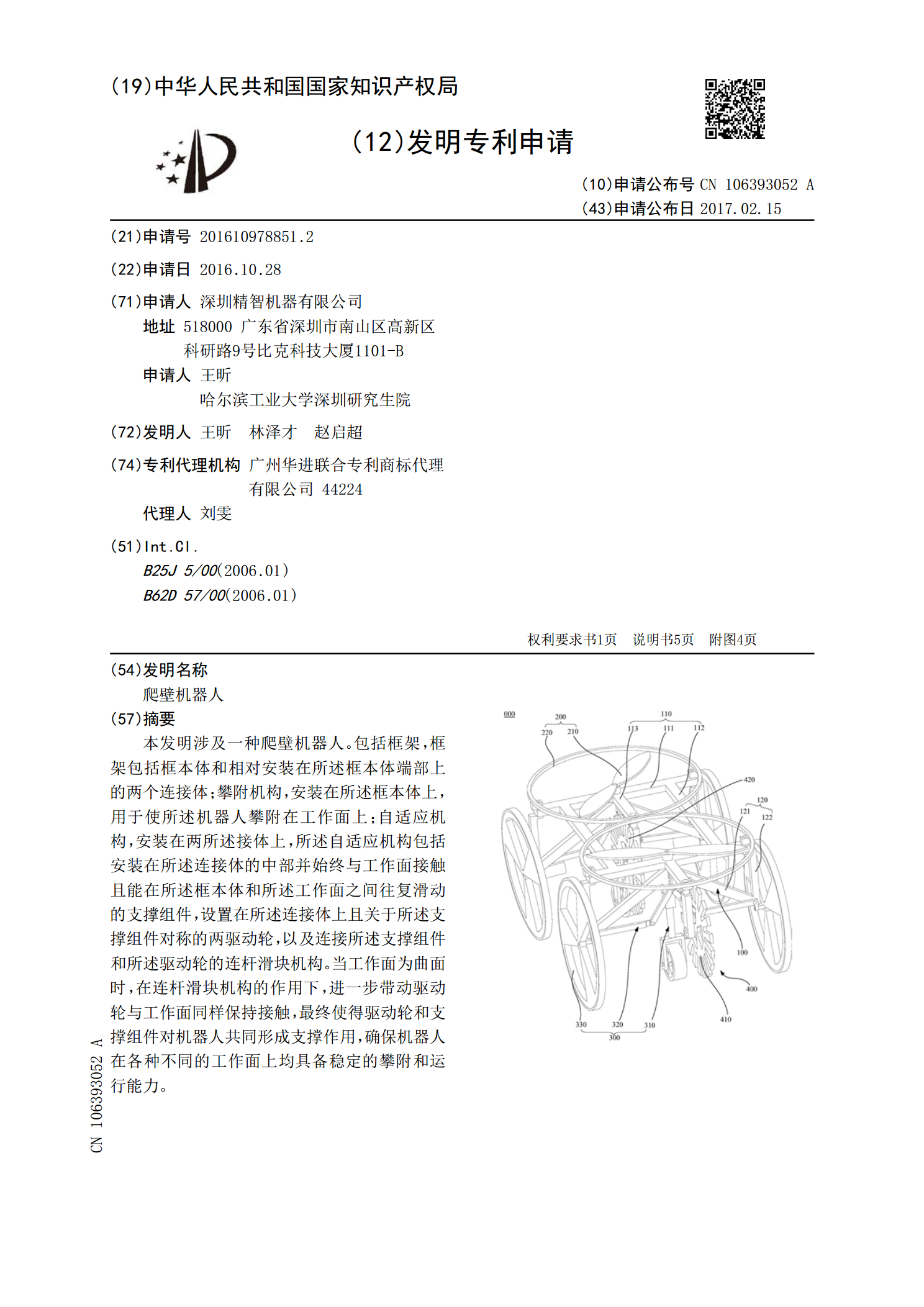
本发明涉及一种爬壁机器人。包括框架,框架包括框本体和相对安装在所述框本体端部上的两个连接体;攀附机构,安装在所述框本体上,用于使所述机器人攀附在工作面上;自适应机构,安装在两所述接体上,所述自适应机构包括安装在所述连接体的中部并始终与工作面接触且能在所述框本体和所述工作面之间往复滑动的支撑组件,设置在所述连接体上且关于所述支撑组件对称的两驱动轮,以及连接所述支撑组件和所述驱动轮的连杆滑块机构。当工作面为曲面时,在连杆滑块机构的作用下,进一步带动驱动轮与工作面同样保持接触,最终使得驱动轮和支撑组件对机器人共

爬壁机器人.pdf
本发明涉及机器人技术领域,是一种爬壁机器人,包括履带底盘和作业模块,履带底盘包括机架、履带、变磁吸附单元,履带的外壁上固定安装有不少于两个的变磁吸附单元,机架的前端和后端分别固定安装有与变磁槽轮相配合的拨杆。本发明结构合理而紧凑,使用方便,其通过拨杆与变磁槽轮的配合改变变磁吸附单元的磁力方向,进而实现变磁吸附单元与风电塔筒表面的吸附和分离,从而实现该爬壁机器人沿风电塔筒表面的行走,该爬壁机器人可对风电塔筒进行除锈、清洗和喷漆作业,维持风电塔筒表面的整洁美观,提高风机运行安全性,降低工人的劳动强度、缩短施工
爬壁机器人.pdf
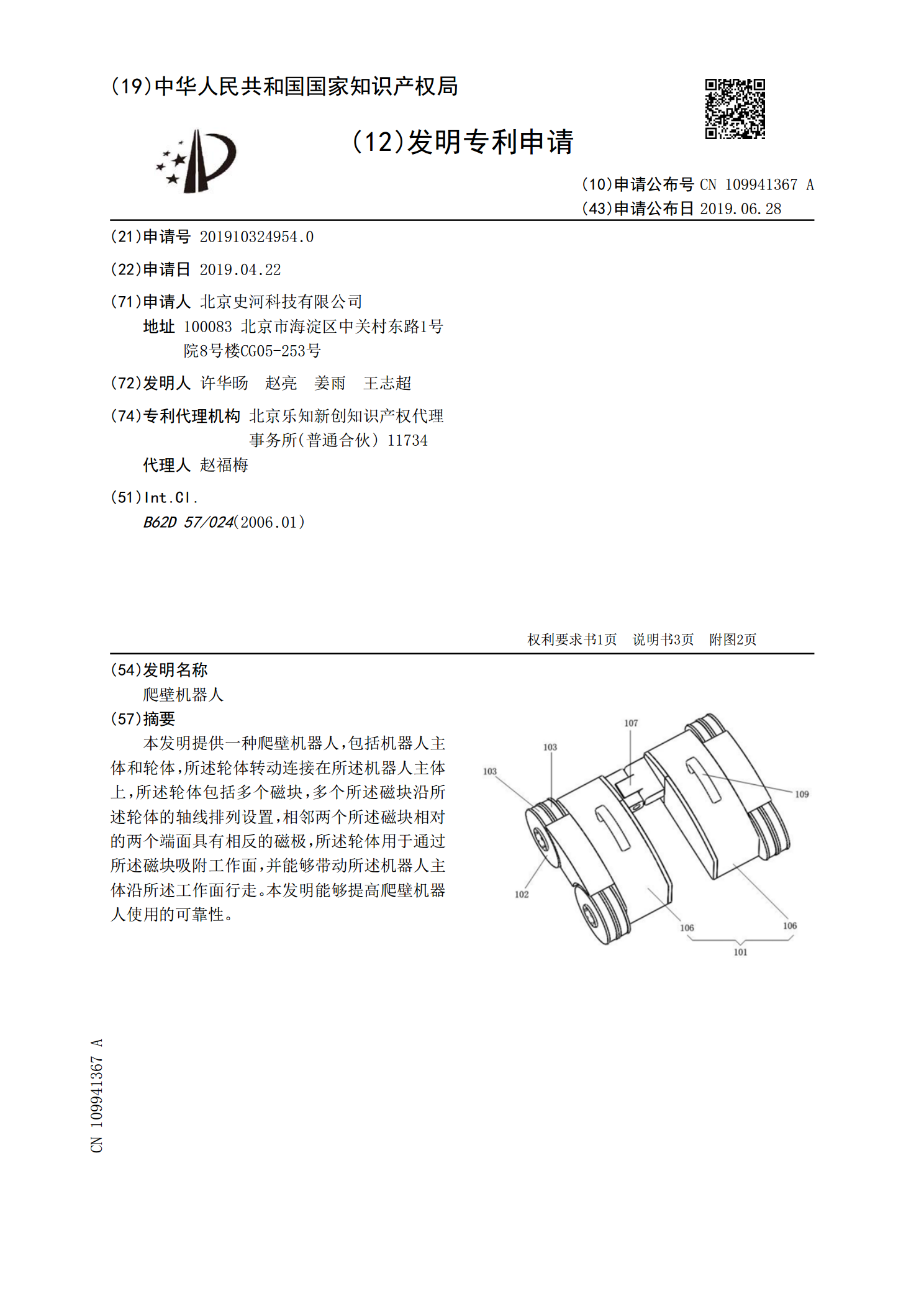
本发明提供一种爬壁机器人,包括机器人主体和轮体,所述轮体转动连接在所述机器人主体上,所述轮体包括多个磁块,多个所述磁块沿所述轮体的轴线排列设置,相邻两个所述磁块相对的两个端面具有相反的磁极,所述轮体用于通过所述磁块吸附工作面,并能够带动所述机器人主体沿所述工作面行走。本发明能够提高爬壁机器人使用的可靠性。