
机器人示教编程与离线编程的选择.docx

kp****93


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

机器人示教编程与离线编程的选择.docx
机器人示教编程与离线编程的选择随着科学技术日新月异的进步,工业机器人已成为当今工业生产上重要的组成部分,它可以很精确的完成形形色色的任务和操作。相比于人类的局限性而言它们有更为广泛的应用空间。1959年美国英格伯格和德沃尔(Devol)制造出世界上第一台工业机器人,到了七十年代后,随着计算机的发展,机器人才广泛应用于工业的生产上。随着机器人的广泛应用,机器人技术也由单一的工业生产方面进一步向各个领域延伸和应用。【小萌观点:没有更好,只有更适合】机器人的智能化发展是一个大的趋势,那么对于它是如何完成既定工作
机器人示教编程方法及机器人示教编程装置.pdf
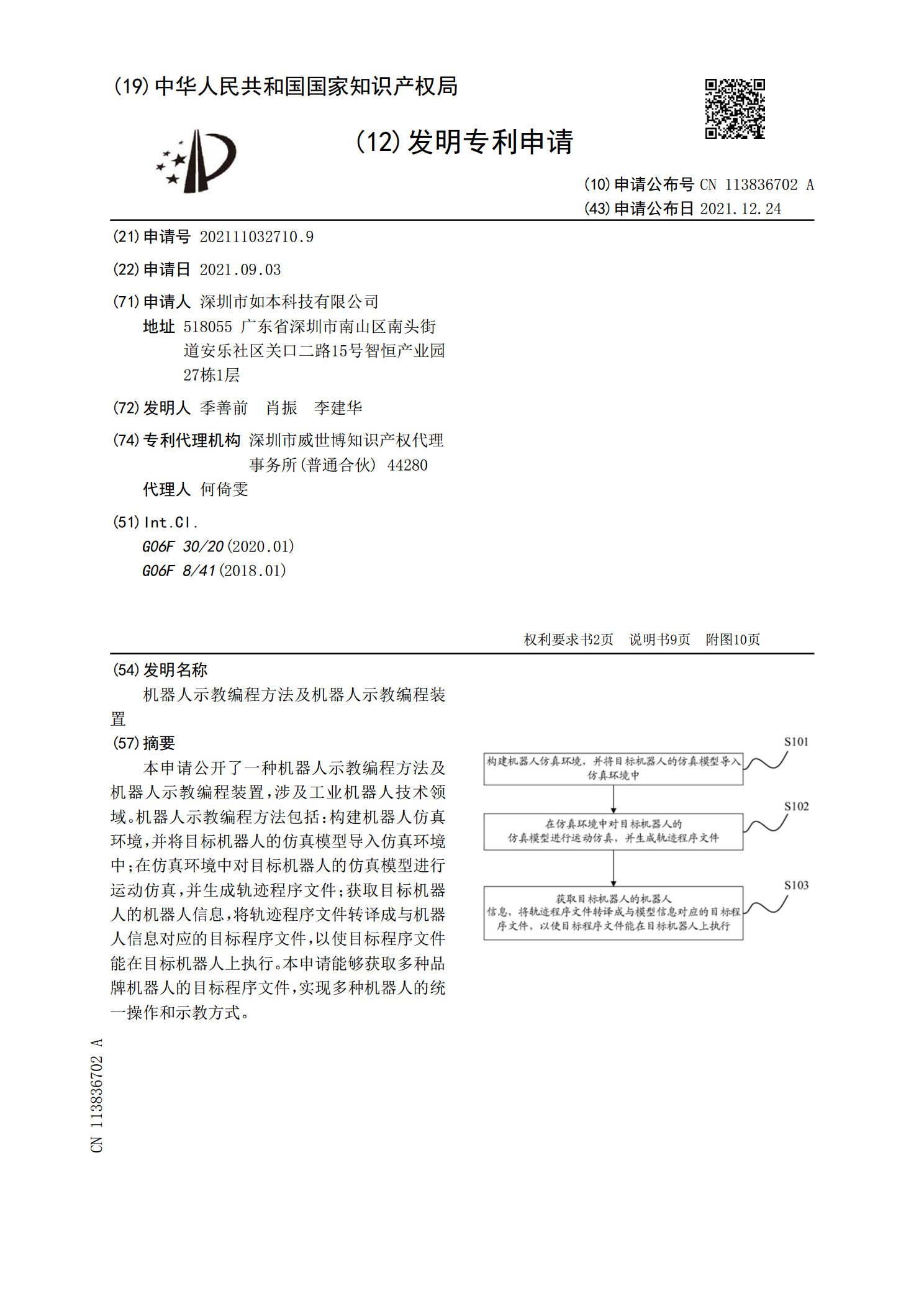
本申请公开了一种机器人示教编程方法及机器人示教编程装置,涉及工业机器人技术领域。机器人示教编程方法包括:构建机器人仿真环境,并将目标机器人的仿真模型导入仿真环境中;在仿真环境中对目标机器人的仿真模型进行运动仿真,并生成轨迹程序文件;获取目标机器人的机器人信息,将轨迹程序文件转译成与机器人信息对应的目标程序文件,以使目标程序文件能在目标机器人上执行。本申请能够获取多种品牌机器人的目标程序文件,实现多种机器人的统一操作和示教方式。

机器人示教与编程.ppt
6.6机器人编程及示教、再现山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/

机器人的离线编程.ppt
机器人编程RobotProgrammingRobotProgrammingRobotProgrammingRobotProgramming东南大学远程教育RobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRo

机器人的离线编程.ppt
机器人编程RobotProgrammingRobotProgrammingRobotProgrammingRobotProgramming东南大学远程教育RobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRobotProgrammingRo