
机器人示教编程方法及机器人示教编程装置.pdf

丹烟****魔王


1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人示教编程方法及机器人示教编程装置.pdf
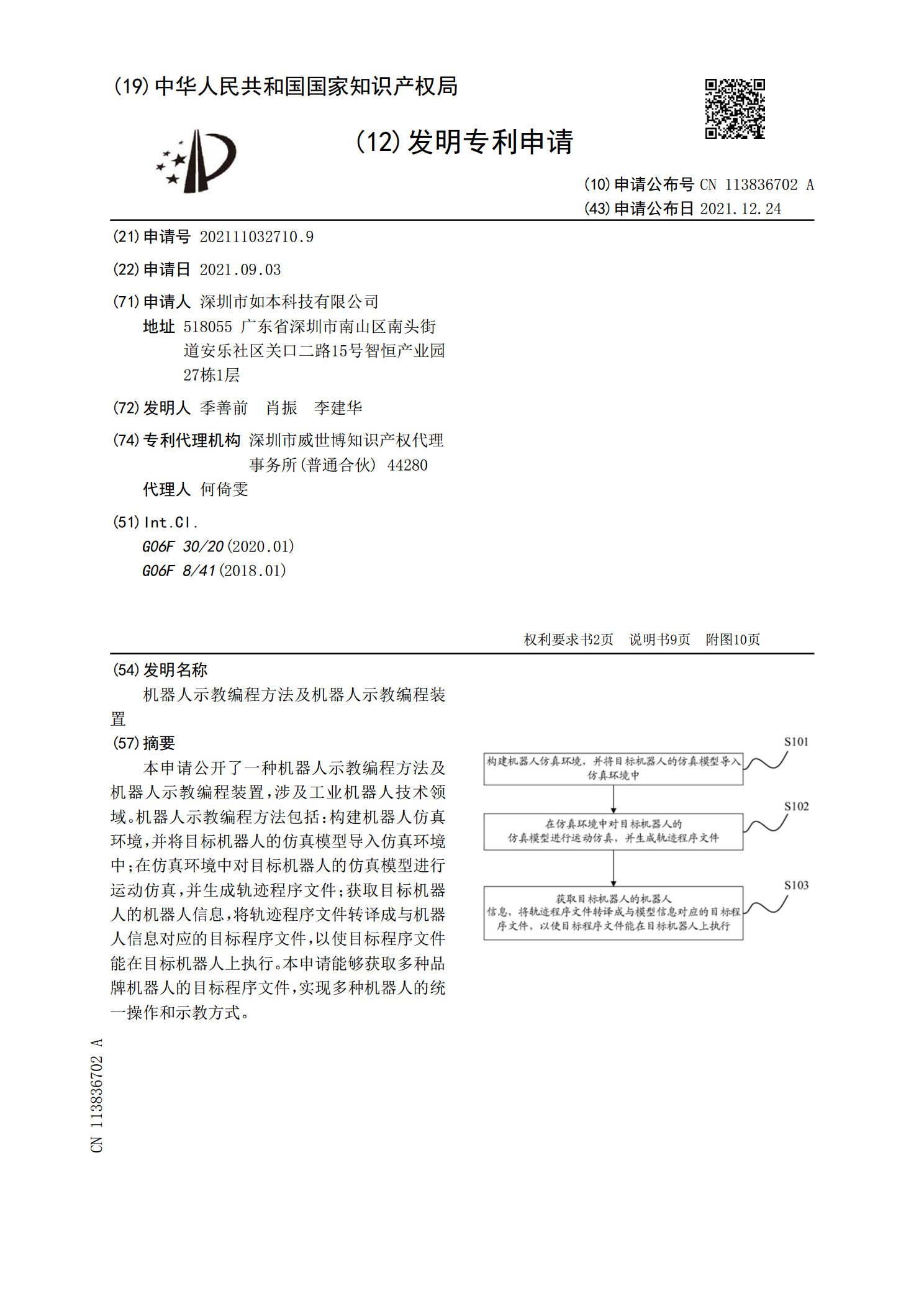
本申请公开了一种机器人示教编程方法及机器人示教编程装置,涉及工业机器人技术领域。机器人示教编程方法包括:构建机器人仿真环境,并将目标机器人的仿真模型导入仿真环境中;在仿真环境中对目标机器人的仿真模型进行运动仿真,并生成轨迹程序文件;获取目标机器人的机器人信息,将轨迹程序文件转译成与机器人信息对应的目标程序文件,以使目标程序文件能在目标机器人上执行。本申请能够获取多种品牌机器人的目标程序文件,实现多种机器人的统一操作和示教方式。

机器人示教与编程.ppt
6.6机器人编程及示教、再现山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/02山东大学机械工程学院机电工程研究所2010/09/

机器人示教编程与离线编程的选择.docx
机器人示教编程与离线编程的选择随着科学技术日新月异的进步,工业机器人已成为当今工业生产上重要的组成部分,它可以很精确的完成形形色色的任务和操作。相比于人类的局限性而言它们有更为广泛的应用空间。1959年美国英格伯格和德沃尔(Devol)制造出世界上第一台工业机器人,到了七十年代后,随着计算机的发展,机器人才广泛应用于工业的生产上。随着机器人的广泛应用,机器人技术也由单一的工业生产方面进一步向各个领域延伸和应用。【小萌观点:没有更好,只有更适合】机器人的智能化发展是一个大的趋势,那么对于它是如何完成既定工作

项目机器人示教编程.pptx
项目机器人示教编程弧焊机器人焊接时是按照事先编辑好的程序来进行的,这个程序一般是由操作人员按照焊缝形状示教机器人并记录运动轨迹而形成的。机器人的程序由主程序、子程序及程序数据构成。在一个完整的应用程序中,一般只有一个主程序,而子程序可以是一个,也可以是多个。【学习目标】任务1新建和加载程序一、示教与再现图3-1示教-再现机器人控制方式ABB机器人存储器包含应用程序和系统模块两部分。存储器中只允许存在一个主程序,所有例行程序(子程序)与数据无论存在什么位置,全部被系统共享。因此,所有例行程序与数据除特殊定以

机器人示教编程(精).pptx