
多旋翼飞行原理.docx

kp****93


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多旋翼飞行原理.docx
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图1.1所示。.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转
多旋翼飞行器原理.pdf
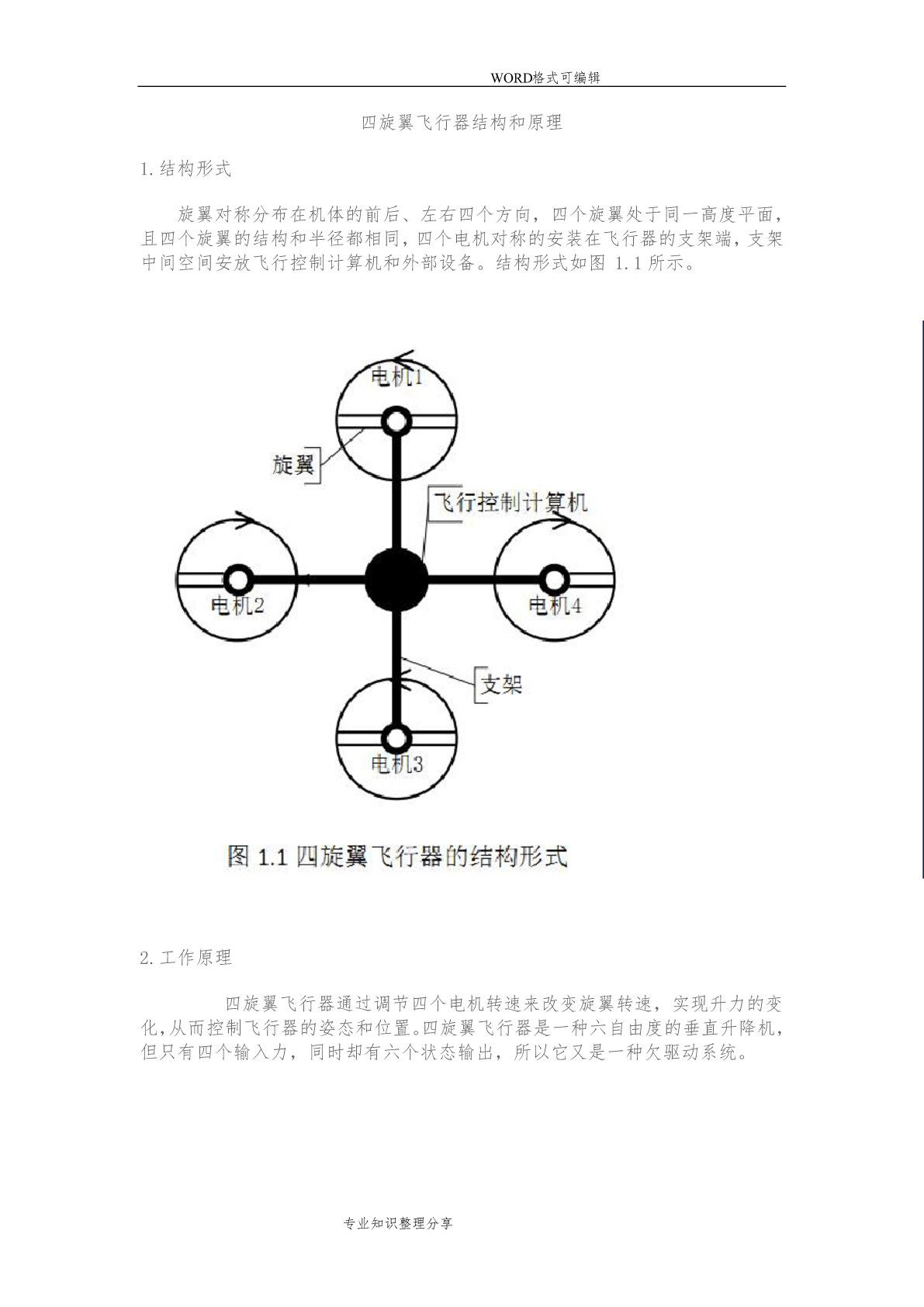
WORD格式可编辑四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图1.1所示。2.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。专业知识整理分享WORD格式可编辑四旋翼飞行器的电

多旋翼飞行器原理.docx
四旋翼飞行器结构和原理1.结构形式旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图1.1所示。2.工作原理四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。四旋翼飞行器的电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋

基于扑旋翼原理的多翼飞行器.pdf
本发明公开了一种基于扑旋翼原理的多翼飞行器,包括中心桁架和多个扑旋翼机构;扑旋翼机构包括机架、中轴、第一旋转件、第二旋转件、翼杆、翼板、俯仰驱动杆和直线驱动组件;第一旋转件安装在机架上,翼杆的一端铰接第一旋转件,翼板安装在翼杆上,中轴安装在机架上,第二旋转件安装在中轴上,直线驱动组件驱动中轴和第二旋转件沿着中轴的轴向往复运动;俯仰驱动杆的一端铰接第二旋转件,另一端铰接翼杆;本发明通过调整不同扑旋翼机构中翼板的扑动频率可以使得不同的扑旋翼机构产生不同的升力,进而改变多翼飞行器的姿态,不但有助于提高飞行器的方

多旋翼无人机飞行原理.pdf
多旋翼无人机飞行原理飞行原理从根上说的话就是系统运动力的来源是什么?在基本组成部分介绍了无人机的动力系统:电调-电机-螺旋桨。给人最直观的感受就是电机带动螺旋桨转,产生升力。螺旋桨旋转产生升力的原因,在很多年前伯努利就给出了解释,简单说就是流速大,压强小;流速小,压强大,也就是伯努利定理。可以看到螺旋桨的桨面并不是平的,旋转时桨面上下的空气流速不一直,会产生向上的推力。飞行原理上面我们知道了飞行动力的来源,下面我们来详细介绍下多旋翼无人机的飞行原理。以四轴飞行器为例。四轴飞行器系统采用位于机臂末端的电机带