
机器人行走.ppt

wt****58


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
机器人脚轮、行走机器人及行走机器人的控制方法.pdf
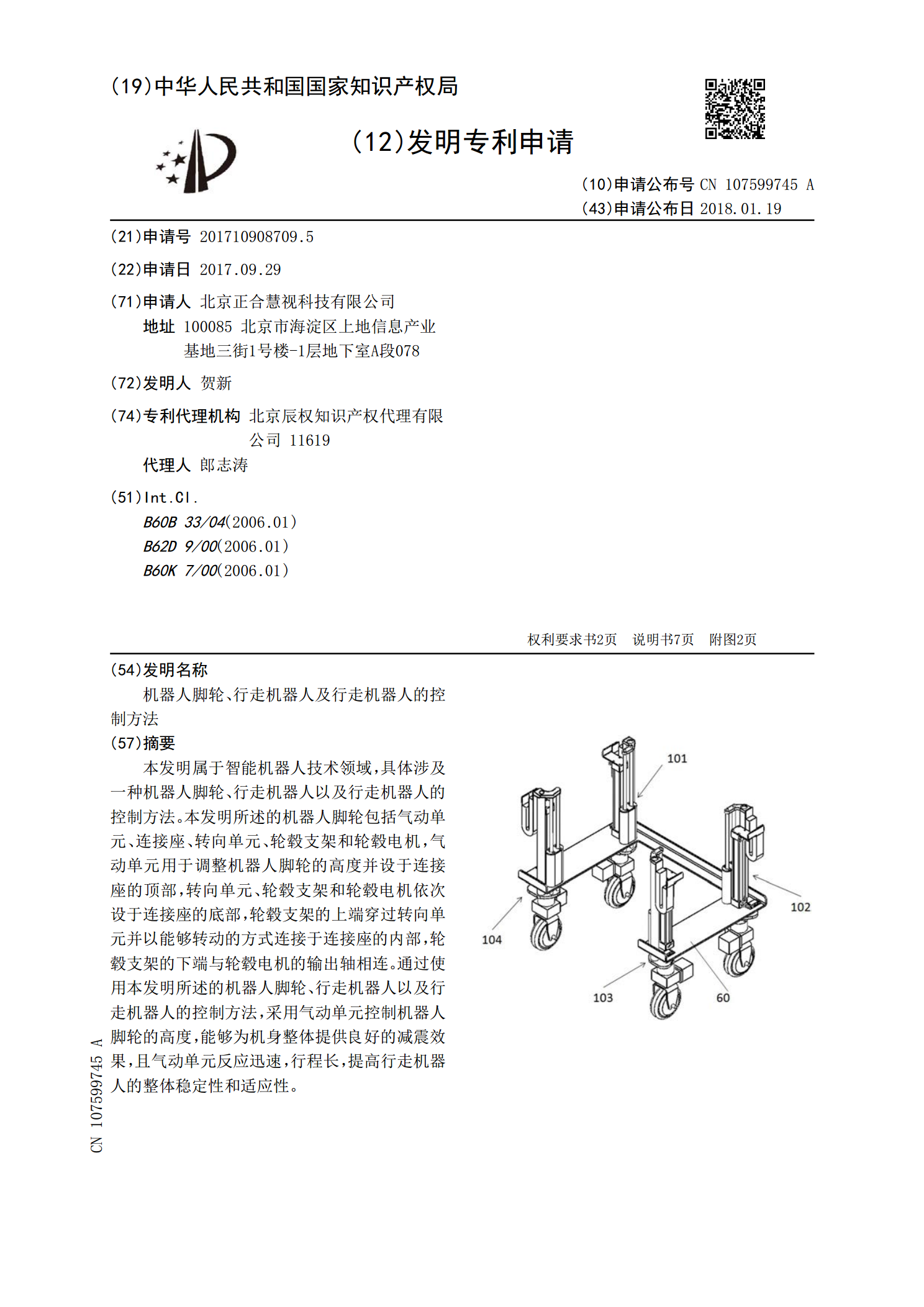
本发明属于智能机器人技术领域,具体涉及一种机器人脚轮、行走机器人以及行走机器人的控制方法。本发明所述的机器人脚轮包括气动单元、连接座、转向单元、轮毂支架和轮毂电机,气动单元用于调整机器人脚轮的高度并设于连接座的顶部,转向单元、轮毂支架和轮毂电机依次设于连接座的底部,轮毂支架的上端穿过转向单元并以能够转动的方式连接于连接座的内部,轮毂支架的下端与轮毂电机的输出轴相连。通过使用本发明所述的机器人脚轮、行走机器人以及行走机器人的控制方法,采用气动单元控制机器人脚轮的高度,能够为机身整体提供良好的减震效果,且气动

行走机器人及其行走方法.pdf
提供了一种行走机器人及其行走方法。该行走机器人包括行走齿轮、第一齿条、第二齿条以及多个夹爪。第一齿条与行走齿轮啮合,沿行走机器人的行走方向延伸。第二齿条与行走齿轮啮合,与第一齿条平行。在行走齿轮转动的过程中第一齿条和第二齿条能够沿着行走方向朝向相反侧运动。夹爪用于夹持或松开目标对象。多个夹爪中的一个夹爪与第一齿条固定,多个夹爪中的另一个夹爪与第二齿条固定。这样,行走机器人能够具有较短的行走时间,并且具有较高的驱动效率和稳定性。

机器人行走.ppt
任务一:学习控制机器人前进、停止、转弯的方法。任务二:学习使用“执行模块库”中的“移动”、“延时”、“停止”模块编写程序。机器人邮递员1机器人前进程序分析:机器人前进程序分析:机器人前进程序分析:尝试将左、右电机前进时的数值调整成不一样的,看看机器人会做出什么样的动作?机器人转弯程序分析:通过本节课学习,你有哪些收获?二、将左、右电机前进时的数值调整成不一样时,机器人的转弯方向不同。左电机>右电机机器人向右转左电机<右电机机器人向左转本节课结束!谢谢!请大家多提宝贵意见!

机器人行走.ppt
鸡西市第九中学“1155”尝试教学鸡西市第九中学“1155”尝试教学鸡西市第九中学“1155”尝试教学鸡西市第九中学“1155”尝试教学鸡西市第九中学“1155”尝试教学

机器人行走.doc
第8课机器人行走1教学目标]1.知识与技能“个初步学会对简单的任务进行分析和画流程图,掌握“移动”“延时”和“停止”模块的功一分学会用“执行器模块库”中的“启动电机”模块编写程序,驱动左右电机,并掌握模块参数的设置方法以及左右电机的驱动方法;”个尝试机器人的搭建及程序设计。2.过程与方法分学会使用“移动”“延时”和“停止”模块来使机器人前进、后退和转向;理解机器人行走的方向、左右电机转速差异与机器人转弯的关系。3.情感态度与价值观培养学生学习机器人知识的思维模式和动手能力;培养学生编写程序的兴趣;在调试过