
温度控制的PID算法 及C程序实现 (2).doc

kp****93


1/6

2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

温度控制的PID算法 及C程序实现 (2).doc
温度控制与PID算法温度控制与PID算法j较为复杂,下面结合实际浅显易懂的阐述一下PID控制理论,将温度控制及PID算法作一个简单的描述。温度控制的框图这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值(SV)。系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV),偏差值经过PID调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零。例如,当某一时刻炉内过PCB板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回

(完整word版)温度控制的PID算法-及C程序实现.doc
温度控制与PID算法温度控制与PID算法j较为复杂,下面结合实际浅显易懂的阐述一下PID控制理论,将温度控制及PID算法作一个简单的描述。温度控制的框图这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值(SV)。系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV),偏差值经过PID调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零。例如,当某一时刻炉内过PCB板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回
温度控制的PID算法的C语言程序.doc
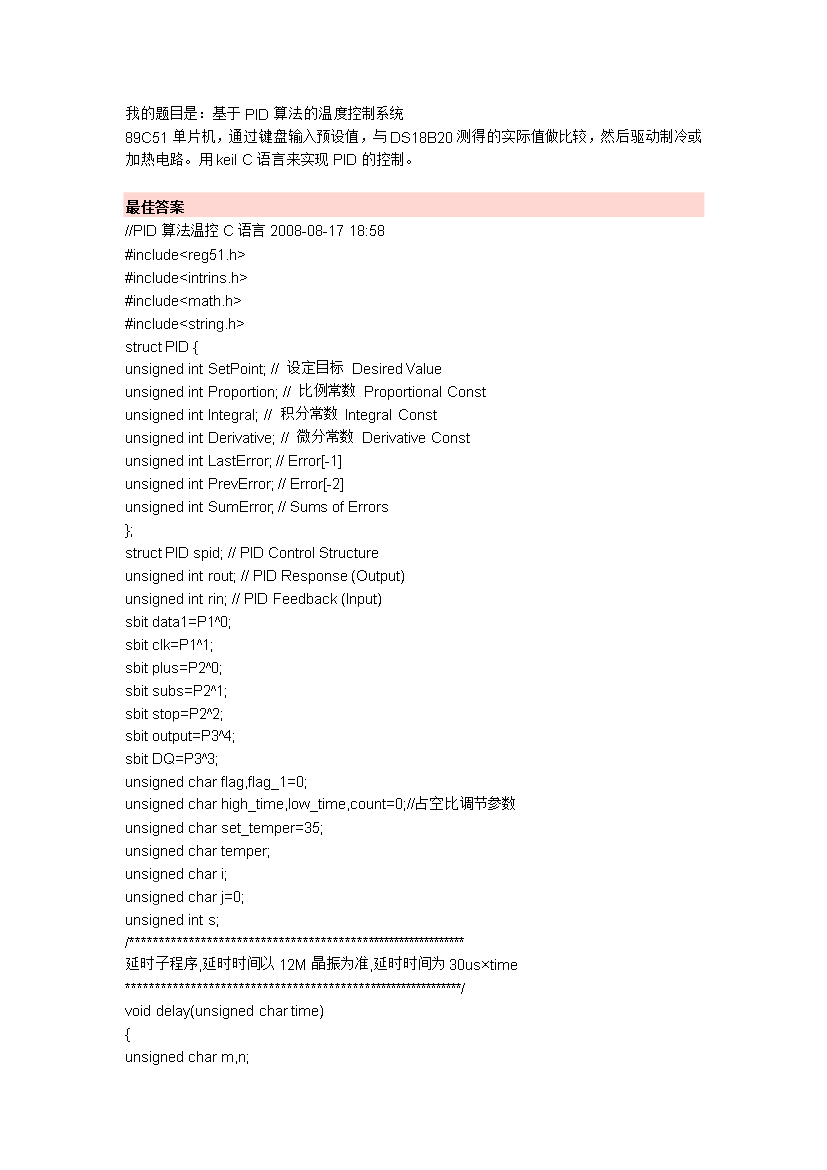
我的题目是:基于PID算法的温度控制系统89C51单片机,通过键盘输入预设值,与DS18B20测得的实际值做比较,然后驱动制冷或加热电路。用keilC语言来实现PID的控制。最佳答案//PID算法温控C语言2008-08-1718:58#include<reg51.h>#include<intrins.h>#include<math.h>#include<string.h>structPID{unsignedintSetPoint;//设定目标DesiredValueunsignedintProporti

(完整word版)温度控制的PID算法-及C程序实现.doc
温度控制与PID算法温度控制与PID算法j较为复杂,下面结合实际浅显易懂的阐述一下PID控制理论,将温度控制及PID算法作一个简单的描述。温度控制的框图这是一个典型的闭环控制系统,用于控制加热温区的温度(PV)保持在恒定的温度设定值(SV)。系统通过温度采集单元反馈回来的实时温度信号(PV)获取偏差值(EV),偏差值经过PID调节器运算输出,控制发热管的发热功率,以克服偏差,促使偏差趋近于零。例如,当某一时刻炉内过PCB板较多,带走的热量较多时,即导致温区温度下降,这时,通过反馈的调节作用,将使温度迅速回

03 温度控制的PID算法的C语言程序.pdf
我的题目是:基于PID算法的温度控制系统89C51单片机,通过键盘输入预设值,与DS18B20测得的实际值做比较,然后驱动制冷或加热电路。用keilC语言来实现PID的控制。最佳答案//PID算法温控C语言2008-08-1718:58#include<reg51.h>#include<intrins.h>#include<math.h>#include<string.h>structPID{unsignedintSetPoint;//设定目标DesiredValueunsignedintProporti