
机器人路径确定方法、装置、电子设备及存储介质.pdf

宁馨****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
机器人路径确定方法、装置、电子设备及存储介质.pdf
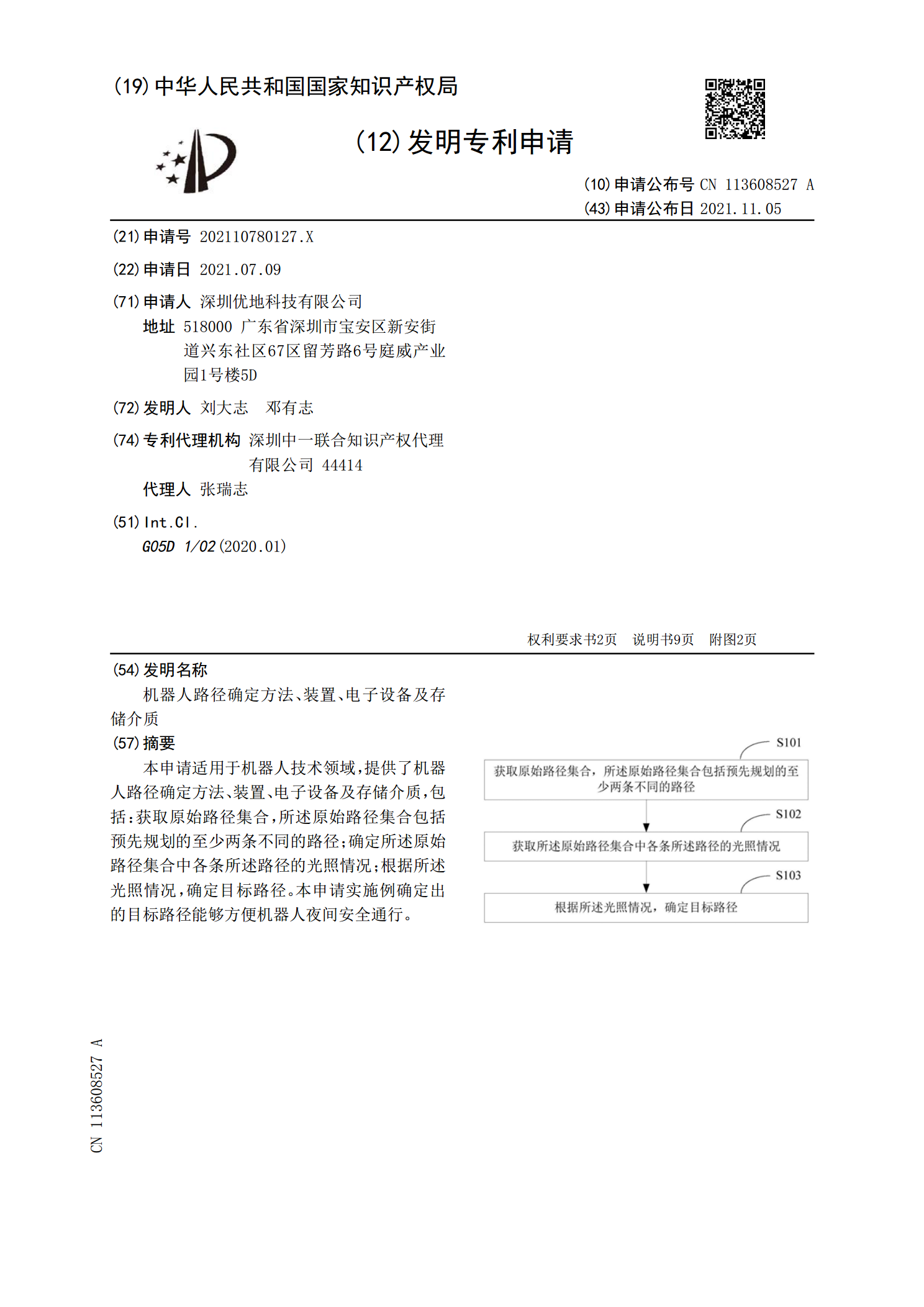
本申请适用于机器人技术领域,提供了机器人路径确定方法、装置、电子设备及存储介质,包括:获取原始路径集合,所述原始路径集合包括预先规划的至少两条不同的路径;确定所述原始路径集合中各条所述路径的光照情况;根据所述光照情况,确定目标路径。本申请实施例确定出的目标路径能够方便机器人夜间安全通行。
路径确定方法、装置、电子设备及存储介质.pdf
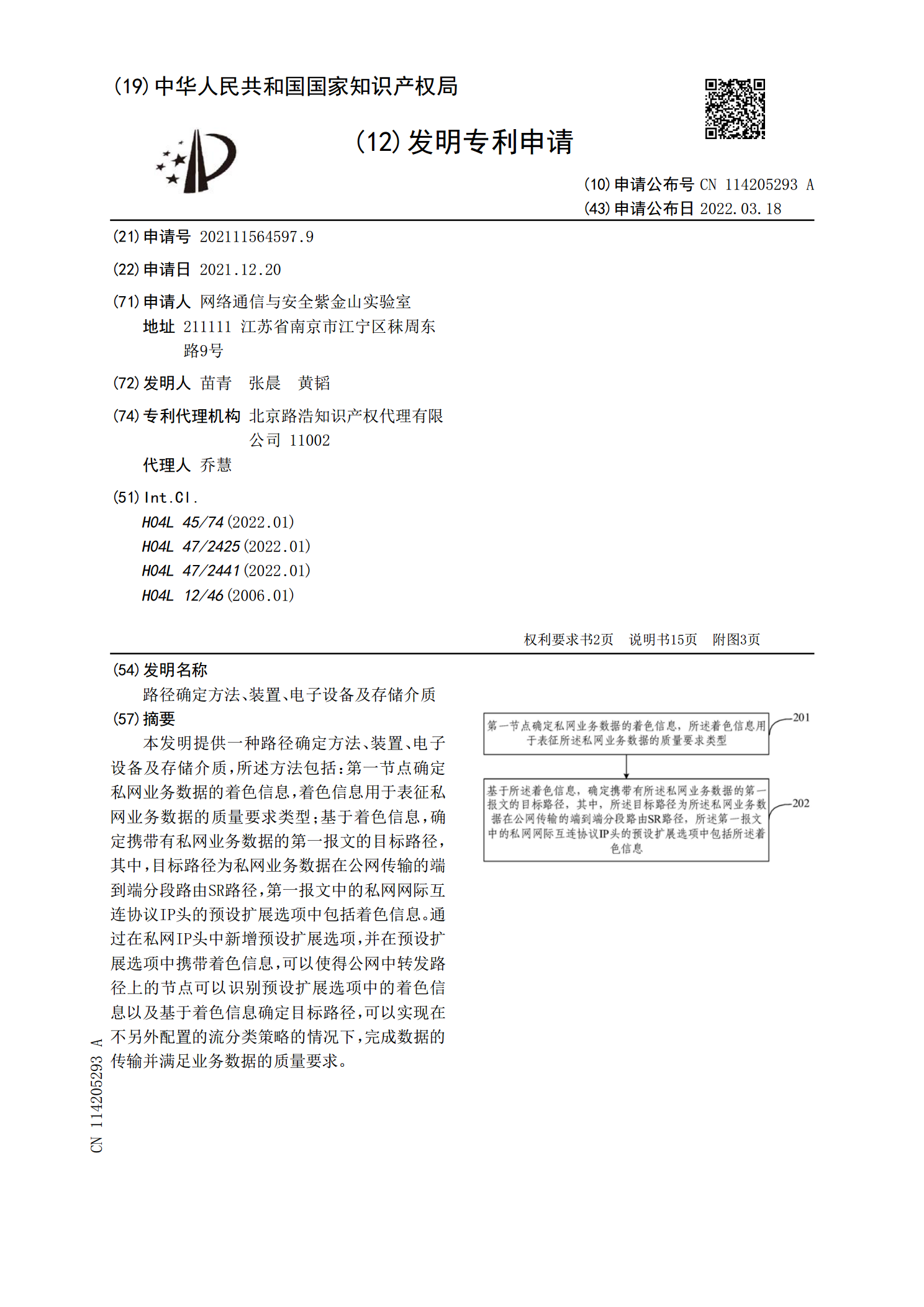
本发明提供一种路径确定方法、装置、电子设备及存储介质,所述方法包括:第一节点确定私网业务数据的着色信息,着色信息用于表征私网业务数据的质量要求类型;基于着色信息,确定携带有私网业务数据的第一报文的目标路径,其中,目标路径为私网业务数据在公网传输的端到端分段路由SR路径,第一报文中的私网网际互连协议IP头的预设扩展选项中包括着色信息。通过在私网IP头中新增预设扩展选项,并在预设扩展选项中携带着色信息,可以使得公网中转发路径上的节点可以识别预设扩展选项中的着色信息以及基于着色信息确定目标路径,可以实现在不另外

路径确定方法、装置、存储介质及电子设备.pdf
本申请实施例公开了一种路径确定方法、装置、存储介质及电子设备。该方法包括:检测第一自导引运输设备位于第一工作点,确定所述第一自导引运输设备从所述第一工作点移动至其他位置必经的主路径路段为停留阻塞路段;检测第二自导引运输设备的运动路径中的主路径路段是否包括所述停留阻塞路段;若是,则禁止所述第二自导引运输设备在所述停留阻塞路段停留。通过执行本技术方案,可以通过变更对自导引运输设备的控制方式,使得自导引运输设备可以避免出现路径死锁的现象,从而实现提高自导引运输设备的工作效率的效果。
确定钻井路径的方法、装置、存储介质及电子设备.pdf
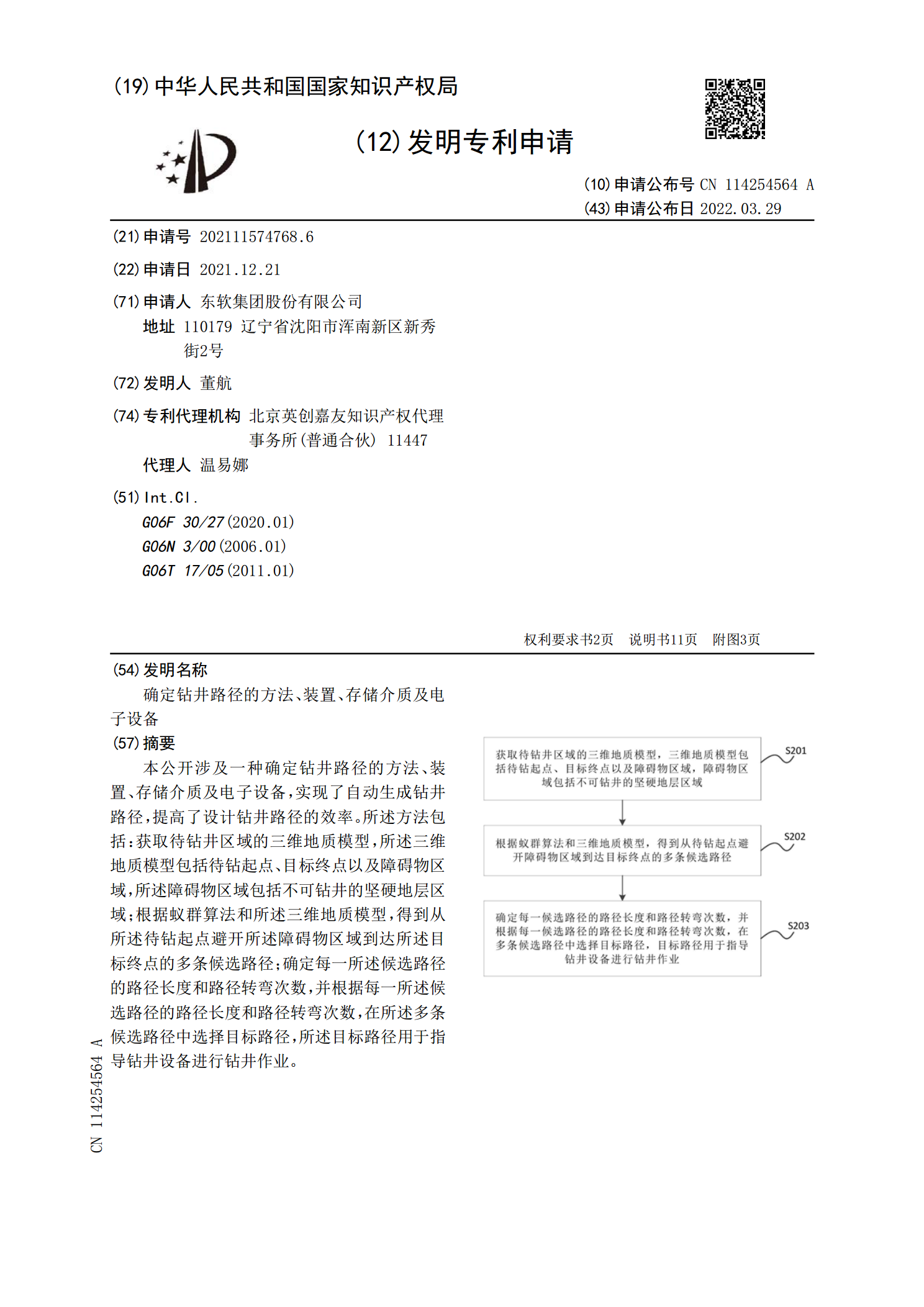
本公开涉及一种确定钻井路径的方法、装置、存储介质及电子设备,实现了自动生成钻井路径,提高了设计钻井路径的效率。所述方法包括:获取待钻井区域的三维地质模型,所述三维地质模型包括待钻起点、目标终点以及障碍物区域,所述障碍物区域包括不可钻井的坚硬地层区域;根据蚁群算法和所述三维地质模型,得到从所述待钻起点避开所述障碍物区域到达所述目标终点的多条候选路径;确定每一所述候选路径的路径长度和路径转弯次数,并根据每一所述候选路径的路径长度和路径转弯次数,在所述多条候选路径中选择目标路径,所述目标路径用于指导钻井设备进行

确定测试路径的方法、装置、电子设备及可读存储介质.pdf
本申请公开了一种确定测试路径的方法、装置、电子设备及可读存储介质,属于通信技术领域。该方法包括:确定待测试的多个目标小区;确定多个目标小区中每个目标小区的经纬度信息;根据每个目标小区的经纬度信息,构建带权图,带权图中的节点用于指示一个目标小区,任意两个节点之间的边的权重用于指示任意两个节点对应的两个目标小区之间的实际直达距离;确定带权图的最短路径作为多个目标小区的测试路径。本申请通过确定合理的测试路径,使得后续按照该测试路径进行外场测试能够缩短时间,避免需要大量的人工成本,从而达到节省成本的目的。