
一种基于信号到达时间差的多站无源定位方法.pdf

论文****轩吖


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于信号到达时间差的多站无源定位方法.pdf
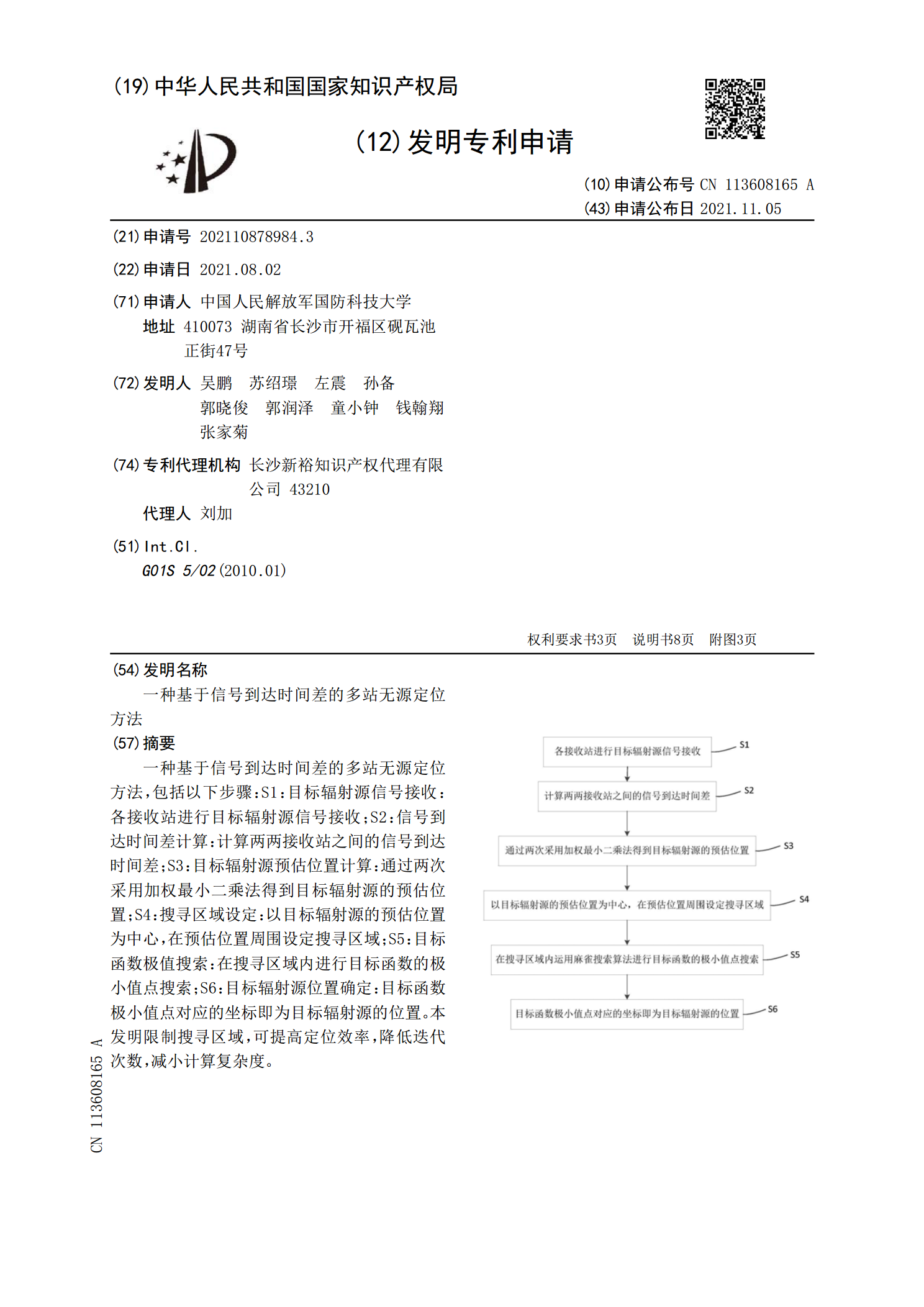
一种基于信号到达时间差的多站无源定位方法,包括以下步骤:S1:目标辐射源信号接收:各接收站进行目标辐射源信号接收;S2:信号到达时间差计算:计算两两接收站之间的信号到达时间差;S3:目标辐射源预估位置计算:通过两次采用加权最小二乘法得到目标辐射源的预估位置;S4:搜寻区域设定:以目标辐射源的预估位置为中心,在预估位置周围设定搜寻区域;S5:目标函数极值搜索:在搜寻区域内进行目标函数的极小值点搜索;S6:目标辐射源位置确定:目标函数极小值点对应的坐标即为目标辐射源的位置。本发明限制搜寻区域,可提高定位效率,

一种基于信号到达时间的定位方法.pdf
本发明公开了一种基于信号到达时间的定位方法,其将非线性的定位问题转换为多重积分问题,在非线性的定位问题转换为多重积分问题的过程中,根据蜂窝移动网络环境中的每个基站的位置、每个基站的信号的测量噪声方差以及待定位终端到每个基站的距离,构造一个高斯分布函数,然后从高斯分布函数中随机抽取若干个样本,再根据抽取到的样本获取待定位终端的位置,优点在于构造的高斯分布函数能提高计算多重积分的效率及积分值的精度,且在求解多重积分问题的过程中只需要抽取少数样本就能得到待定位终端的精确位置,计算复杂度低。

多校准站TDOAFDOA无源定位方法.docx
多校准站TDOAFDOA无源定位方法标题:多校准站TDOA/FDOA无源定位方法摘要:随着通信技术的不断发展,定位技术在无线通信系统中起到了至关重要的作用。无源定位是一种基于接收信号的技术,在无需发送额外信号的情况下实现目标的定位。本文介绍了多校准站TDOA/FDOA无源定位方法,该方法通过利用多个校准站的时间差或频率差来计算目标的位置。详细介绍了TDOA和FDOA的原理及其在多校准站无源定位中的应用。同时,介绍了基于TDOA和FDOA的定位算法,并对实验结果进行了分析和讨论。1.引言无源定位技术是一种基

多校准站TDOAFDOA无源定位方法.docx
多校准站TDOAFDOA无源定位方法无线定位技术是现代无线通信系统中非常重要的技术之一,随着科技的发展,现在有许多无线定位技术来满足各种不同的应用需求。其中,多校准站TDOA/FDOA(TimeDifferenceofArrival/FrequencyDifferenceofArrival)无源定位方法在各个方面尤其是在室内定位中具有广泛的潜力和应用前景。1.理论基础多校准站TDOA/FDOA无源定位方法的实现基于三角定位原理,但其相比传统的定位方法在实现和误差控制方面有较大优势。该方法的主要思想是作为接

基于到达角度和时间差测量的无源跟踪算法研究.docx
基于到达角度和时间差测量的无源跟踪算法研究论文:基于到达角度和时间差测量的无源跟踪算法研究摘要:无线定位技术在越来越多的应用场合中得到了广泛的应用,其中无源定位技术因为无需依靠无线电标签等设备,具有成本低、功耗小等优点,逐渐成为无线定位技术的重要研究方向。本文探讨了基于到达角度和时间差测量的无源跟踪算法,通过建立多个基站和目标节点之间的定位关系来实现目标节点的无线定位,并对该算法的实现步骤、优点、缺点进行了分析和讨论。关键词:无线定位;无源跟踪;到达角度;时间差测量;基站第一部分引言随着科技的逐步发展,无