
基于到达角度和时间差测量的无源跟踪算法研究.docx

快乐****蜜蜂


1/4

2/4

3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于到达角度和时间差测量的无源跟踪算法研究.docx
基于到达角度和时间差测量的无源跟踪算法研究论文:基于到达角度和时间差测量的无源跟踪算法研究摘要:无线定位技术在越来越多的应用场合中得到了广泛的应用,其中无源定位技术因为无需依靠无线电标签等设备,具有成本低、功耗小等优点,逐渐成为无线定位技术的重要研究方向。本文探讨了基于到达角度和时间差测量的无源跟踪算法,通过建立多个基站和目标节点之间的定位关系来实现目标节点的无线定位,并对该算法的实现步骤、优点、缺点进行了分析和讨论。关键词:无线定位;无源跟踪;到达角度;时间差测量;基站第一部分引言随着科技的逐步发展,无

基于到达时间差直方图的信号分选算法研究.docx
基于到达时间差直方图的信号分选算法研究论文题目:基于到达时间差直方图的信号分选算法研究摘要:在无线通信的过程中,信号分选是一项重要的任务,其目的是从复杂的信道中提取出目标信号。本文提出了一种基于到达时间差直方图的信号分选算法。该算法将接收信号分离成多个子信号,并提取每个子信号的到达时间差直方图。通过比较不同子信号之间的判别能力,可知道哪些子信号含有目标信号,从而提高信号识别的准确性。关键词:信号分选;到达时间差直方图;判别能力一、引言信号分选是无线通信中的一个重要问题,其目的是从包含多个信号的复杂信道中提

基于角度变化率的单站无源定位跟踪算法研究.docx
基于角度变化率的单站无源定位跟踪算法研究随着科技的发展和无线电通信技术的普及,无线通信在我们的日常生活中变得越来越重要。无线通信技术除了传输和接收信息之外,还可以用于定位和跟踪物体的位置。在无源定位的技术中,利用接收器在不同时间收到的信号的差异来确定目标的位置,而无需目标发射信号。这种技术不仅需要高精度的设备和算法,还需要在无需目标合作的情况下进行跟踪和定位。本文旨在研究一种基于角度变化率的单站无源定位跟踪算法,该算法可以用于确定目标的位置和轨迹。算法是基于无线天线接收器接收到的信号相位变化率来跟踪目标。

基于到达时间和多普勒频率的海战场无源跟踪模型.docx
基于到达时间和多普勒频率的海战场无源跟踪模型基于到达时间和多普勒频率的海战场无源跟踪模型摘要:随着科技的迅猛发展,无源跟踪技术在海战场上发挥着重要的作用。本文提出了一种基于到达时间和多普勒频率的海战场无源跟踪模型。首先介绍了无源跟踪的概念和背景,然后详细论述了到达时间和多普勒频率在无源跟踪中的应用。接着,本文提出了一种基于到达时间和多普勒频率的跟踪模型,包括信号捕获、信号处理和跟踪定位等步骤。最后,通过实验验证了该模型的可行性和有效性。关键词:无源跟踪、到达时间、多普勒频率、海战场引言:随着现代战争的发展
一种基于信号到达时间差的多站无源定位方法.pdf
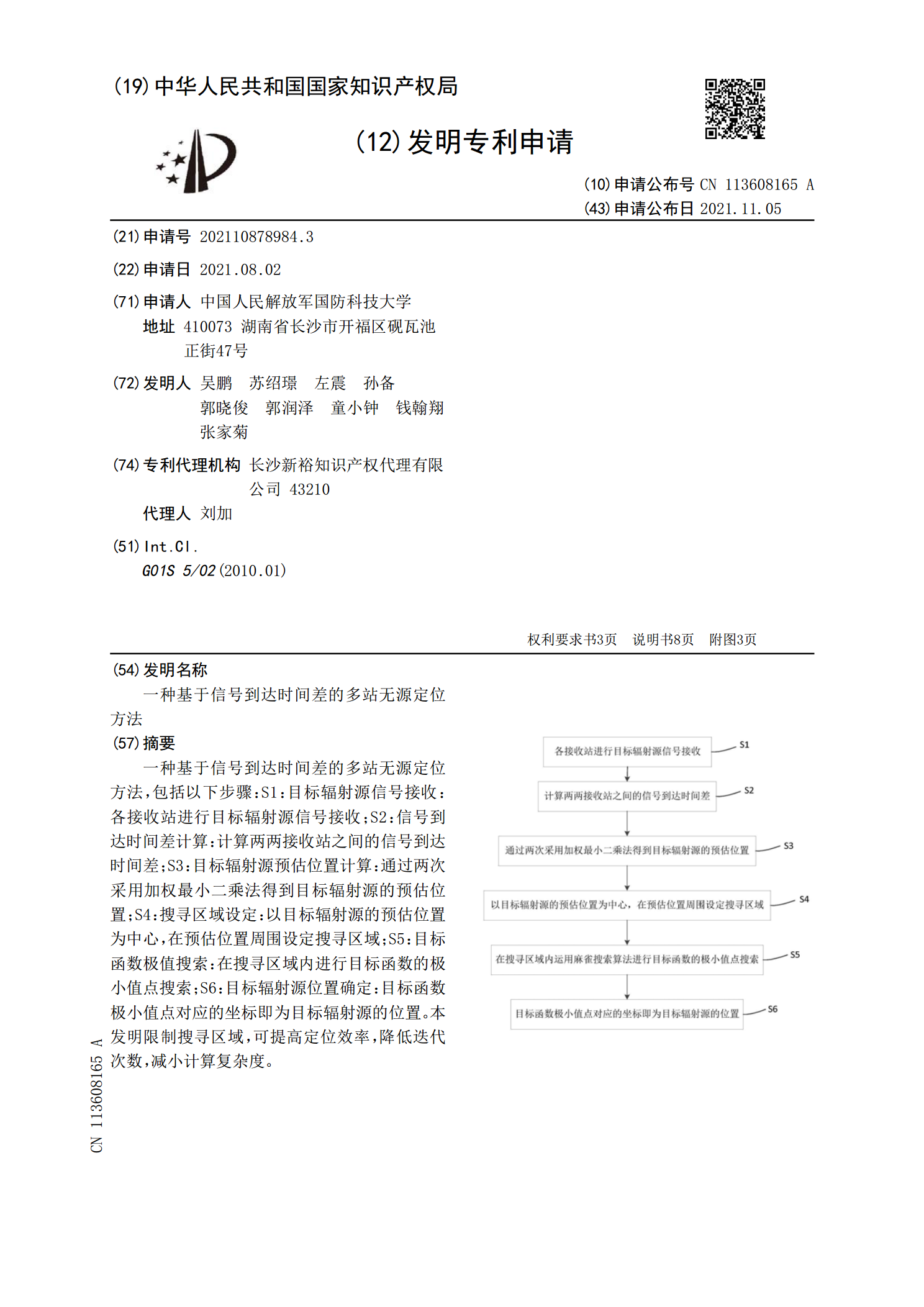
一种基于信号到达时间差的多站无源定位方法,包括以下步骤:S1:目标辐射源信号接收:各接收站进行目标辐射源信号接收;S2:信号到达时间差计算:计算两两接收站之间的信号到达时间差;S3:目标辐射源预估位置计算:通过两次采用加权最小二乘法得到目标辐射源的预估位置;S4:搜寻区域设定:以目标辐射源的预估位置为中心,在预估位置周围设定搜寻区域;S5:目标函数极值搜索:在搜寻区域内进行目标函数的极小值点搜索;S6:目标辐射源位置确定:目标函数极小值点对应的坐标即为目标辐射源的位置。本发明限制搜寻区域,可提高定位效率,