
一种基于信号到达时间的定位方法.pdf

一条****然后


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于信号到达时间的定位方法.pdf
本发明公开了一种基于信号到达时间的定位方法,其将非线性的定位问题转换为多重积分问题,在非线性的定位问题转换为多重积分问题的过程中,根据蜂窝移动网络环境中的每个基站的位置、每个基站的信号的测量噪声方差以及待定位终端到每个基站的距离,构造一个高斯分布函数,然后从高斯分布函数中随机抽取若干个样本,再根据抽取到的样本获取待定位终端的位置,优点在于构造的高斯分布函数能提高计算多重积分的效率及积分值的精度,且在求解多重积分问题的过程中只需要抽取少数样本就能得到待定位终端的精确位置,计算复杂度低。
一种基于信号到达时间差的多站无源定位方法.pdf
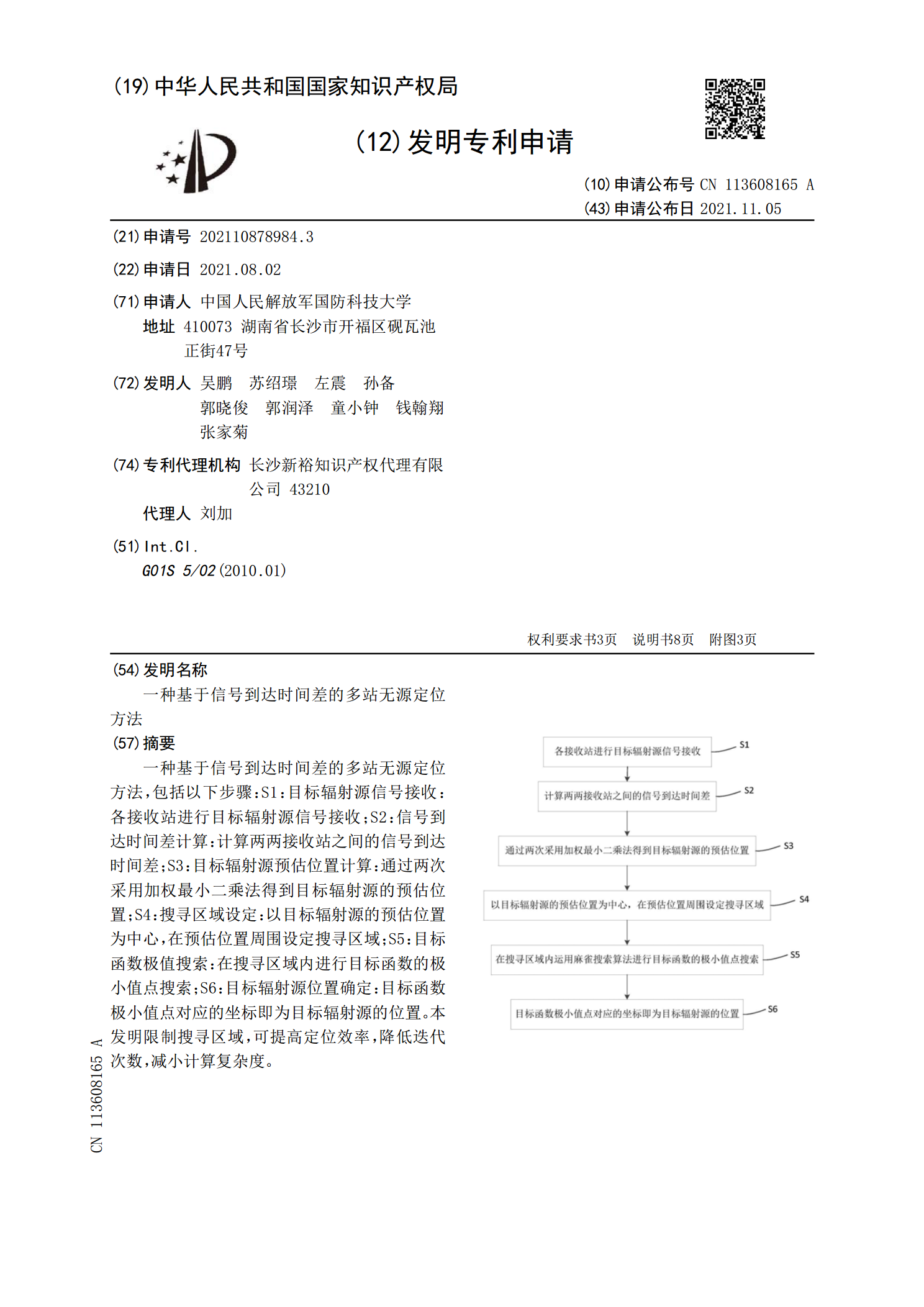
一种基于信号到达时间差的多站无源定位方法,包括以下步骤:S1:目标辐射源信号接收:各接收站进行目标辐射源信号接收;S2:信号到达时间差计算:计算两两接收站之间的信号到达时间差;S3:目标辐射源预估位置计算:通过两次采用加权最小二乘法得到目标辐射源的预估位置;S4:搜寻区域设定:以目标辐射源的预估位置为中心,在预估位置周围设定搜寻区域;S5:目标函数极值搜索:在搜寻区域内进行目标函数的极小值点搜索;S6:目标辐射源位置确定:目标函数极小值点对应的坐标即为目标辐射源的位置。本发明限制搜寻区域,可提高定位效率,

多基站下基于信号到达时间的室内三维定位.docx
多基站下基于信号到达时间的室内三维定位标题:基于信号到达时间的多基站室内三维定位技术摘要:室内定位技术在日常生活和商业应用中扮演着重要的角色。本论文旨在介绍一种基于信号到达时间(TimeofArrival,TOA)的室内三维定位方法,通过多个基站的信号到达时间差异来实现定位准确性的提升。通过该方法,我们可以利用三角定位原理进行室内物体或人的精确定位,对于室内导航、物体追踪及安全监控等应用有着广泛的潜在用途。1.引言室内定位技术的应用不断增加,但面临着如多径效应、信号衰减和多路径干扰等挑战。基于信号到达时间

基于到达角和到达时间联合估计的单基站定位方法及系统.pdf
本发明提供了一种基于到达角和到达时间联合估计的单基站定位方法及系统,该定位方法包括:步骤S1,对接收的信号,采用3D‑MUSIC算法进行粗估计,得到粗估计的方位角、仰视角以及时延;步骤S2,对步骤S1得到的粗估计的结果进一步细化,利用细估计的三维角度与时延计算公式估算出方位角偏移量、仰视角偏移量与时延偏移量,进一步得到更新的方位角、更新的仰视角以及更新的时延;重复该步骤,进行反复迭代,直至完全收敛;步骤S3,输出迭代完成后得到的方位角、仰视角以及时延。本发明的技术方案的精度明显优于目前子空间类其他类型的算

一种基于声信号时延估计及到达频率的室内非视距定位方法.pdf
本发明公开了位置的服务技术领域的一种基于声信号时延估计及到达频率的室内非视距定位方法,基于距离量测以及频率到达信息中所包含的目标相对运动速度量测来对目标的位置进行求解,目标设备对信标节点发出的声音信号采集,得到原始声音信号,对来自各信标节点的声信号进行探测及分割,依靠距离量测计算目标在定位时的初始位置估计,结合声信号的时延估计及到达频率估计对目标当前位置进行估计,进而在不依赖于其它传感器的前提下,仅通过定位声信号所包含的时延信息及多普勒信息即可增加目标定位所需的信息量,使得对目标设备进行精确定位所需的视距