
一种基于UNet的雷达多目标距离和速度估计方法.pdf

骊英****bb

1/8
2/8
3/8

4/8
5/8

6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于UNet的雷达多目标距离和速度估计方法.pdf
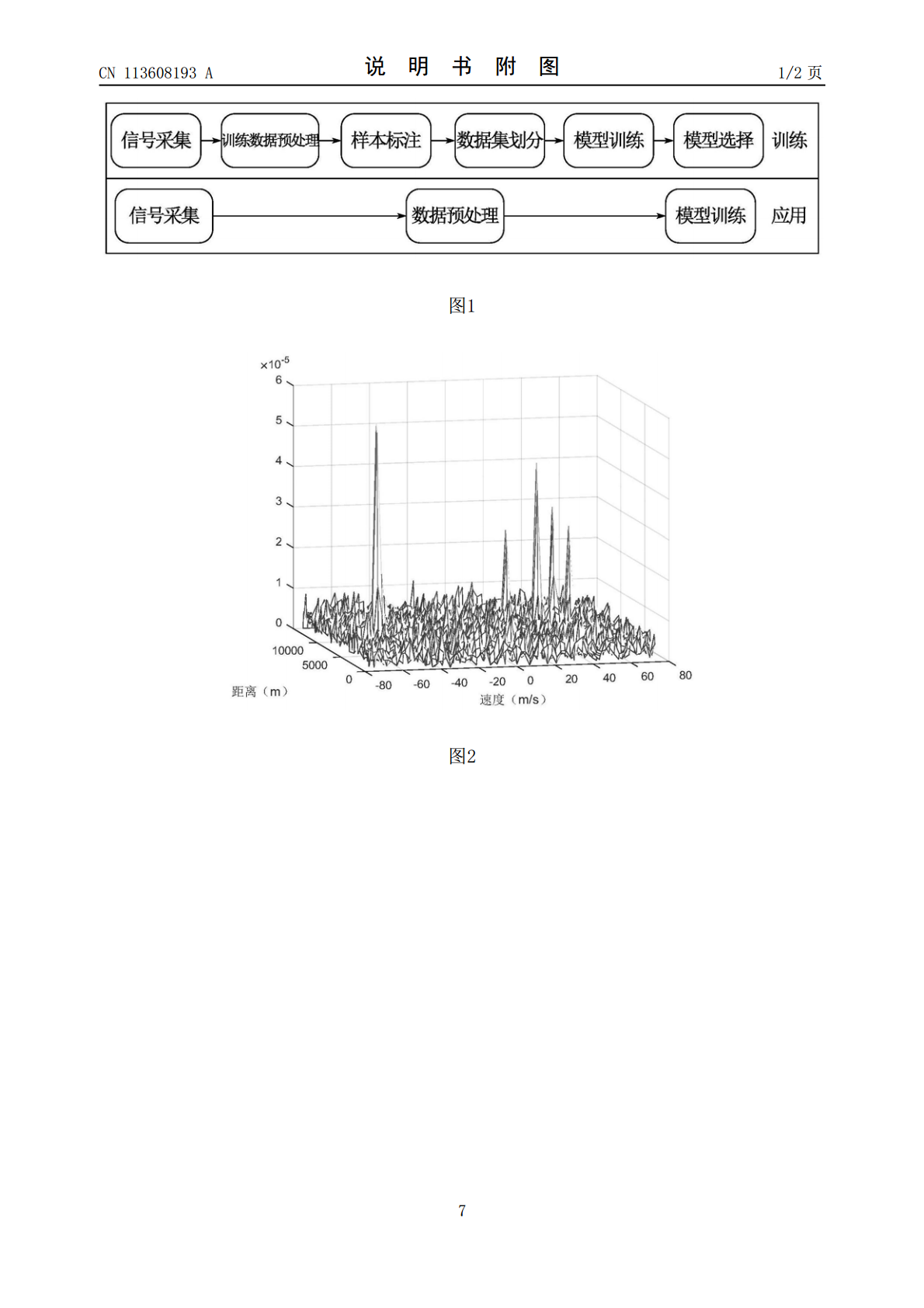
本发明涉及一种基于UNet的雷达多目标距离和速度估计方法,主要用于对雷达回波信号做匹配滤波和多普勒处理得到距离‑多普勒像,并将雷达回波信号的距离‑多普勒像作为UNet的输入来训练语义分割深度网络,将新采集的雷达回波信号的距离‑多普勒像输入到训练好的UNet中,从而可获取其识别结果,即UNet识别为目标的点即为探测的目标,计算目标点对应的距离和速度坐标即可得到目标的距离和速度。本方法能够适用于低信噪比情形,能自动一次性检测出回波信号中的所有目标并估计出其对应的距离和速度,具有很好的准确性、快速性和鲁棒性。

基于TSFCW雷达的多目标速度和距离估计算法.docx
基于TSFCW雷达的多目标速度和距离估计算法基于TSFCW雷达的多目标速度和距离估计算法摘要:多目标速度和距离估计是雷达目标跟踪和探测中的关键问题,本文提出了一种基于TSFCW雷达的多目标速度和距离估计算法。该算法通过分析雷达接收到的信号,利用时间-速度-距离互相关函数(TSFCW)算法,对目标的速度和距离进行估计。实验结果表明,该算法能够有效地实现多目标的速度和距离估计,具有较高的准确性和稳定性。关键词:TSFCW雷达、多目标、速度和距离估计、互相关函数、准确性引言雷达是一种常用的目标跟踪和探测工具,其

一种LFMCW雷达多目标距离-速度配对新方法.docx
一种LFMCW雷达多目标距离-速度配对新方法摘要雷达技术在物联网中占有重要地位,尤其在多目标检测方面至关重要。本文提出了一种基于LFMCW雷达的多目标距离-速度配对新方法。该方法通过对数据进行时域和频域分析,结合最大似然估计和卡尔曼滤波算法,可有效地降低多目标检测中的误检率和漏检率。实验结果表明,该方法在多目标检测中的性能有所改善。关键词:LFMCW雷达;多目标检测;距离-速度配对;最大似然估计;卡尔曼滤波引言在物联网领域,雷达技术已经成为不可或缺的部分。多目标检测是一项关键任务,往往涉及大量复杂的数据处
一种基于图信号处理的雷达目标距离估计方法.pdf
本发明公开了一种基于图信号处理的雷达目标距离估计方法,该方法对所有阵元进行图信号构建,使两两阵元之间的相位信息能够在图傅里叶变换中起更好的特征分解的作用从而获得更好的目标距离估计结果,并使用多个单频信号完成频率分集宽带信号的合成,完成了多目标距离估计,降低了系统复杂度。采用全连接的邻接矩阵As图信号的方式进行目标距离估计,时间和空间复杂度与稀疏连接图信号目标距离估计方法一样,得到的结果归一化结果更好,引入图信号处理的方法用于目标距离估计中,得到新的目标距离估计方法,通过加入阵元排列下阵元之间的位置差关系对

连续波雷达加速度和速度估计方法研究.docx
连续波雷达加速度和速度估计方法研究标题:连续波雷达加速度和速度估计方法研究摘要:连续波雷达广泛应用于车辆、船舶或飞机等移动目标的跟踪与测量。其中,加速度和速度估计作为连续波雷达性能的重要指标,对于目标跟踪和运动状态探测具有重要意义。本文主要研究了连续波雷达加速度和速度估计的相关方法,包括基于多普勒频移的方法、基于相位差测量的方法以及基于多目标跟踪的方法。通过对这些方法的分析和比较,为进一步提高连续波雷达的加速度和速度估计性能提供了参考。1.引言连续波雷达作为一种主要的雷达测量技术,具有快速测量、较高精度和