
基于TSFCW雷达的多目标速度和距离估计算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于TSFCW雷达的多目标速度和距离估计算法.docx
基于TSFCW雷达的多目标速度和距离估计算法基于TSFCW雷达的多目标速度和距离估计算法摘要:多目标速度和距离估计是雷达目标跟踪和探测中的关键问题,本文提出了一种基于TSFCW雷达的多目标速度和距离估计算法。该算法通过分析雷达接收到的信号,利用时间-速度-距离互相关函数(TSFCW)算法,对目标的速度和距离进行估计。实验结果表明,该算法能够有效地实现多目标的速度和距离估计,具有较高的准确性和稳定性。关键词:TSFCW雷达、多目标、速度和距离估计、互相关函数、准确性引言雷达是一种常用的目标跟踪和探测工具,其
一种基于UNet的雷达多目标距离和速度估计方法.pdf
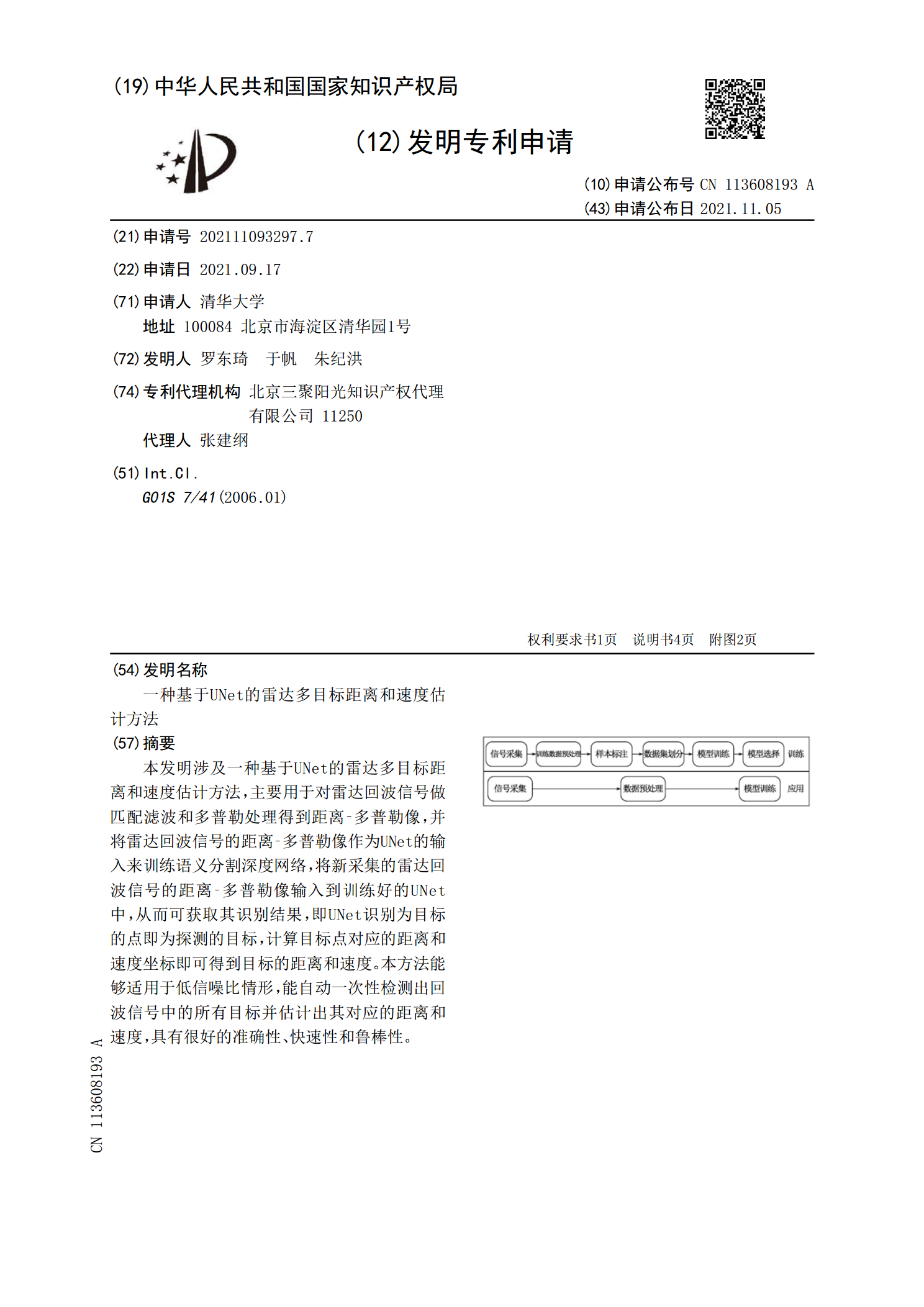
本发明涉及一种基于UNet的雷达多目标距离和速度估计方法,主要用于对雷达回波信号做匹配滤波和多普勒处理得到距离‑多普勒像,并将雷达回波信号的距离‑多普勒像作为UNet的输入来训练语义分割深度网络,将新采集的雷达回波信号的距离‑多普勒像输入到训练好的UNet中,从而可获取其识别结果,即UNet识别为目标的点即为探测的目标,计算目标点对应的距离和速度坐标即可得到目标的距离和速度。本方法能够适用于低信噪比情形,能自动一次性检测出回波信号中的所有目标并估计出其对应的距离和速度,具有很好的准确性、快速性和鲁棒性。

基于快速迭代插值的FMCW雷达距离估计算法.docx
基于快速迭代插值的FMCW雷达距离估计算法基于快速迭代插值的FMCW雷达距离估计算法摘要:FMCW(FrequencyModulatedContinuousWave)雷达是一种用于距离测量的主要传感器,广泛应用于无人机、自动驾驶、智能交通等领域。本文提出了一种基于快速迭代插值的FMCW雷达距离估计算法。该算法结合了距离测量中存在的多径效应和噪声干扰问题,通过多次迭代和差值处理来提高距离估计的准确性和抗干扰能力。实验结果表明,该算法在复杂环境下具有较好的距离估计性能。关键词:FMCW雷达,距离估计,快速迭代

基于时间反转的MIMO雷达多目标DOA估计.docx
基于时间反转的MIMO雷达多目标DOA估计标题:基于时间反转的MIMO雷达多目标DOA估计摘要:多输入多输出(MIMO)雷达系统可以实现对多个目标的多维信息获取,因此在目标方位角(DOA)估计中具有广泛的应用。然而,现有的MIMO雷达DOA估计方法常常受制于传统信号处理技术的限制,存在分辨率较低、抗噪性能较差、计算复杂度高等问题。为了解决这些问题,本文提出了一种基于时间反转的MIMO雷达多目标DOA估计方法。该方法以时间反转信号作为激励信号,通过对接收信号的相关处理和实时多通道处理,实现了对目标DOA的准

基于最小距离和聚合策略的分解多目标进化算法.docx
基于最小距离和聚合策略的分解多目标进化算法基于最小距离和聚合策略的分解多目标进化算法摘要:多目标优化问题在现实生活中得到了广泛应用,然而解决这类问题仍然具有挑战性。本文提出了基于最小距离和聚合策略的分解多目标进化算法,旨在有效解决多目标优化问题。首先介绍了多目标优化问题的背景和现有的解决方法。然后详细介绍了算法的工作原理和实现细节。针对多目标优化问题,我们将其分解为一系列单目标优化问题,并采用最小距离策略来保持种群的多样性。同时,我们引入聚合策略来维持算法的收敛性。实验结果表明,我们的算法在处理多目标优化