
多无人机协同控制方法和装置.pdf

白凡****12

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多无人机协同控制方法和装置.pdf
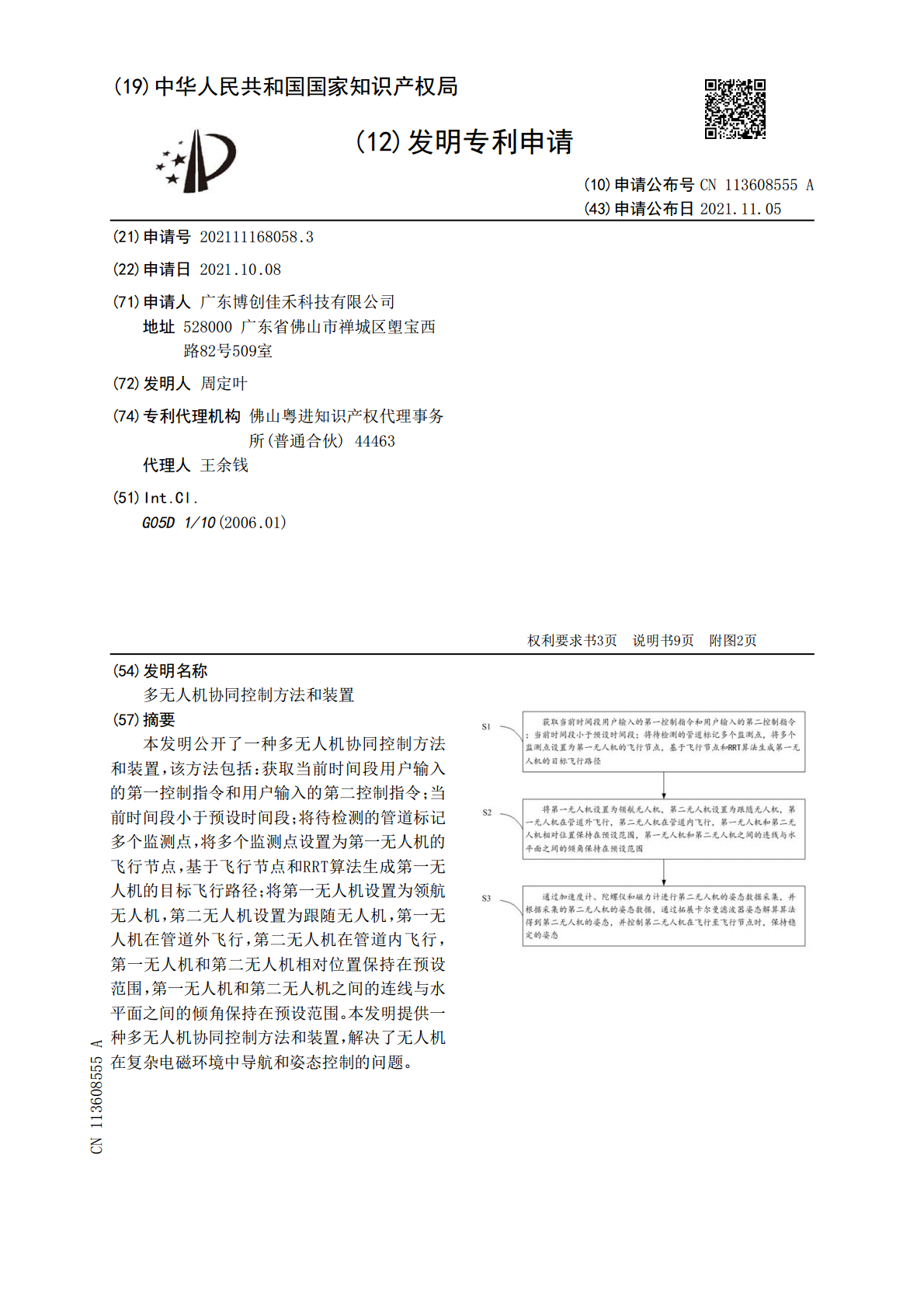
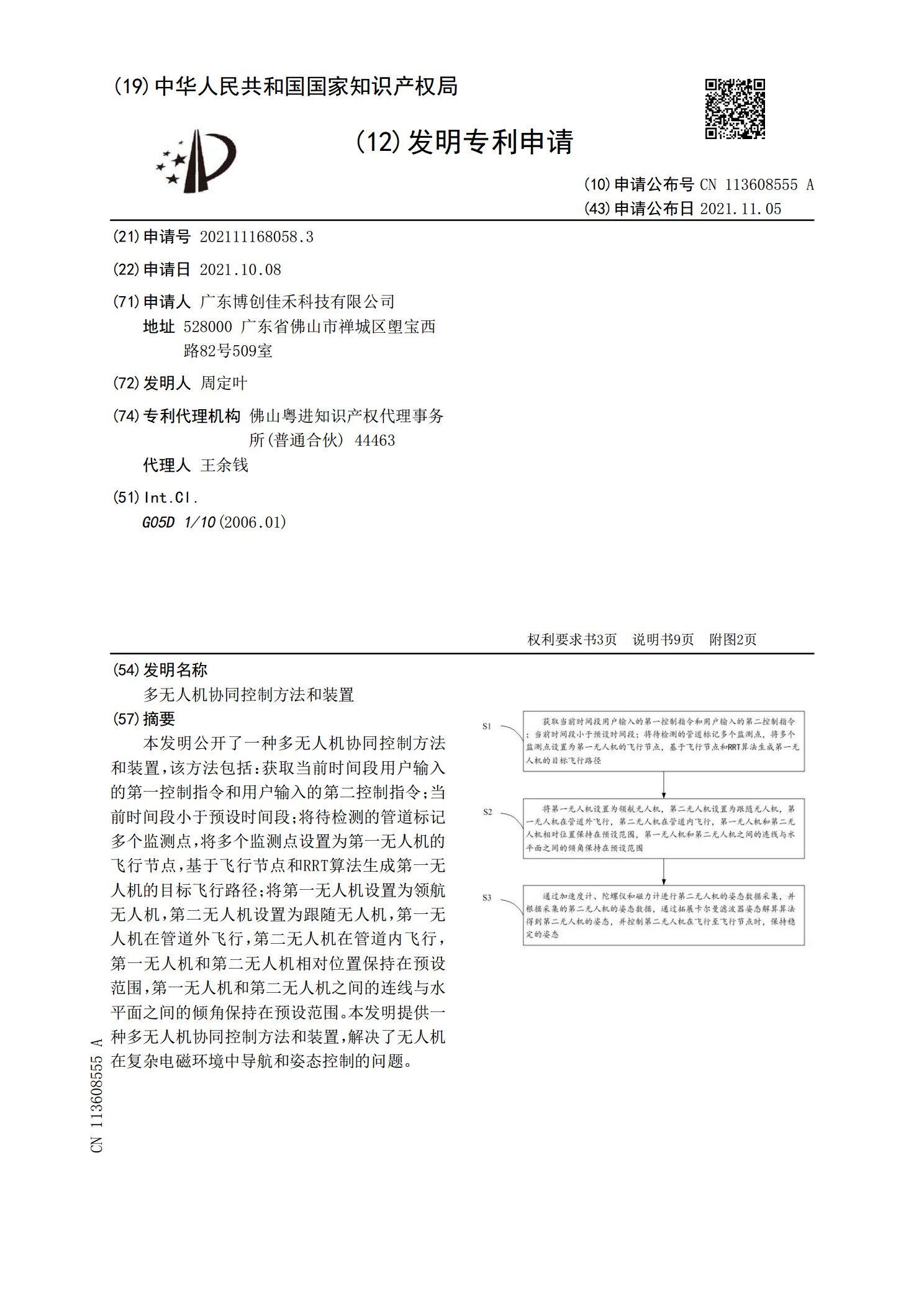
本发明公开了一种多无人机协同控制方法和装置,该方法包括:获取当前时间段用户输入的第一控制指令和用户输入的第二控制指令;当前时间段小于预设时间段;将待检测的管道标记多个监测点,将多个监测点设置为第一无人机的飞行节点,基于飞行节点和RRT算法生成第一无人机的目标飞行路径;将第一无人机设置为领航无人机,第二无人机设置为跟随无人机,第一无人机在管道外飞行,第二无人机在管道内飞行,第一无人机和第二无人机相对位置保持在预设范围,第一无人机和第二无人机之间的连线与水平面之间的倾角保持在预设范围。本发明提供一种多无人机协
多无人机与车辆协同巡检的路径优化方法和装置.pdf
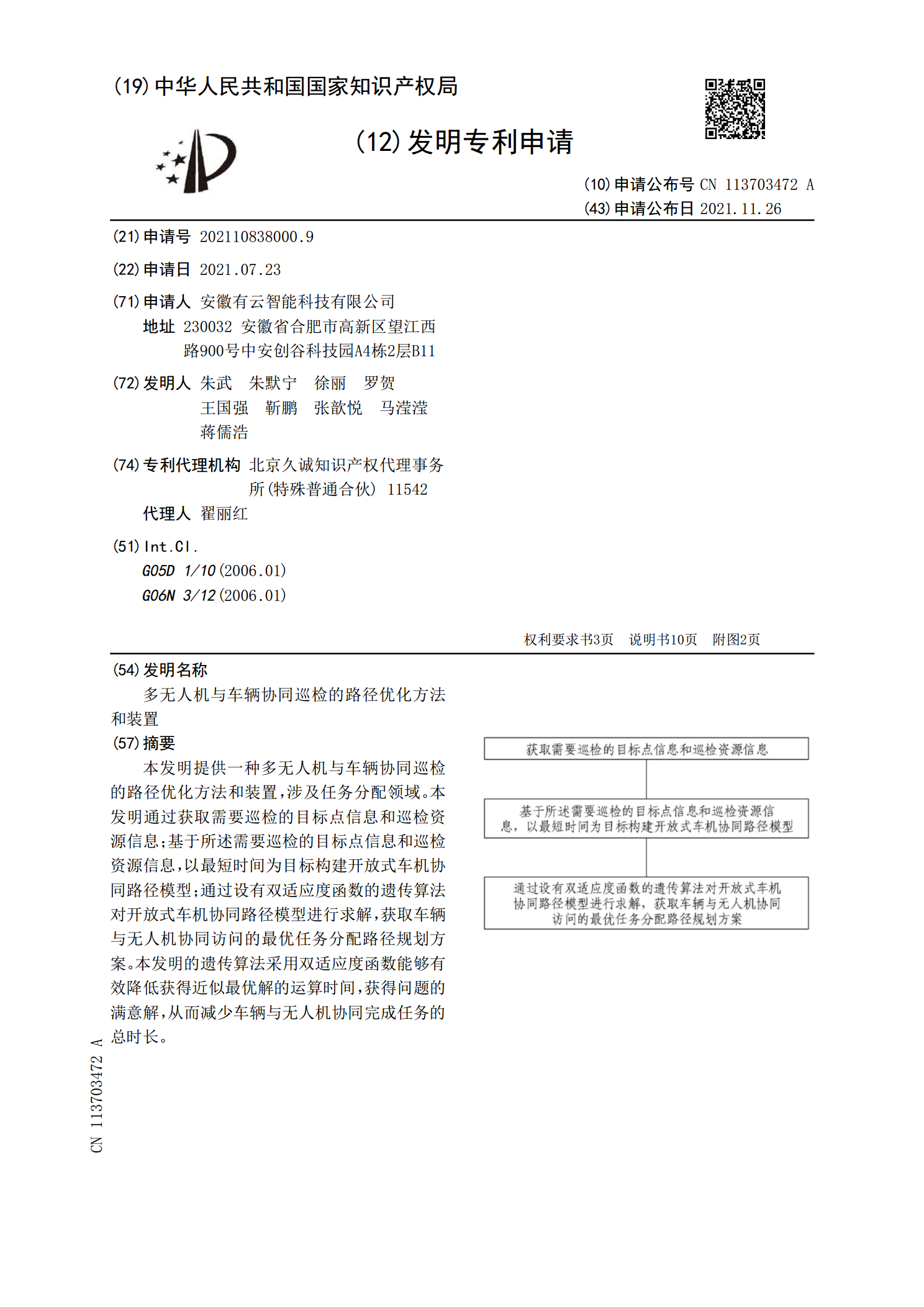
本发明提供一种多无人机与车辆协同巡检的路径优化方法和装置,涉及任务分配领域。本发明通过获取需要巡检的目标点信息和巡检资源信息;基于所述需要巡检的目标点信息和巡检资源信息,以最短时间为目标构建开放式车机协同路径模型;通过设有双适应度函数的遗传算法对开放式车机协同路径模型进行求解,获取车辆与无人机协同访问的最优任务分配路径规划方案。本发明的遗传算法采用双适应度函数能够有效降低获得近似最优解的运算时间,获得问题的满意解,从而减少车辆与无人机协同完成任务的总时长。

多无人机时序到达协同控制方法.docx
多无人机时序到达协同控制方法摘要随着多无人机系统越来越普及,无人机之间的协同控制成为研究的热点之一。本文针对多无人机时序到达协同控制问题进行了深入研究。提出了一种基于时序到达的无人机协同控制方法。该方法能够使得多个无人机之间协同工作,完成任务并保持安全。本文首先介绍了多无人机系统的基础知识和相关研究现状,强调了时序到达协同控制的重要性。接着,提出了时序到达协同控制的目标和原理。在此基础上,给出了一种基于时序到达的无人机协同控制方法。该方法采用了分布式控制理论,以及无人机之间的协同通信技术。最后,通过实验验
一种基于图论的多无人机协同控制方法.pdf
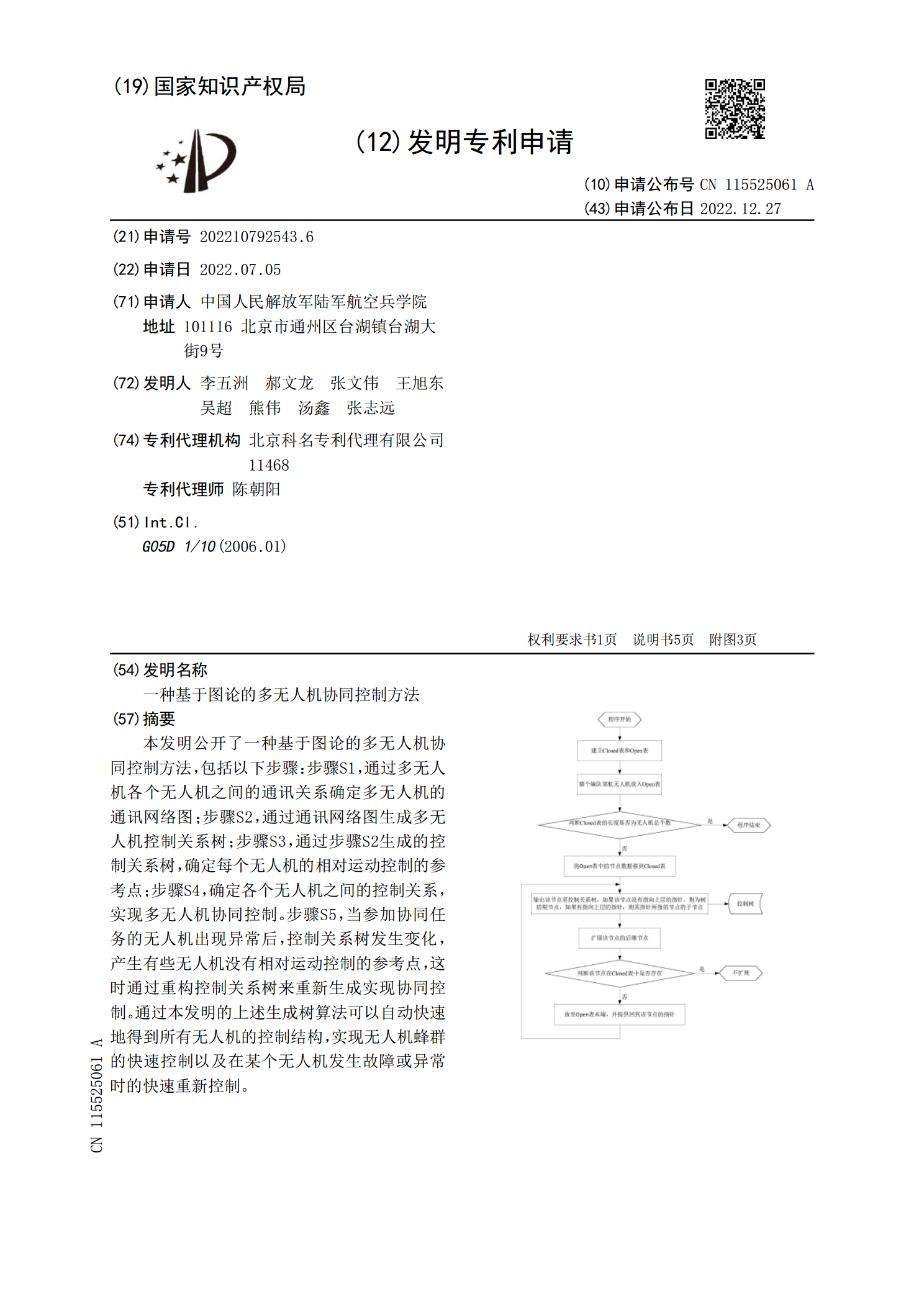
本发明公开了一种基于图论的多无人机协同控制方法,包括以下步骤:步骤S1,通过多无人机各个无人机之间的通讯关系确定多无人机的通讯网络图;步骤S2,通过通讯网络图生成多无人机控制关系树;步骤S3,通过步骤S2生成的控制关系树,确定每个无人机的相对运动控制的参考点;步骤S4,确定各个无人机之间的控制关系,实现多无人机协同控制。步骤S5,当参加协同任务的无人机出现异常后,控制关系树发生变化,产生有些无人机没有相对运动控制的参考点,这时通过重构控制关系树来重新生成实现协同控制。通过本发明的上述生成树算法可以自动快速
基于网络算法的多无人机协同吊运的控制方法.pdf
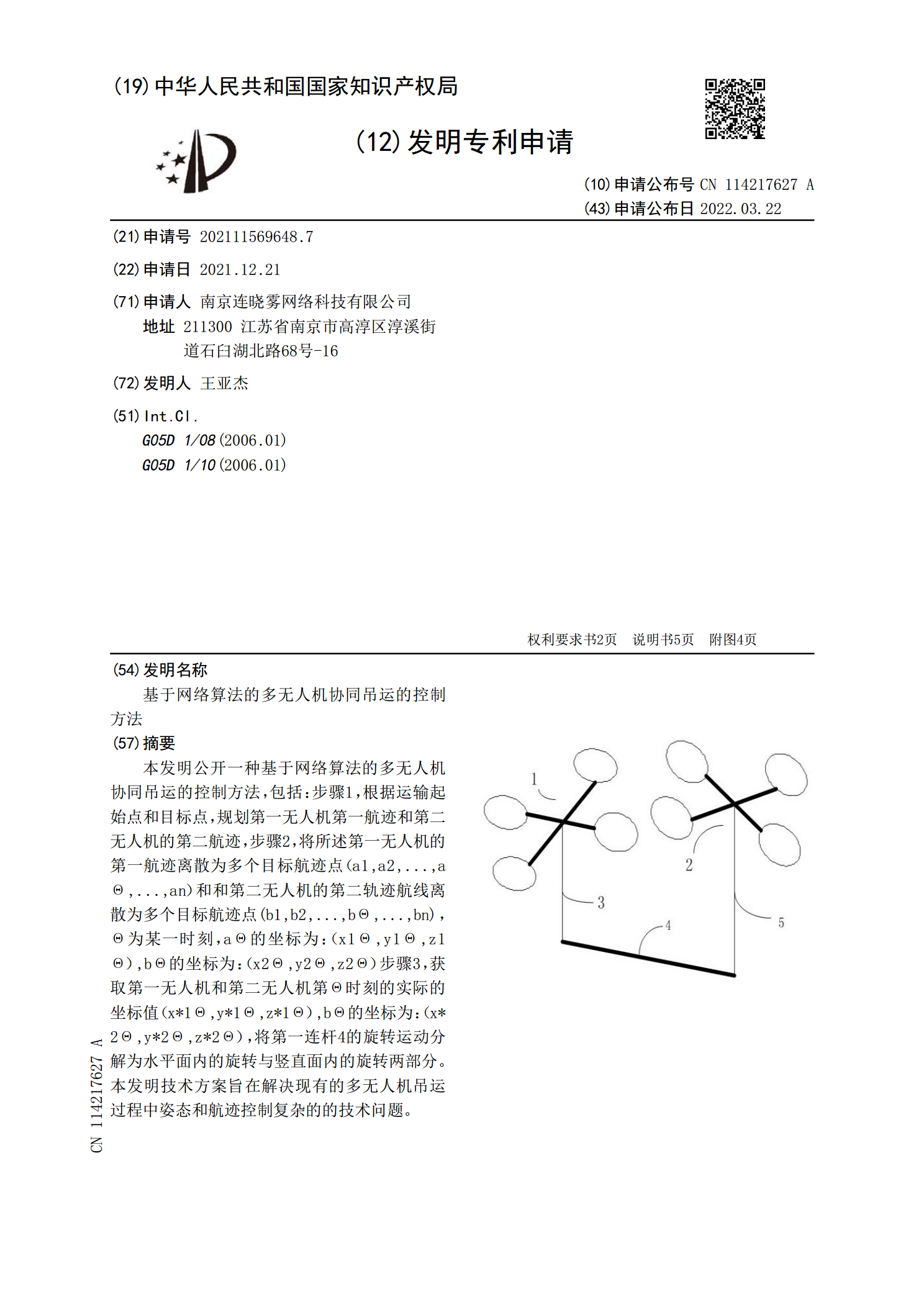
本发明公开一种基于网络算法的多无人机协同吊运的控制方法,包括:步骤1,根据运输起始点和目标点,规划第一无人机第一航迹和第二无人机的第二航迹,步骤2,将所述第一无人机的第一航迹离散为多个目标航迹点(a1,a2,...,aΘ,...,an)和和第二无人机的第二轨迹航线离散为多个目标航迹点(b1,b2,...,bΘ,...,bn),Θ为某一时刻,aΘ的坐标为:(x1Θ,y1Θ,z1Θ),bΘ的坐标为:(x2Θ,y2Θ,z2Θ)步骤3,获取第一无人机和第二无人机第Θ时刻的实际的坐标值(x*1Θ,y*1Θ,z*1Θ