
一种基于图论的多无人机协同控制方法.pdf

葫芦****io

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于图论的多无人机协同控制方法.pdf
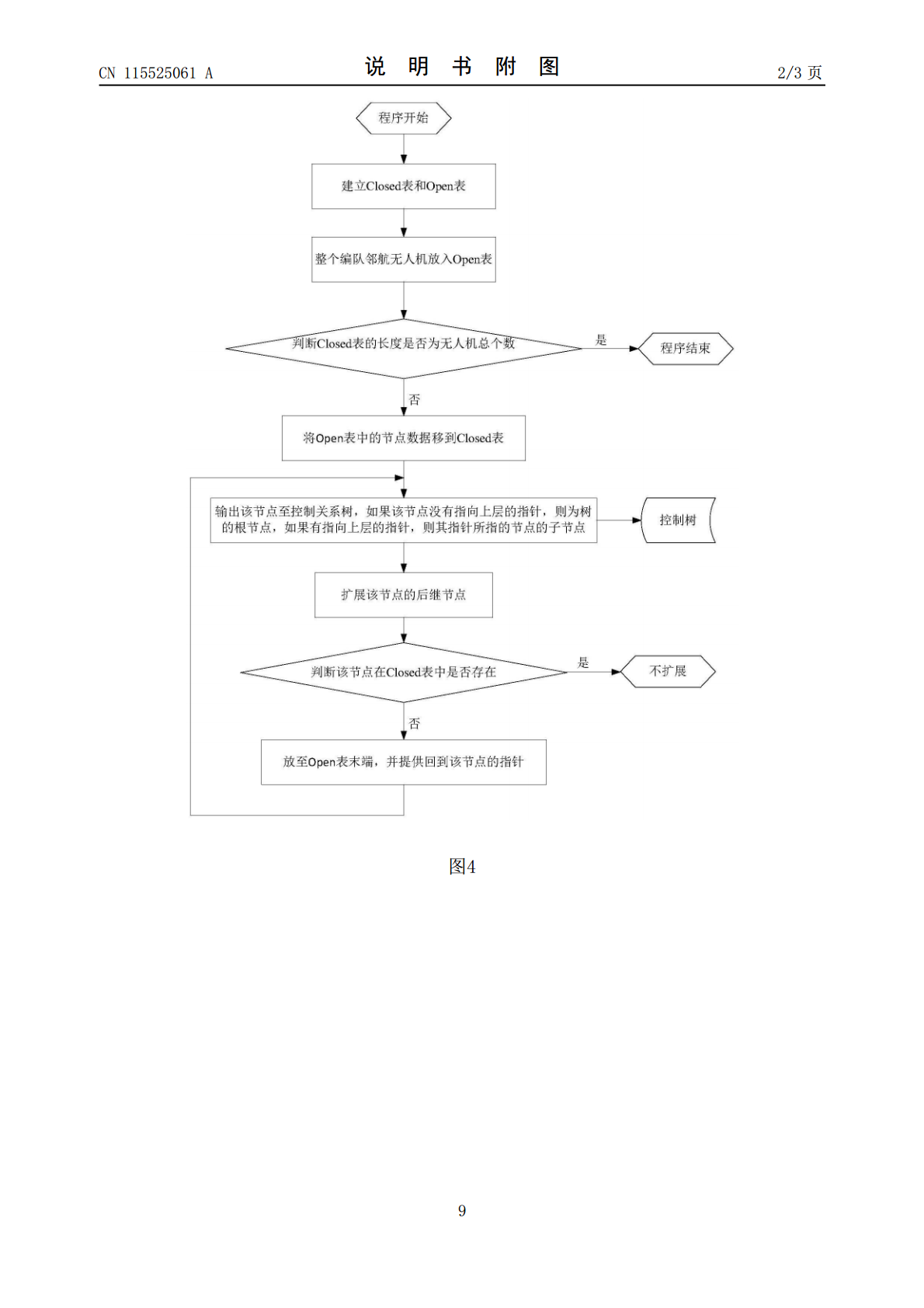
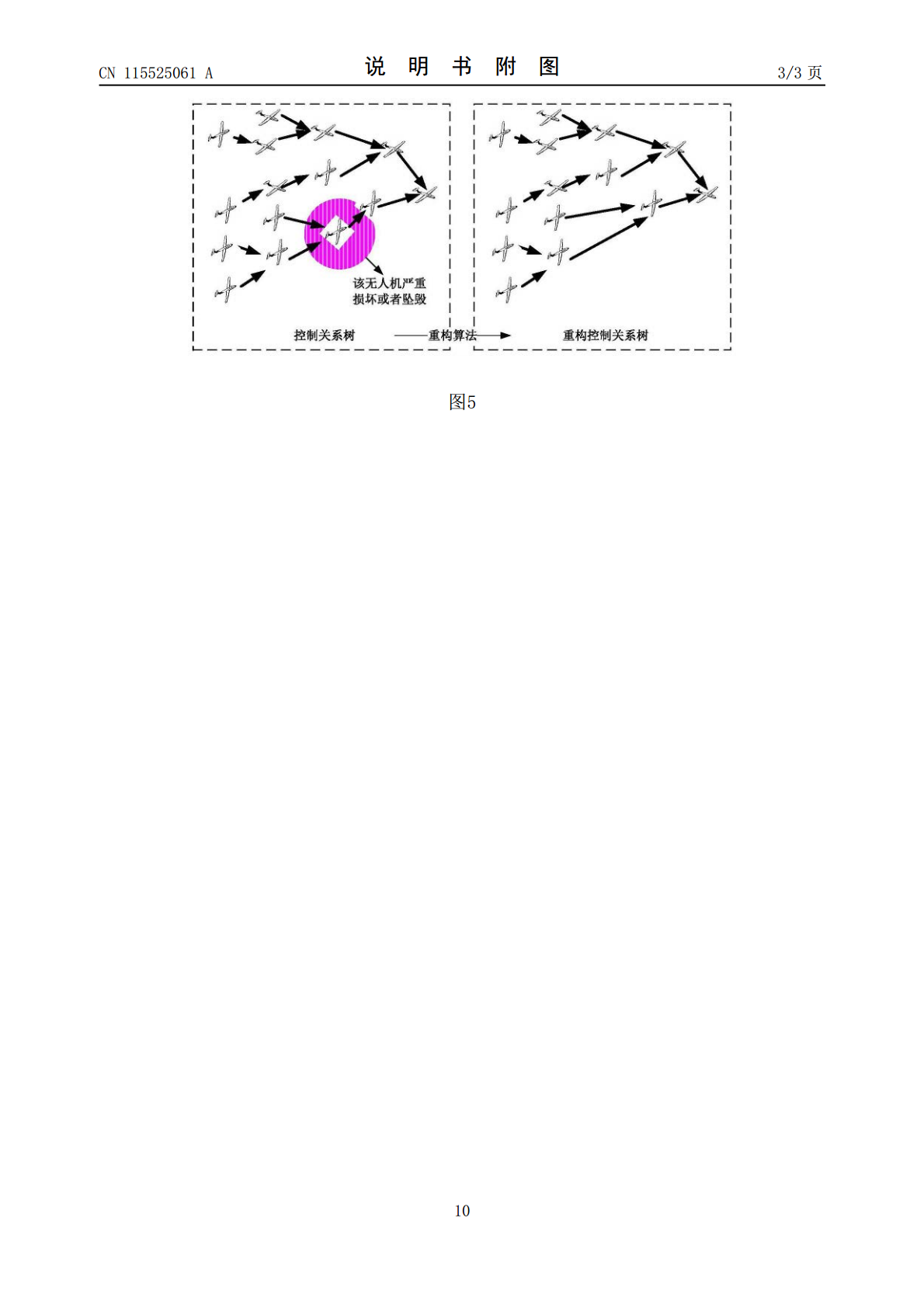
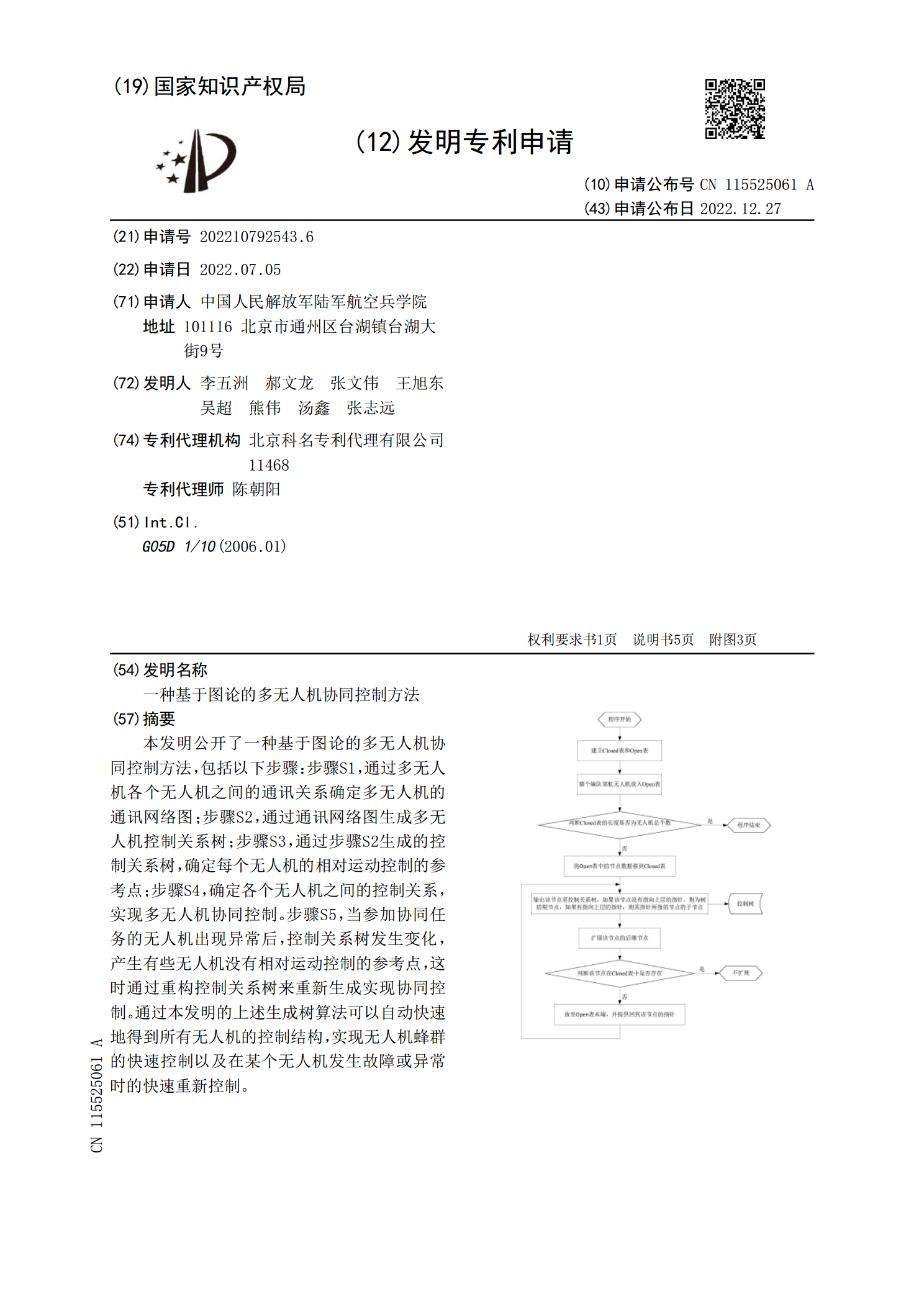
本发明公开了一种基于图论的多无人机协同控制方法,包括以下步骤:步骤S1,通过多无人机各个无人机之间的通讯关系确定多无人机的通讯网络图;步骤S2,通过通讯网络图生成多无人机控制关系树;步骤S3,通过步骤S2生成的控制关系树,确定每个无人机的相对运动控制的参考点;步骤S4,确定各个无人机之间的控制关系,实现多无人机协同控制。步骤S5,当参加协同任务的无人机出现异常后,控制关系树发生变化,产生有些无人机没有相对运动控制的参考点,这时通过重构控制关系树来重新生成实现协同控制。通过本发明的上述生成树算法可以自动快速
多无人机协同控制方法和装置.pdf
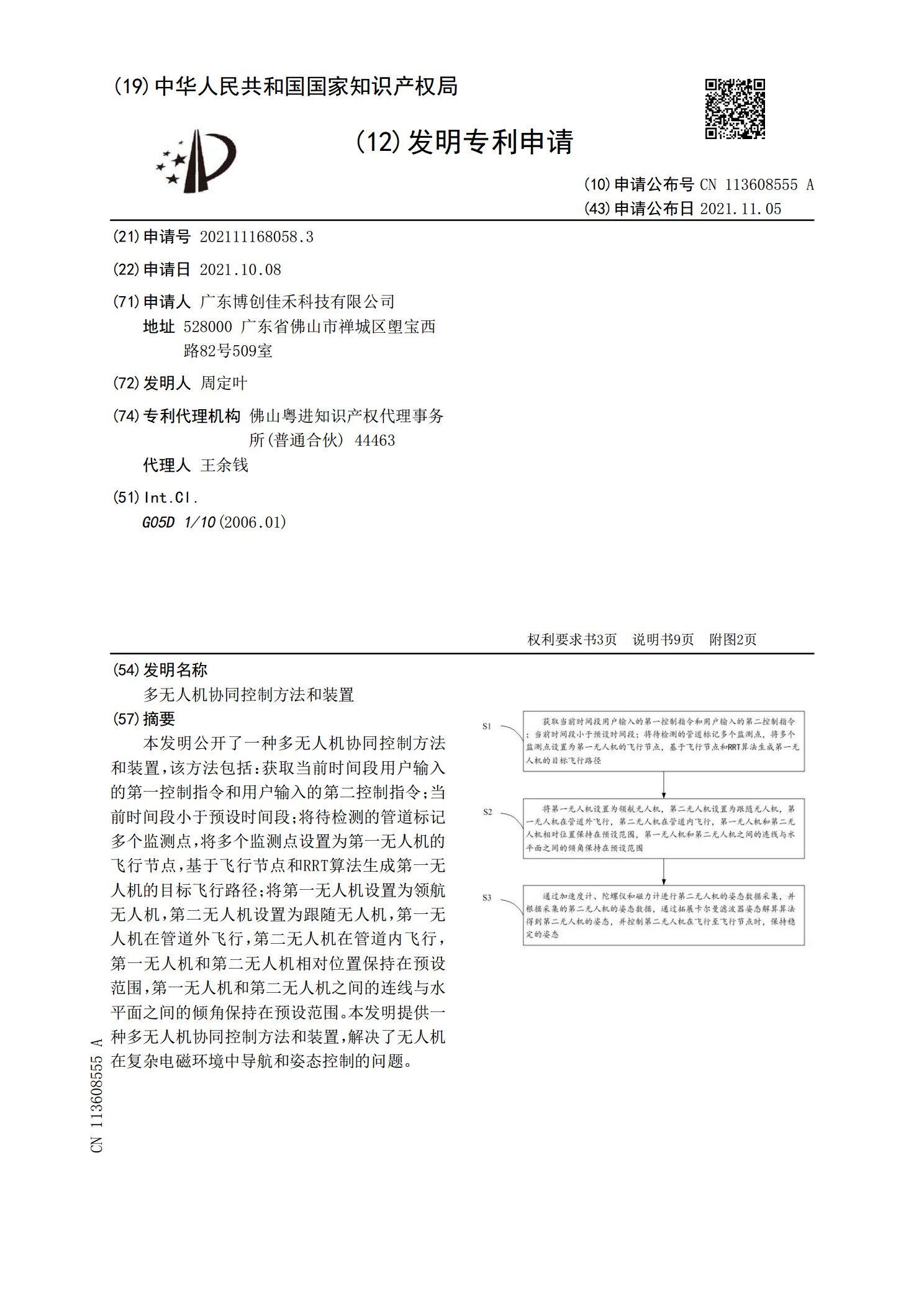
本发明公开了一种多无人机协同控制方法和装置,该方法包括:获取当前时间段用户输入的第一控制指令和用户输入的第二控制指令;当前时间段小于预设时间段;将待检测的管道标记多个监测点,将多个监测点设置为第一无人机的飞行节点,基于飞行节点和RRT算法生成第一无人机的目标飞行路径;将第一无人机设置为领航无人机,第二无人机设置为跟随无人机,第一无人机在管道外飞行,第二无人机在管道内飞行,第一无人机和第二无人机相对位置保持在预设范围,第一无人机和第二无人机之间的连线与水平面之间的倾角保持在预设范围。本发明提供一种多无人机协
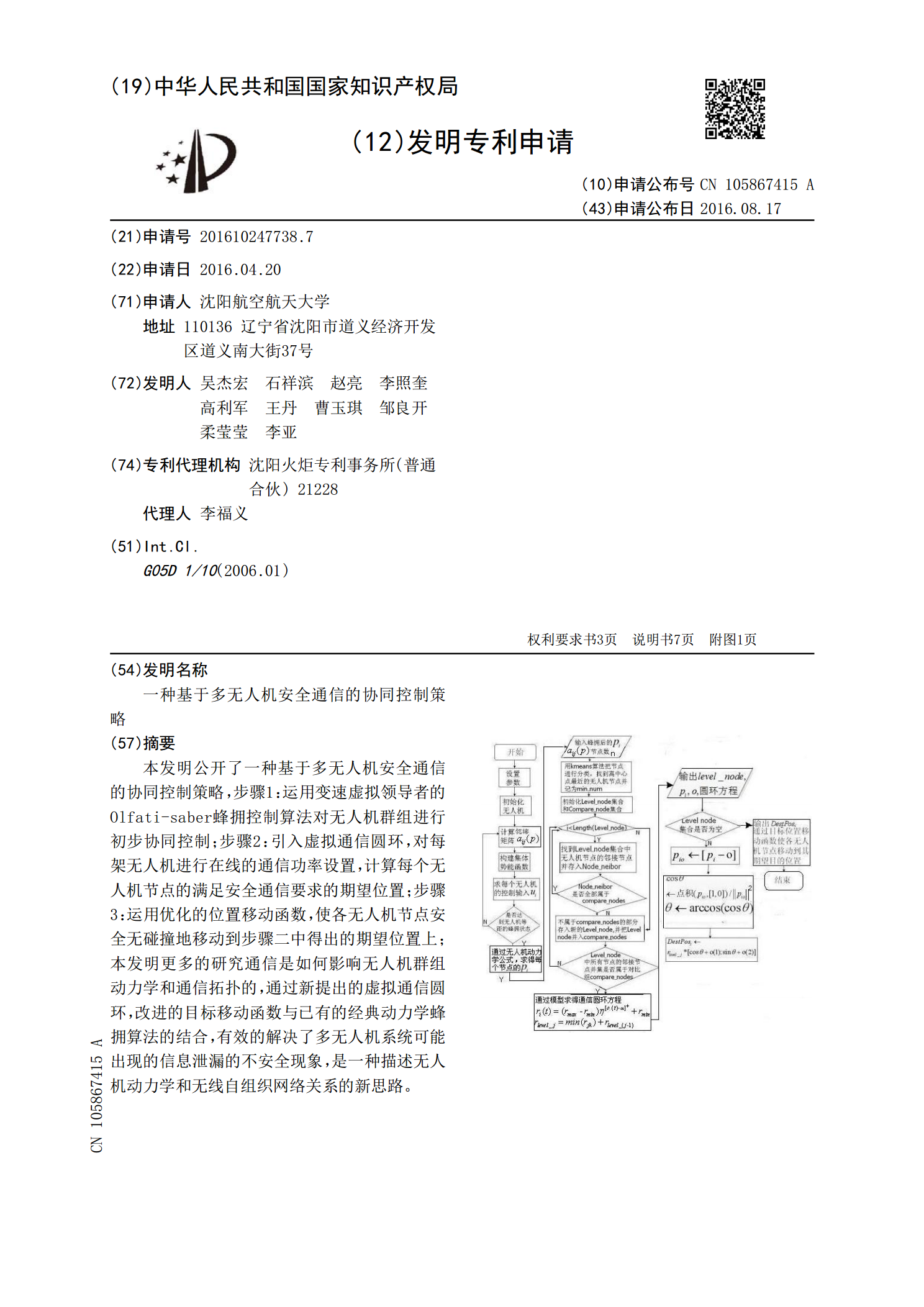
一种基于多无人机安全通信的协同控制策略.pdf
本发明公开了一种基于多无人机安全通信的协同控制策略,步骤1:运用变速虚拟领导者的Olfati‑saber蜂拥控制算法对无人机群组进行初步协同控制;步骤2:引入虚拟通信圆环,对每架无人机进行在线的通信功率设置,计算每个无人机节点的满足安全通信要求的期望位置;步骤3:运用优化的位置移动函数,使各无人机节点安全无碰撞地移动到步骤二中得出的期望位置上;本发明更多的研究通信是如何影响无人机群组动力学和通信拓扑的,通过新提出的虚拟通信圆环,改进的目标移动函数与已有的经典动力学蜂拥算法的结合,有效的解决了多无人机系统可
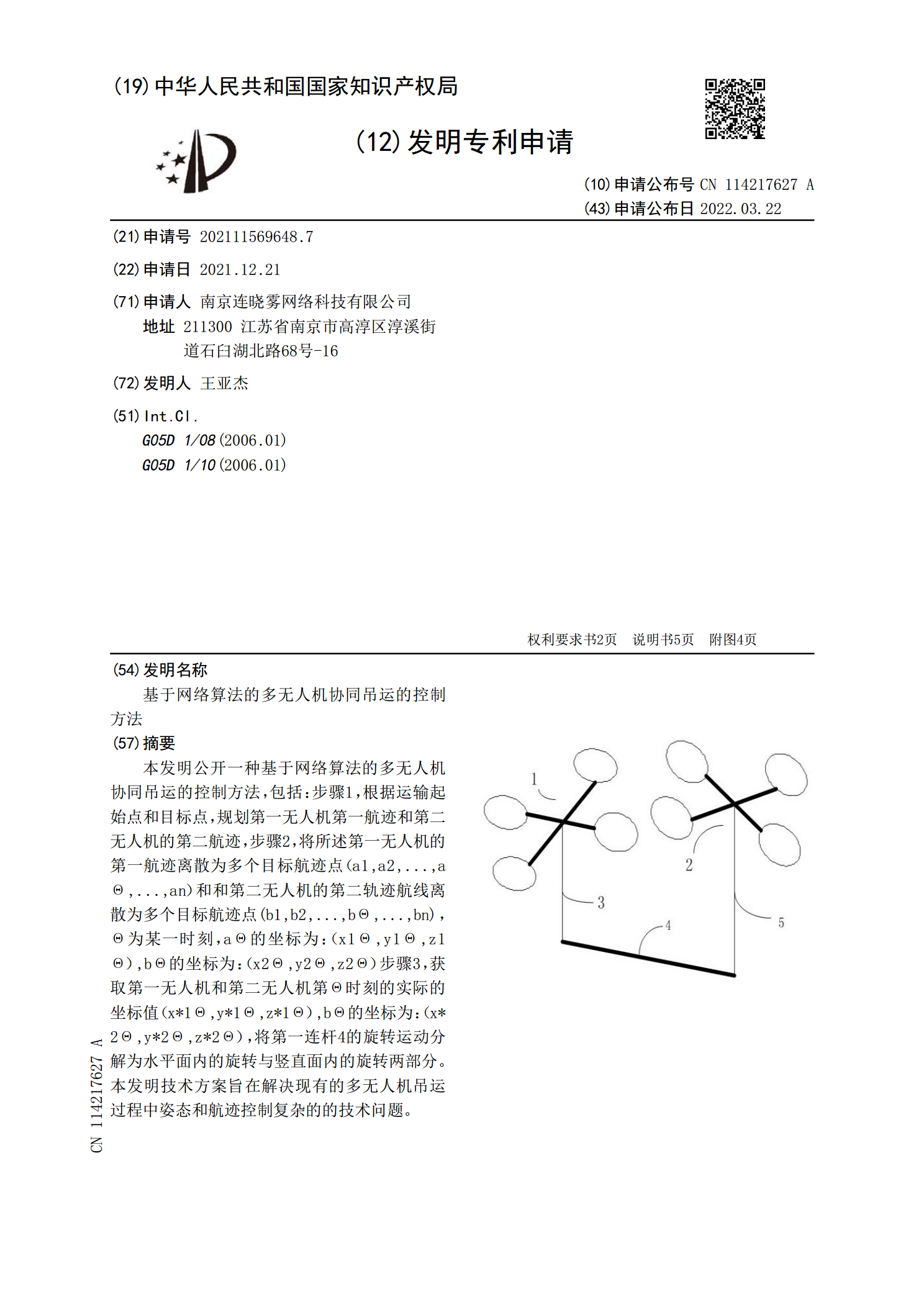
基于网络算法的多无人机协同吊运的控制方法.pdf
本发明公开一种基于网络算法的多无人机协同吊运的控制方法,包括:步骤1,根据运输起始点和目标点,规划第一无人机第一航迹和第二无人机的第二航迹,步骤2,将所述第一无人机的第一航迹离散为多个目标航迹点(a1,a2,...,aΘ,...,an)和和第二无人机的第二轨迹航线离散为多个目标航迹点(b1,b2,...,bΘ,...,bn),Θ为某一时刻,aΘ的坐标为:(x1Θ,y1Θ,z1Θ),bΘ的坐标为:(x2Θ,y2Θ,z2Θ)步骤3,获取第一无人机和第二无人机第Θ时刻的实际的坐标值(x*1Θ,y*1Θ,z*1Θ
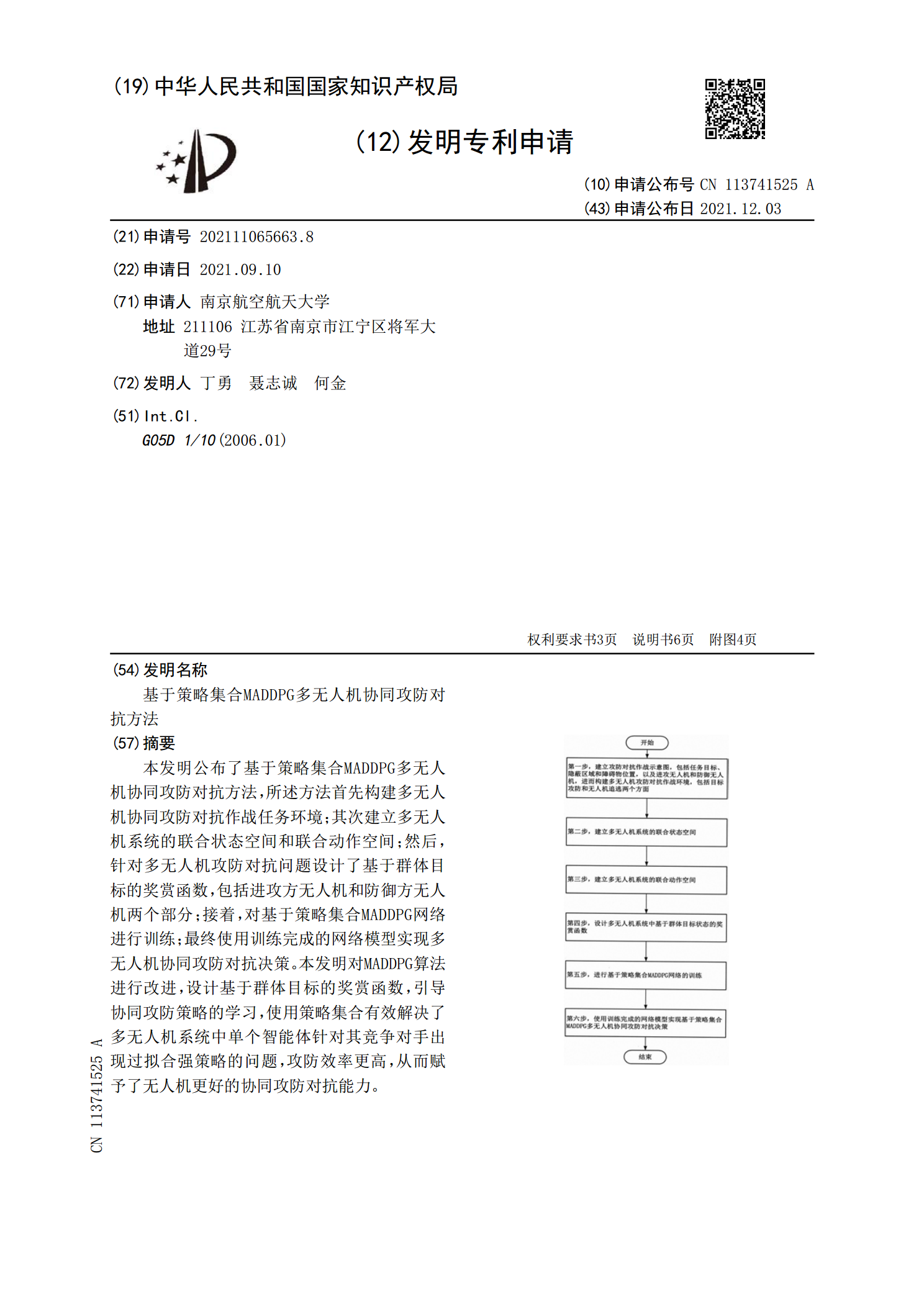
基于策略集合MADDPG多无人机协同攻防对抗方法.pdf
本发明公布了基于策略集合MADDPG多无人机协同攻防对抗方法,所述方法首先构建多无人机协同攻防对抗作战任务环境;其次建立多无人机系统的联合状态空间和联合动作空间;然后,针对多无人机攻防对抗问题设计了基于群体目标的奖赏函数,包括进攻方无人机和防御方无人机两个部分;接着,对基于策略集合MADDPG网络进行训练;最终使用训练完成的网络模型实现多无人机协同攻防对抗决策。本发明对MADDPG算法进行改进,设计基于群体目标的奖赏函数,引导协同攻防策略的学习,使用策略集合有效解决了多无人机系统中单个智能体针对其竞争对手