
多无人机与车辆协同巡检的路径优化方法和装置.pdf

邻家****mk


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多无人机与车辆协同巡检的路径优化方法和装置.pdf
本发明提供一种多无人机与车辆协同巡检的路径优化方法和装置,涉及任务分配领域。本发明通过获取需要巡检的目标点信息和巡检资源信息;基于所述需要巡检的目标点信息和巡检资源信息,以最短时间为目标构建开放式车机协同路径模型;通过设有双适应度函数的遗传算法对开放式车机协同路径模型进行求解,获取车辆与无人机协同访问的最优任务分配路径规划方案。本发明的遗传算法采用双适应度函数能够有效降低获得近似最优解的运算时间,获得问题的满意解,从而减少车辆与无人机协同完成任务的总时长。
车辆与多无人机协同路径规划方法、装置、终端及介质.pdf
本发明涉及一种车辆与多无人机协同路径规划方法、装置、终端及介质。该方法根据目标区域集合中待搜索区域确定无人机覆盖路径;根据映射点确定车辆规划路径,根据起飞点、覆盖路径以及降落点构建无人机航路集合,采用迭代松弛算法对无人机航路集合与车辆规划路径进行迭代优化,得到车辆与多无人机协同覆盖侦察最优路径规划。本方法设计了基于真实道路网的起飞点与降落点位置的无人机航路,在真实道路网任意节点都能够起飞和降落,起飞点与降落点选择较为灵活,节约了侦察时间;再通过迭代松弛算法对无人机航路集合与所述车辆规划路径进行迭代优化,可
多无人机协同控制方法和装置.pdf
本发明公开了一种多无人机协同控制方法和装置,该方法包括:获取当前时间段用户输入的第一控制指令和用户输入的第二控制指令;当前时间段小于预设时间段;将待检测的管道标记多个监测点,将多个监测点设置为第一无人机的飞行节点,基于飞行节点和RRT算法生成第一无人机的目标飞行路径;将第一无人机设置为领航无人机,第二无人机设置为跟随无人机,第一无人机在管道外飞行,第二无人机在管道内飞行,第一无人机和第二无人机相对位置保持在预设范围,第一无人机和第二无人机之间的连线与水平面之间的倾角保持在预设范围。本发明提供一种多无人机协
车辆与无人机协同巡检的路径规划方法及系统.pdf
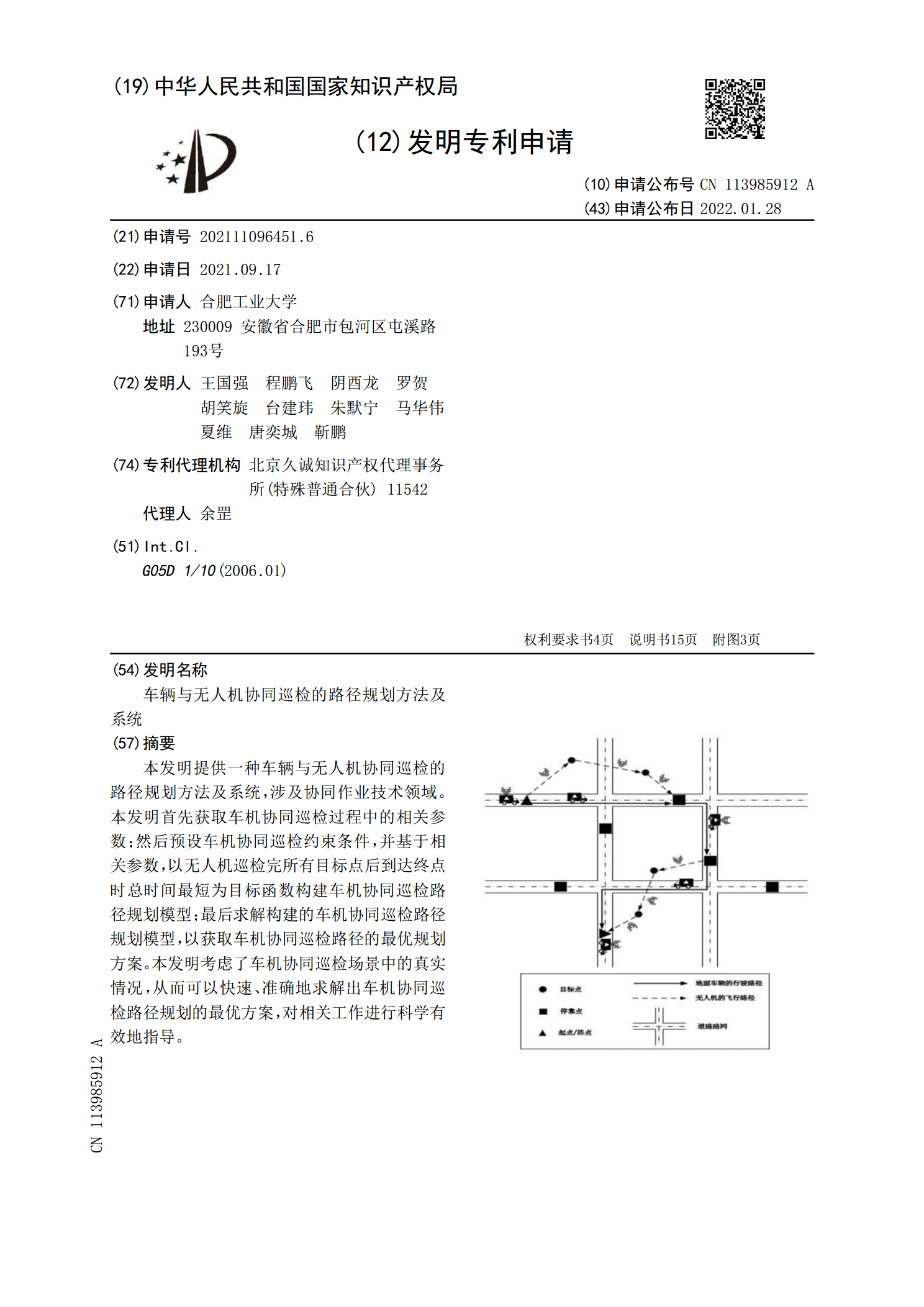
本发明提供一种车辆与无人机协同巡检的路径规划方法及系统,涉及协同作业技术领域。本发明首先获取车机协同巡检过程中的相关参数;然后预设车机协同巡检约束条件,并基于相关参数,以无人机巡检完所有目标点后到达终点时总时间最短为目标函数构建车机协同巡检路径规划模型;最后求解构建的车机协同巡检路径规划模型,以获取车机协同巡检路径的最优规划方案。本发明考虑了车机协同巡检场景中的真实情况,从而可以快速、准确地求解出车机协同巡检路径规划的最优方案,对相关工作进行科学有效地指导。
多无人机均衡路径规划方法及装置.pdf
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN116026341A(43)申请公布日2023.04.28(21)申请号202310300673.8(22)申请日2023.03.27(71)申请人中国人民解放军国防科技大学地址410003湖南省长沙市开福区德雅路109号(72)发明人刘青宝包卫东贾志强王吉张亮(74)专利代理机构北京风雅颂专利代理有限公司11403专利代理师曾志鹏(51)Int.Cl.G01C21/20(2006.01)权利要求书2页说明书7页附图3页(54)发明名称多无人