
一种针对多源干扰的无人机机械臂末端位姿控制方法.pdf

一吃****继勇

1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种针对多源干扰的无人机机械臂末端位姿控制方法.pdf
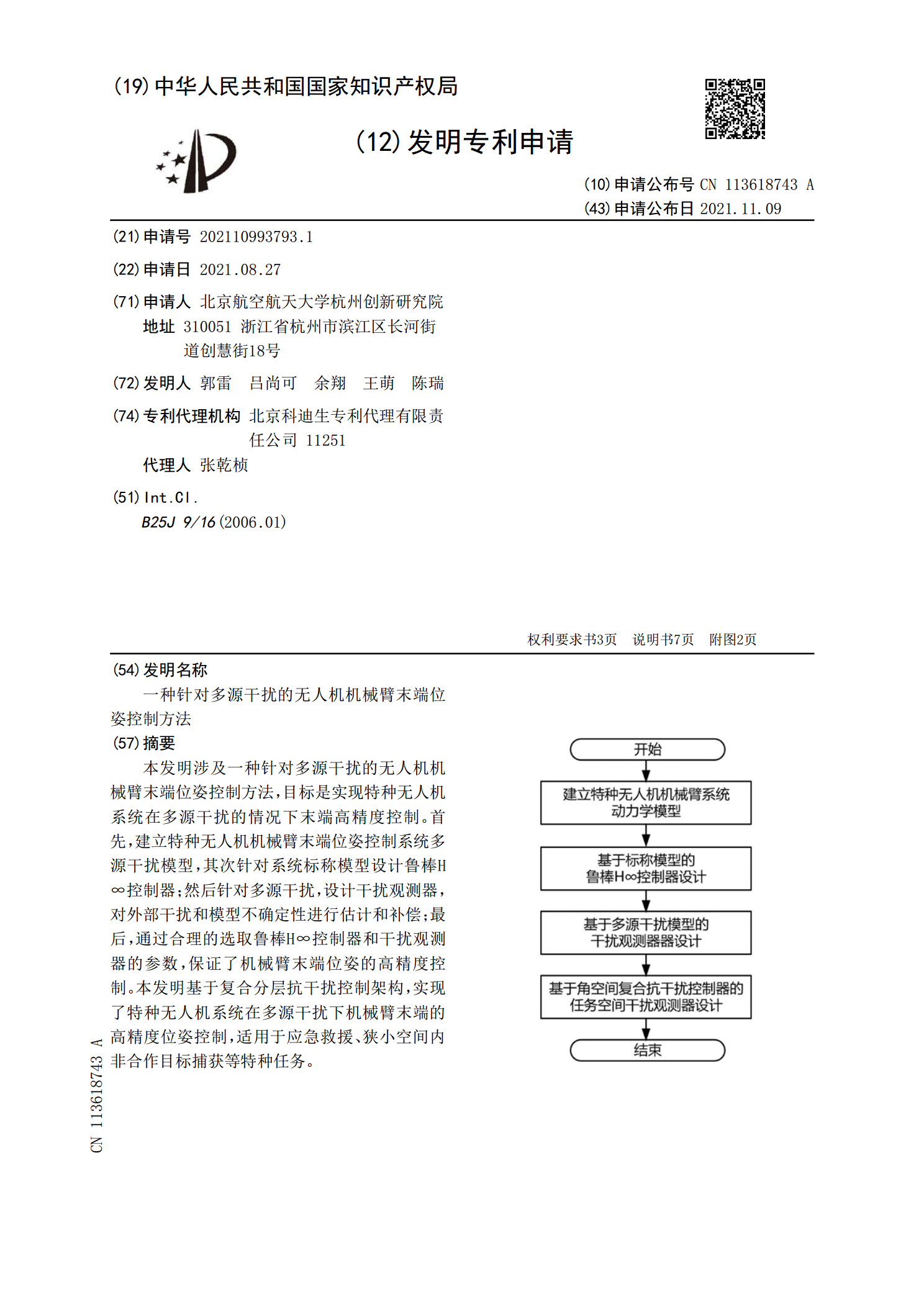
本发明涉及一种针对多源干扰的无人机机械臂末端位姿控制方法,目标是实现特种无人机系统在多源干扰的情况下末端高精度控制。首先,建立特种无人机机械臂末端位姿控制系统多源干扰模型,其次针对系统标称模型设计鲁棒H∞控制器;然后针对多源干扰,设计干扰观测器,对外部干扰和模型不确定性进行估计和补偿;最后,通过合理的选取鲁棒H∞控制器和干扰观测器的参数,保证了机械臂末端位姿的高精度控制。本发明基于复合分层抗干扰控制架构,实现了特种无人机系统在多源干扰下机械臂末端的高精度位姿控制,适用于应急救援、狭小空间内非合作目标捕获等
一种机械臂末端位姿误差测量方法及系统.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN112880562A(43)申请公布日2021.06.01(21)申请号CN202110070623.6(22)申请日2021.01.19(71)申请人佛山职业技术学院地址528137广东省佛山市三水区乐平镇职教路3号佛山职业技术学院(72)发明人张炜耿金华朱炯光邵鹏尹树彬(74)专利代理机构44205广州嘉权专利商标事务所有限公司代理人谭志鹏(51)Int.CIG01B11/00(20060101)G06T7/00(2017
一种机械臂末端位姿误差测量方法及系统.pdf
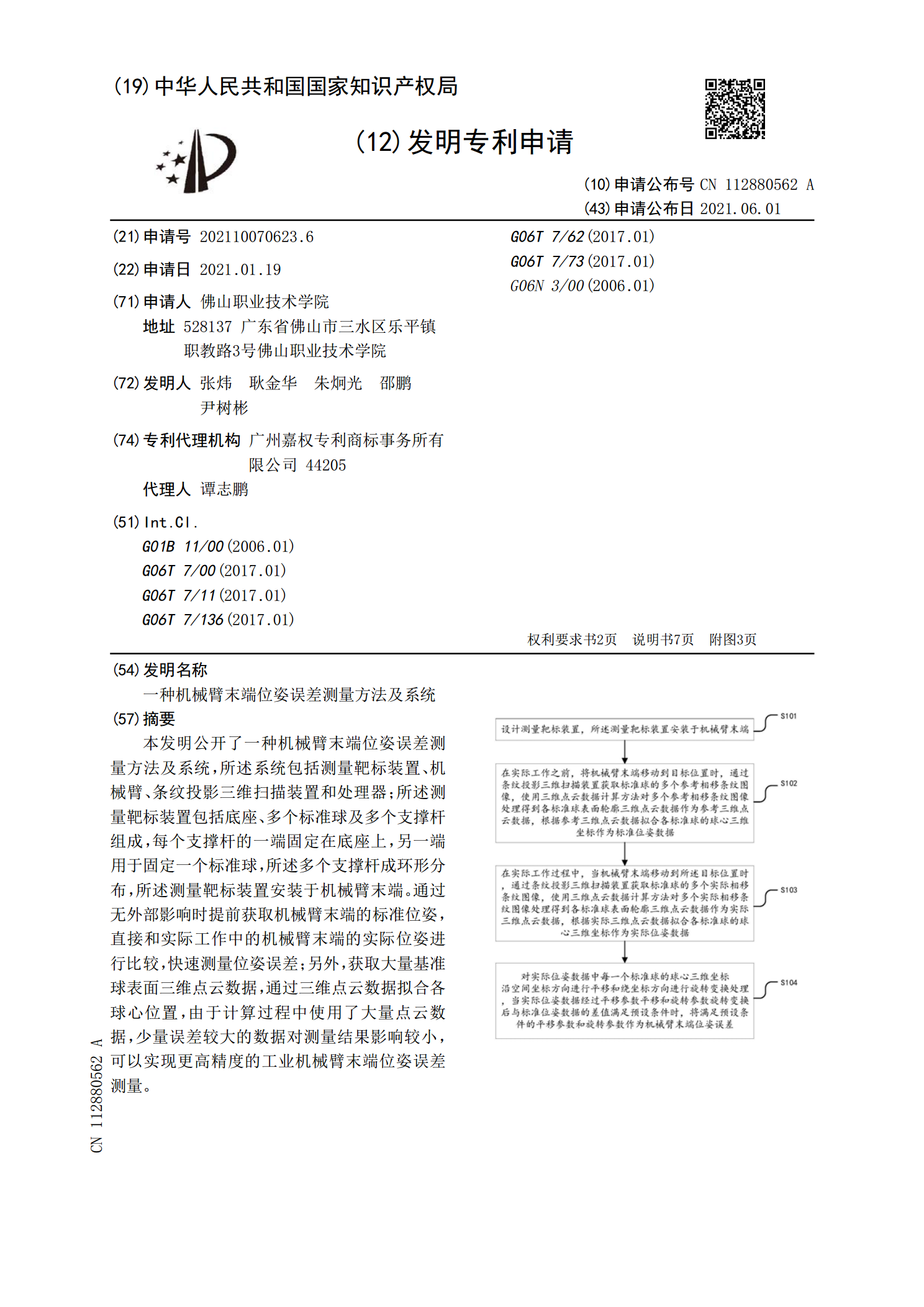
本发明公开了一种机械臂末端位姿误差测量方法及系统,所述系统包括测量靶标装置、机械臂、条纹投影三维扫描装置和处理器;所述测量靶标装置包括底座、多个标准球及多个支撑杆组成,每个支撑杆的一端固定在底座上,另一端用于固定一个标准球,所述多个支撑杆成环形分布,所述测量靶标装置安装于机械臂末端。通过无外部影响时提前获取机械臂末端的标准位姿,直接和实际工作中的机械臂末端的实际位姿进行比较,快速测量位姿误差;另外,获取大量基准球表面三维点云数据,通过三维点云数据拟合各球心位置,由于计算过程中使用了大量点云数据,少量误差较

基于MATLAB GUI的机械臂末端位姿评价系统设计与实现.docx
基于MATLABGUI的机械臂末端位姿评价系统设计与实现1.研究背景机械臂作为一种智能化机械装置,已广泛应用于制造业、医疗卫生、交通运输等各个领域,其庞大的运动自由度和高精度的控制特性,给人类工业和生产活动带来了诸多便利。机械臂的末端位姿评价是机械臂控制的关键要素之一,机械臂应用中的每一项任务都需要对其末端位姿进行精准评价。为此,设计一款基于MATLABGUI的机械臂末端位姿评价系统,可以更好地满足实际需求。2.系统设计系统设计中的重点是对机械臂末端位姿的测量和评价,在此基础上,设计了以下几个部分。2.1
基于彩色球形光源靶标的机械臂末端位姿测量系统及方法.pdf
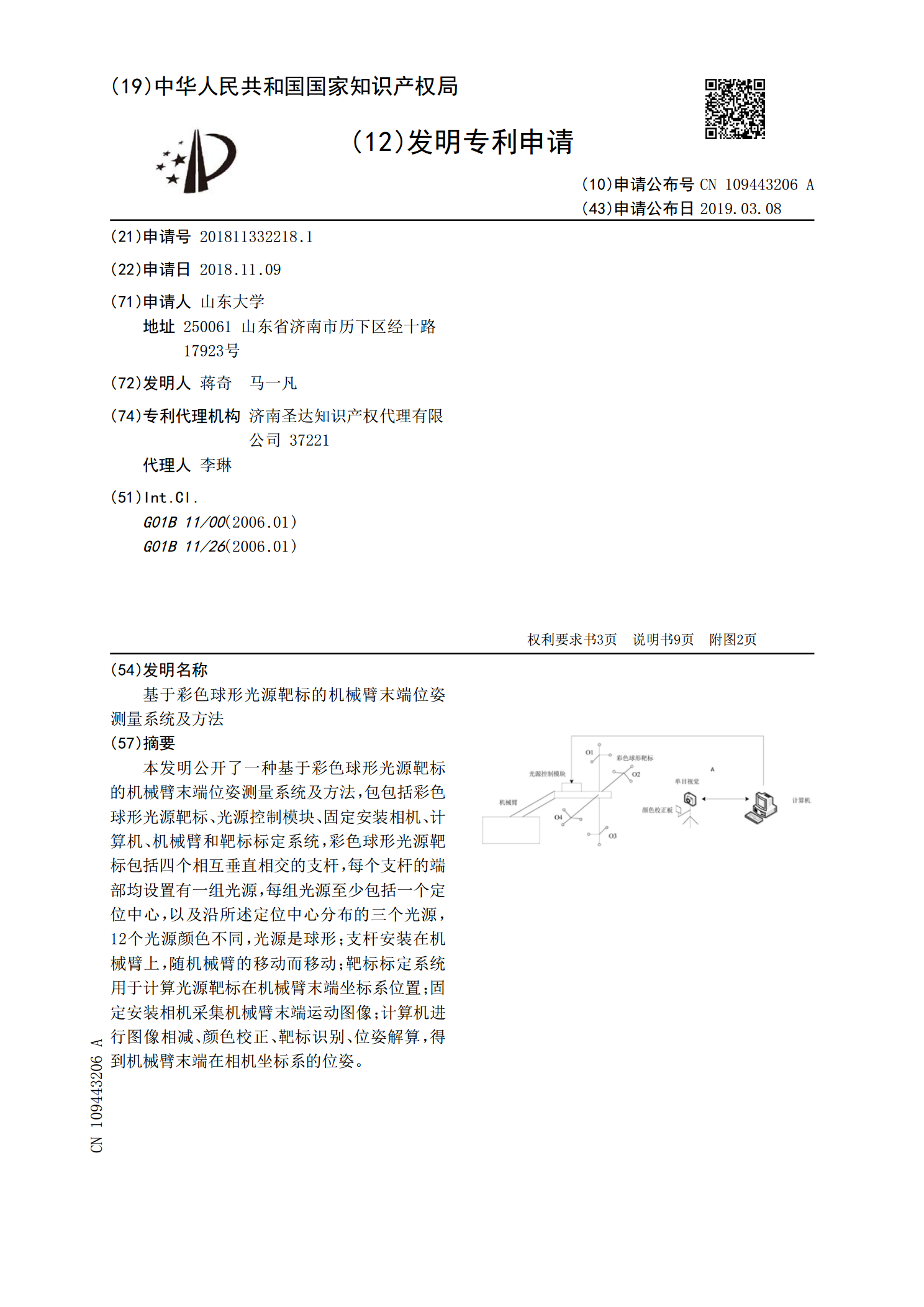
本发明公开了一种基于彩色球形光源靶标的机械臂末端位姿测量系统及方法,包包括彩色球形光源靶标、光源控制模块、固定安装相机、计算机、机械臂和靶标标定系统,彩色球形光源靶标包括四个相互垂直相交的支杆,每个支杆的端部均设置有一组光源,每组光源至少包括一个定位中心,以及沿所述定位中心分布的三个光源,12个光源颜色不同,光源是球形;支杆安装在机械臂上,随机械臂的移动而移动;靶标标定系统用于计算光源靶标在机械臂末端坐标系位置;固定安装相机采集机械臂末端运动图像;计算机进行图像相减、颜色校正、靶标识别、位姿解算,得到机械