
基于MATLAB GUI的机械臂末端位姿评价系统设计与实现.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于MATLAB GUI的机械臂末端位姿评价系统设计与实现.docx
基于MATLABGUI的机械臂末端位姿评价系统设计与实现1.研究背景机械臂作为一种智能化机械装置,已广泛应用于制造业、医疗卫生、交通运输等各个领域,其庞大的运动自由度和高精度的控制特性,给人类工业和生产活动带来了诸多便利。机械臂的末端位姿评价是机械臂控制的关键要素之一,机械臂应用中的每一项任务都需要对其末端位姿进行精准评价。为此,设计一款基于MATLABGUI的机械臂末端位姿评价系统,可以更好地满足实际需求。2.系统设计系统设计中的重点是对机械臂末端位姿的测量和评价,在此基础上,设计了以下几个部分。2.1

基于深度学习的机械臂位姿估计系统的设计与实现的开题报告.docx
基于深度学习的机械臂位姿估计系统的设计与实现的开题报告一、课题背景与研究意义机器人技术一直是人类探索未来科技的重要方向之一,其中机械臂作为机器人的重要组成部分,广泛应用于工业自动化、医疗卫生、教育科研以及航空航天等领域,而机械臂位姿估计是机器人技术中的重要研究领域之一。机械臂位姿估计是指通过对机械臂进行视觉分析及处理,获取机械臂当前位置和姿态信息的过程,对于机器人的自主定位、路径规划和操作调整具有重要的作用。目前,机械臂位姿估计技术主要包括基于运动模型、基于滤波器、基于视觉SLAM、基于深度学习等多种方法

基于深度学习的机械臂位姿估计系统的设计与实现的任务书.docx
基于深度学习的机械臂位姿估计系统的设计与实现的任务书任务书一、任务背景机器人在制造工业领域、医疗卫生领域、军事安全领域等多个领域逐渐发挥着其不可替代的作用。在机器人中,机械臂可以模拟人类的手臂运动,进行复杂的精细操作,已经广泛地应用于自动化制造、无人车、智能家居等方面。机器人的控制及运动管理中,机械臂位姿估计是一个非常重要的问题,在实践过程中尤为突出。由于机器人的操作与控制很大程度上依赖于其位置和姿态,机械臂位置估计和姿态估计得到的结果十分重要。解决机械臂位姿估计问题是我们实现更加智能和灵活的机械臂操作的

基于视觉的清洗机械臂位姿检测系统设计与实现.docx
基于视觉的清洗机械臂位姿检测系统设计与实现基于视觉的清洗机械臂位姿检测系统设计与实现摘要:随着工业自动化的发展,机械臂在自动化生产中发挥着至关重要的作用。清洗机械臂是其中一个应用领域,但在实际应用过程中,机械臂的位姿检测一直是一个重要的问题。本文基于视觉技术,设计了一个清洗机械臂位姿检测系统,实现对机械臂位姿的准确检测和控制。实验结果表明,该系统能够准确地检测机械臂的位姿信息,满足清洗机械臂的实际应用需求。关键词:机械臂,位姿检测,视觉技术,清洗1.引言随着工业自动化的发展,机械臂在各个领域的应用愈发广泛
基于彩色球形光源靶标的机械臂末端位姿测量系统及方法.pdf
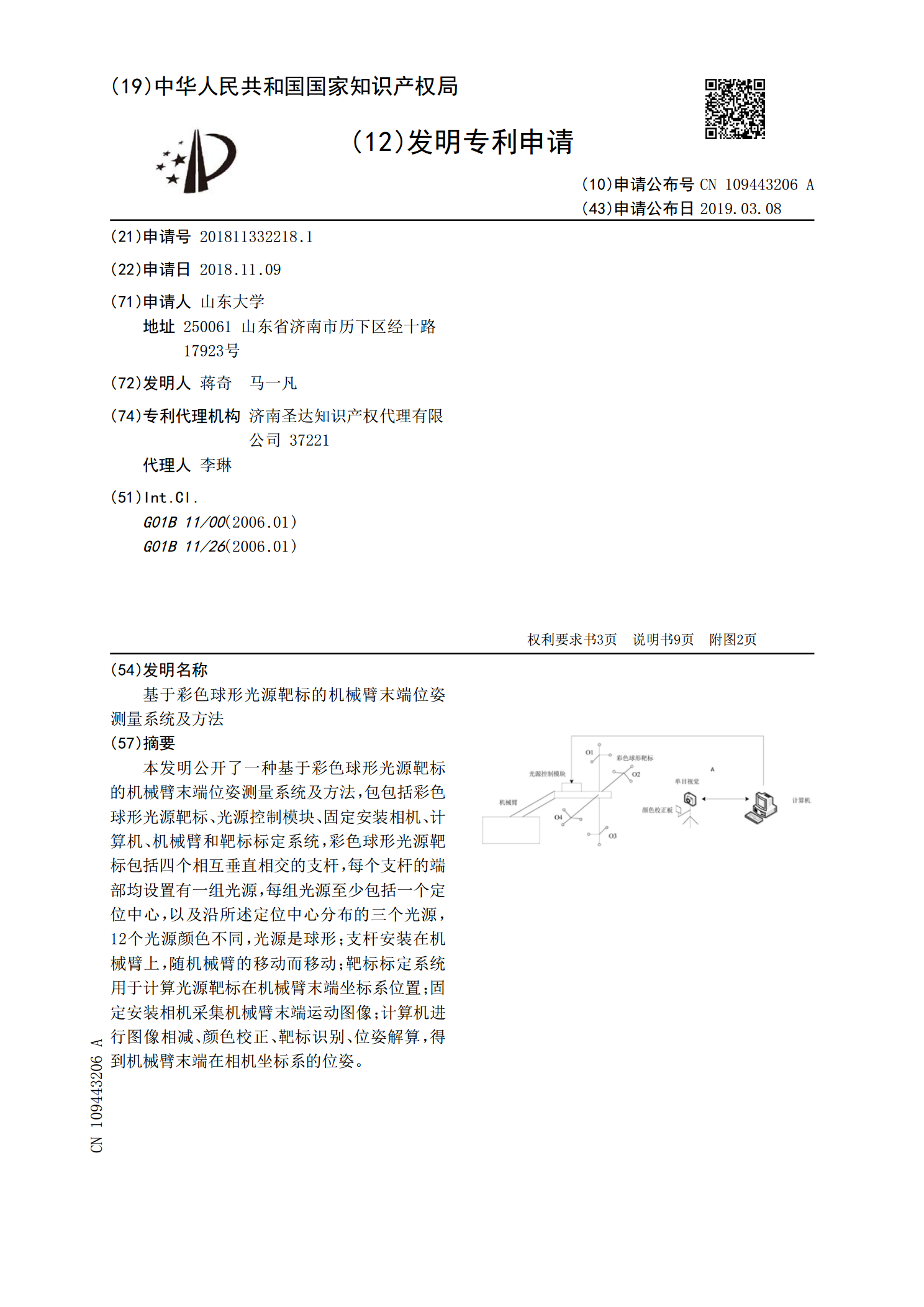
本发明公开了一种基于彩色球形光源靶标的机械臂末端位姿测量系统及方法,包包括彩色球形光源靶标、光源控制模块、固定安装相机、计算机、机械臂和靶标标定系统,彩色球形光源靶标包括四个相互垂直相交的支杆,每个支杆的端部均设置有一组光源,每组光源至少包括一个定位中心,以及沿所述定位中心分布的三个光源,12个光源颜色不同,光源是球形;支杆安装在机械臂上,随机械臂的移动而移动;靶标标定系统用于计算光源靶标在机械臂末端坐标系位置;固定安装相机采集机械臂末端运动图像;计算机进行图像相减、颜色校正、靶标识别、位姿解算,得到机械