
一种MEMS惯性组件及姿态修正方法.pdf

戊午****jj

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种MEMS惯性组件及姿态修正方法.pdf
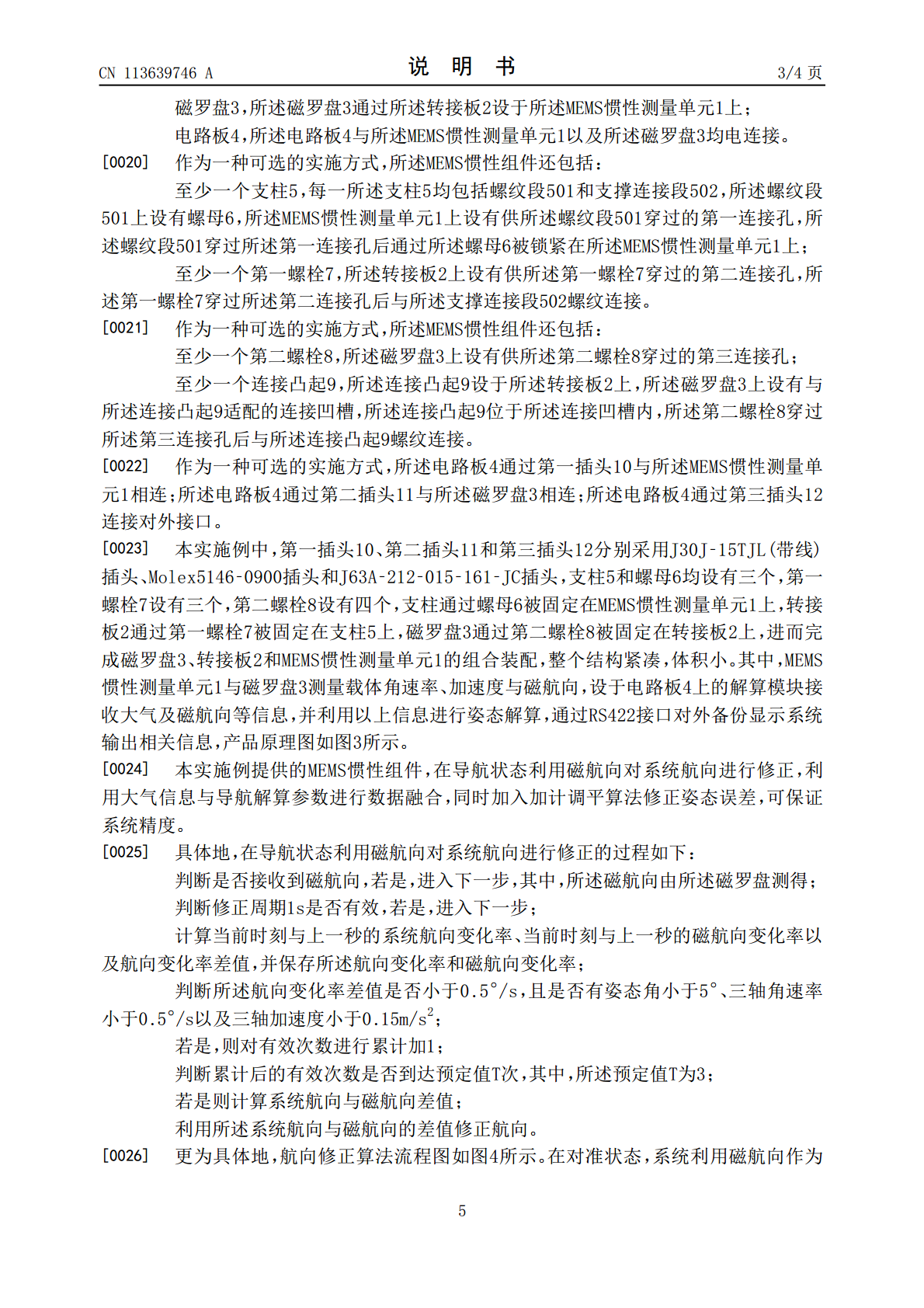
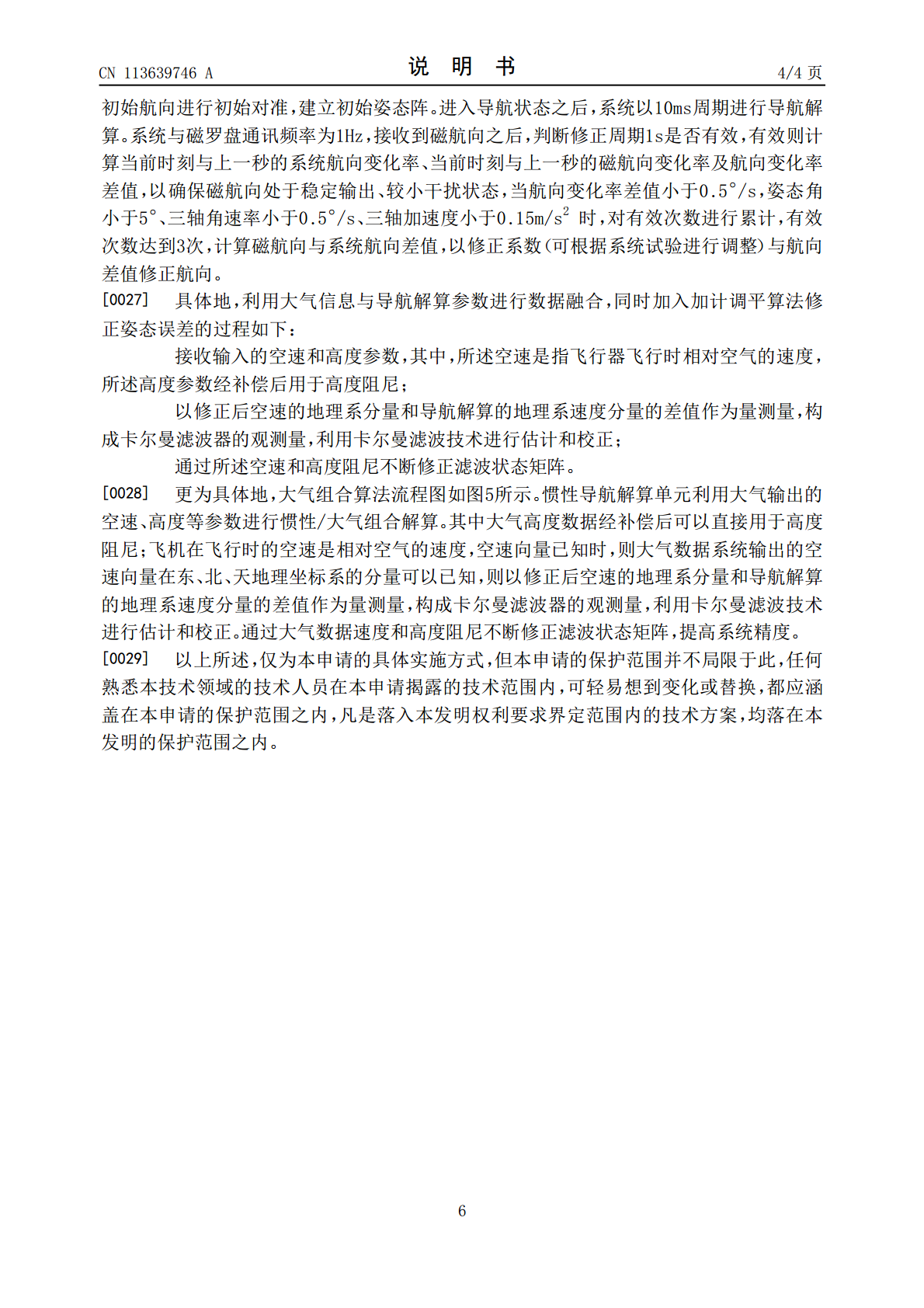
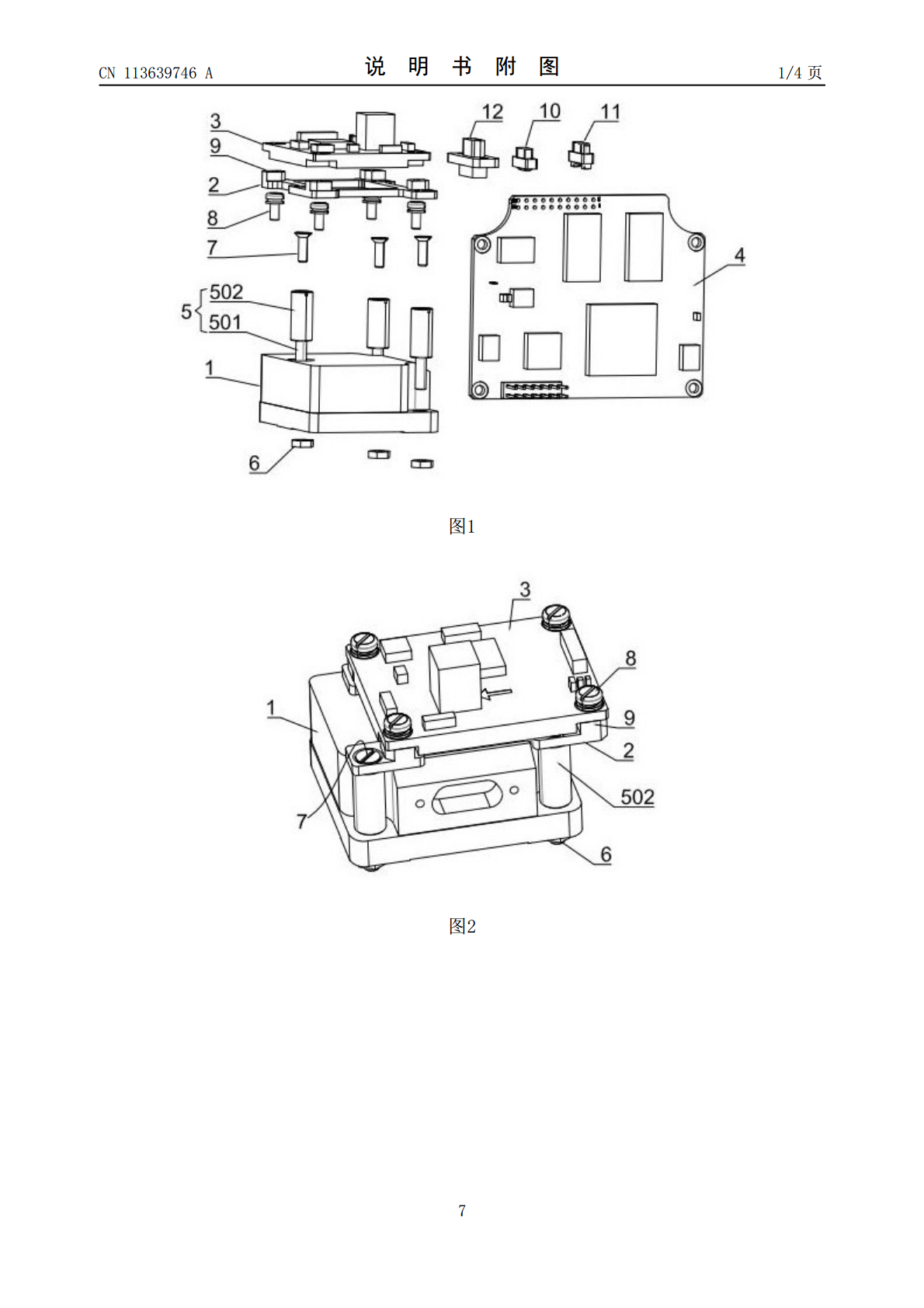
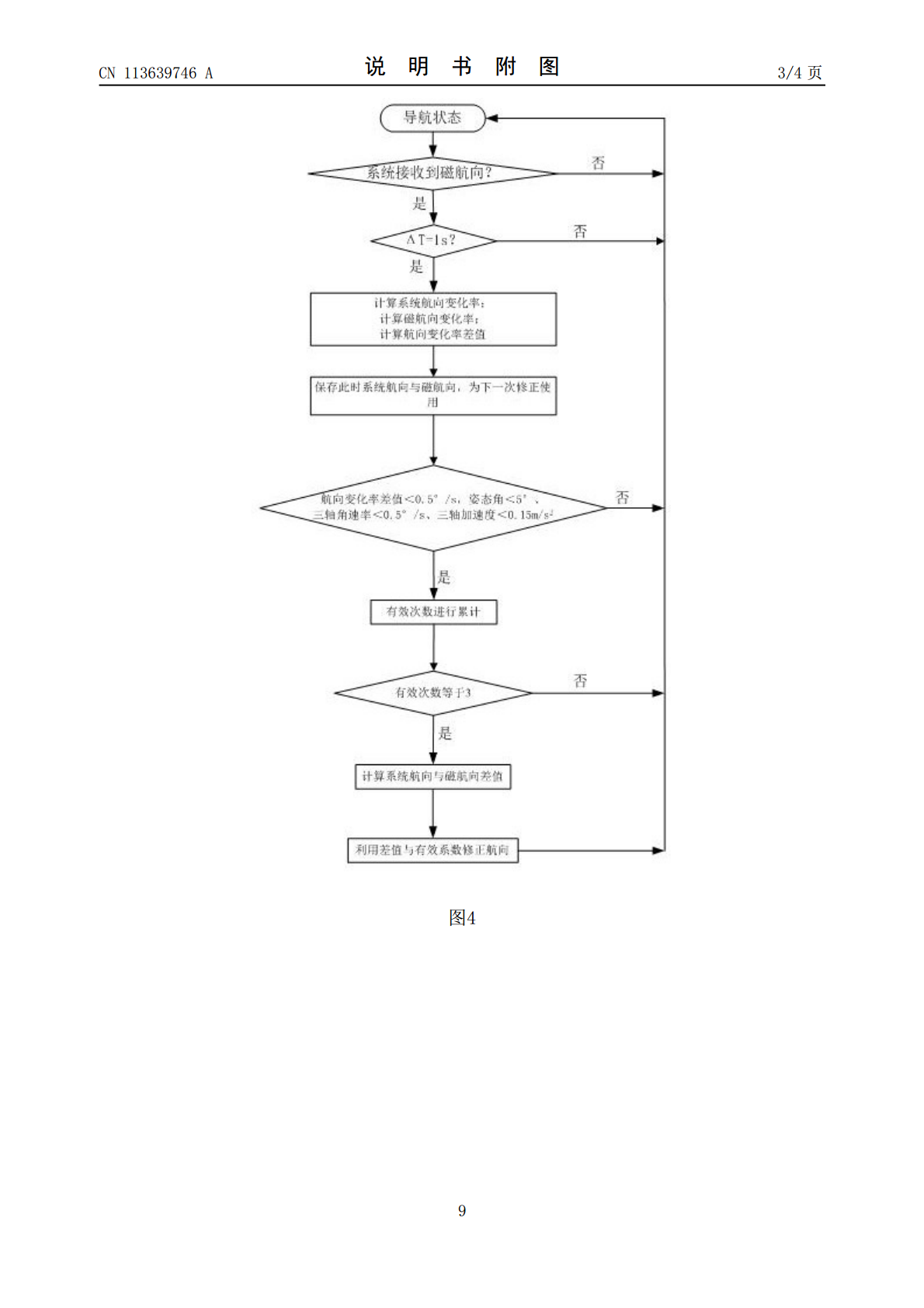
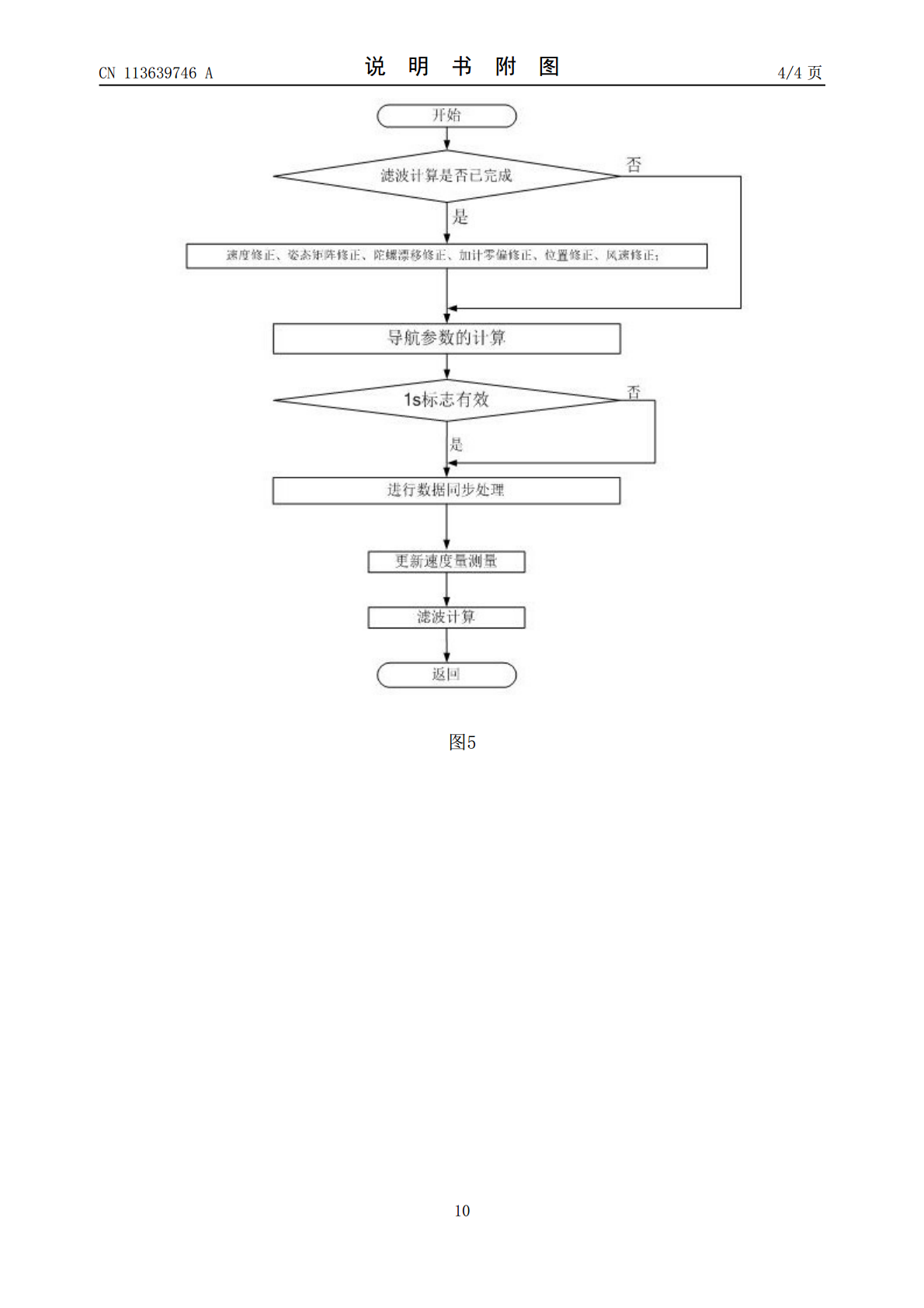
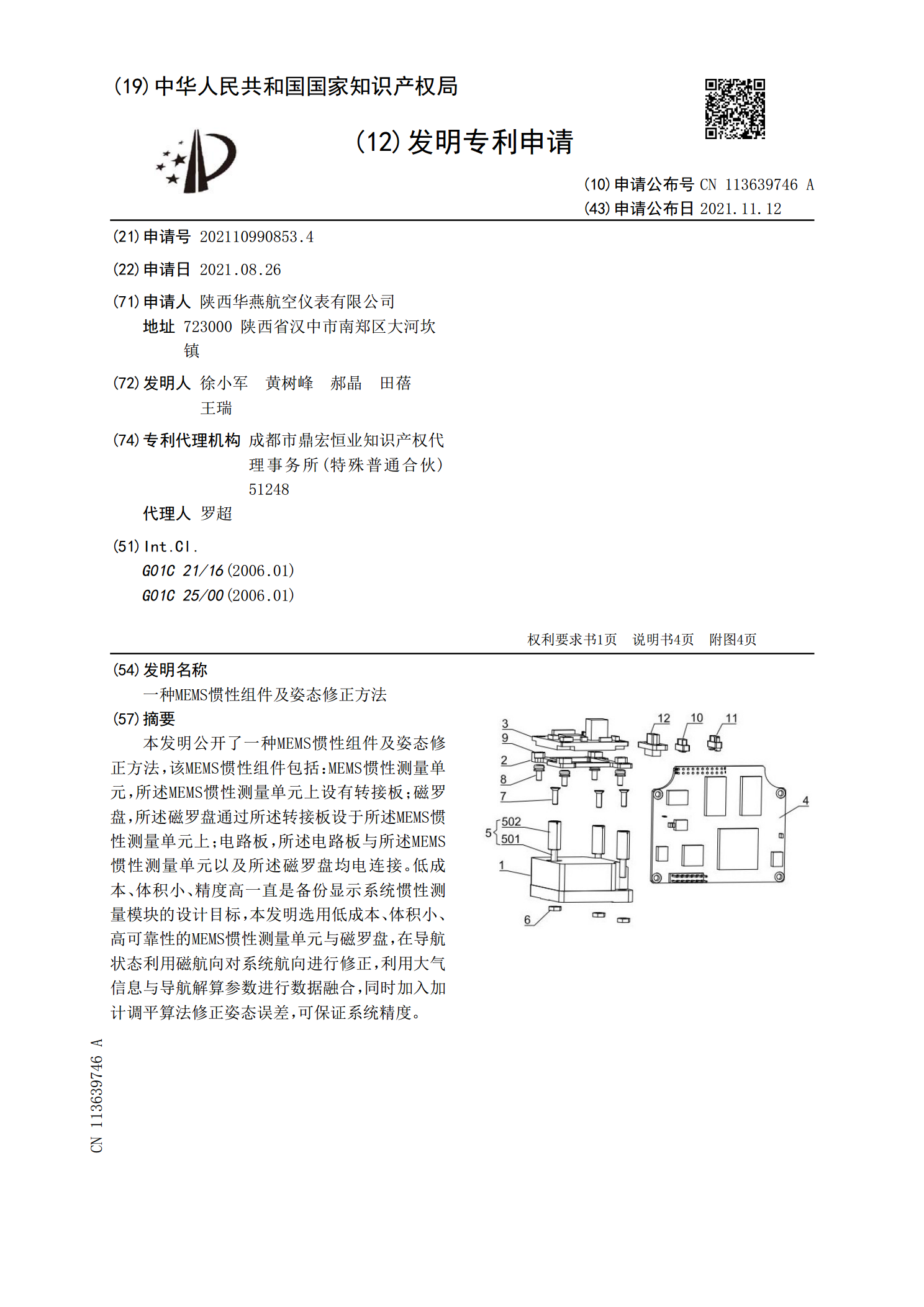
本发明公开了一种MEMS惯性组件及姿态修正方法,该MEMS惯性组件包括:MEMS惯性测量单元,所述MEMS惯性测量单元上设有转接板;磁罗盘,所述磁罗盘通过所述转接板设于所述MEMS惯性测量单元上;电路板,所述电路板与所述MEMS惯性测量单元以及所述磁罗盘均电连接。低成本、体积小、精度高一直是备份显示系统惯性测量模块的设计目标,本发明选用低成本、体积小、高可靠性的MEMS惯性测量单元与磁罗盘,在导航状态利用磁航向对系统航向进行修正,利用大气信息与导航解算参数进行数据融合,同时加入加计调平算法修正姿态误差,可

多个MEMS惯性姿态模块同时标定方法研究.docx
多个MEMS惯性姿态模块同时标定方法研究摘要惯性姿态模块在航空、航天、智能运动和导航等领域广泛应用。对于需要高精度姿态测量的系统,需要进行MEMS惯性姿态模块的标定以保证其测量精度。本文针对多个MEMS惯性姿态模块同时标定方法进行研究,探究了基于互相测量互相标定和基于标定板标定两种方法,并对比了它们的优缺点和适用范围。关键词:MEMS惯性姿态模块、标定、多模块、互相测量互相标定、标定板标定引言惯性姿态模块是一种集成化的传感器系统,用于测量和追踪物体的姿态角速度和方向。惯性姿态模块的应用范围十分广泛,涉及航

一种新型MEMS微惯性姿态系统自动化误差标定方法.docx
一种新型MEMS微惯性姿态系统自动化误差标定方法摘要微电子机械系统惯性姿态系统(MEMS-IAS)被广泛应用于航空、导航、控制等领域。然而,MEMS-IAS本身存在很大的误差,对其进行准确标定和校正是很有必要的。本文介绍了一种新型的MEMS-IAS自动化误差标定方法,该方法采用自动化方式确定误差系数,可以克服传统标定方法存在的人工干预、误差累积等问题。实验结果表明,该方法可以有效地提高MEMS-IAS的精度和稳定性,有助于提高航空、导航、控制等领域的应用效果。关键词:MEMS-IAS;自动化标定;误差系数

基于间接EKF的MEMS惯性系统最优姿态估计.pptx
基于间接EKF的MEMS惯性系统最优姿态估计目录添加章节标题间接扩展卡尔曼滤波器(EKF)EKF的基本原理EKF在姿态估计中的应用EKF的优缺点MEMS惯性系统MEMS惯性系统的组成MEMS惯性传感器的原理MEMS惯性传感器的优缺点最优姿态估计姿态估计的定义和重要性最优姿态估计的方法基于间接EKF的最优姿态估计的实现实验验证与结果分析实验设置与数据采集实验结果展示与分析结果与现有方法的比较结论与展望本文工作总结对未来研究的建议和展望THANKYOU

基于间接EKF的MEMS惯性系统最优姿态估计.docx
基于间接EKF的MEMS惯性系统最优姿态估计基于间接EKF的MEMS惯性系统最优姿态估计摘要:随着科技的不断发展,MEMS(MicroElectro-MechanicalSystem)惯性系统在航空、导航和机器人领域得到了广泛应用。惯性系统的姿态估计是其中一个重要的研究方向。本论文基于间接扩展卡尔曼滤波(EKF)方法,提出了一种优化的姿态估计算法,能够有效地利用MEMS惯性传感器的输出数据,提高姿态估计的精度和稳定性。通过实验验证了该算法的性能,并与其他现有算法进行了比较。1.引言MEMS惯性系统通过利用