
一种新型MEMS微惯性姿态系统自动化误差标定方法.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型MEMS微惯性姿态系统自动化误差标定方法.docx
一种新型MEMS微惯性姿态系统自动化误差标定方法摘要微电子机械系统惯性姿态系统(MEMS-IAS)被广泛应用于航空、导航、控制等领域。然而,MEMS-IAS本身存在很大的误差,对其进行准确标定和校正是很有必要的。本文介绍了一种新型的MEMS-IAS自动化误差标定方法,该方法采用自动化方式确定误差系数,可以克服传统标定方法存在的人工干预、误差累积等问题。实验结果表明,该方法可以有效地提高MEMS-IAS的精度和稳定性,有助于提高航空、导航、控制等领域的应用效果。关键词:MEMS-IAS;自动化标定;误差系数

一种新型微惯性姿态测量系统的系统误差补偿及标定方法.docx
一种新型微惯性姿态测量系统的系统误差补偿及标定方法标题:基于系统误差补偿的新型微惯性姿态测量系统及其标定方法摘要:微惯性姿态测量系统是一种用于测量对象在空间中的方位角、俯仰角和横滚角的装置。然而,由于系统误差的存在,传统的微惯性姿态测量系统容易产生较大量的测量偏差。针对这一问题,本文提出了一种基于系统误差补偿的新型微惯性姿态测量系统及其标定方法。通过对系统误差进行建模和补偿,提高了系统的测量精度和稳定性。1.引言微惯性姿态测量系统是一种重要的姿态测量技术,广泛应用于航空航天、机器人、导航定位等领域。然而,

多个MEMS惯性姿态模块同时标定方法研究.docx
多个MEMS惯性姿态模块同时标定方法研究摘要惯性姿态模块在航空、航天、智能运动和导航等领域广泛应用。对于需要高精度姿态测量的系统,需要进行MEMS惯性姿态模块的标定以保证其测量精度。本文针对多个MEMS惯性姿态模块同时标定方法进行研究,探究了基于互相测量互相标定和基于标定板标定两种方法,并对比了它们的优缺点和适用范围。关键词:MEMS惯性姿态模块、标定、多模块、互相测量互相标定、标定板标定引言惯性姿态模块是一种集成化的传感器系统,用于测量和追踪物体的姿态角速度和方向。惯性姿态模块的应用范围十分广泛,涉及航
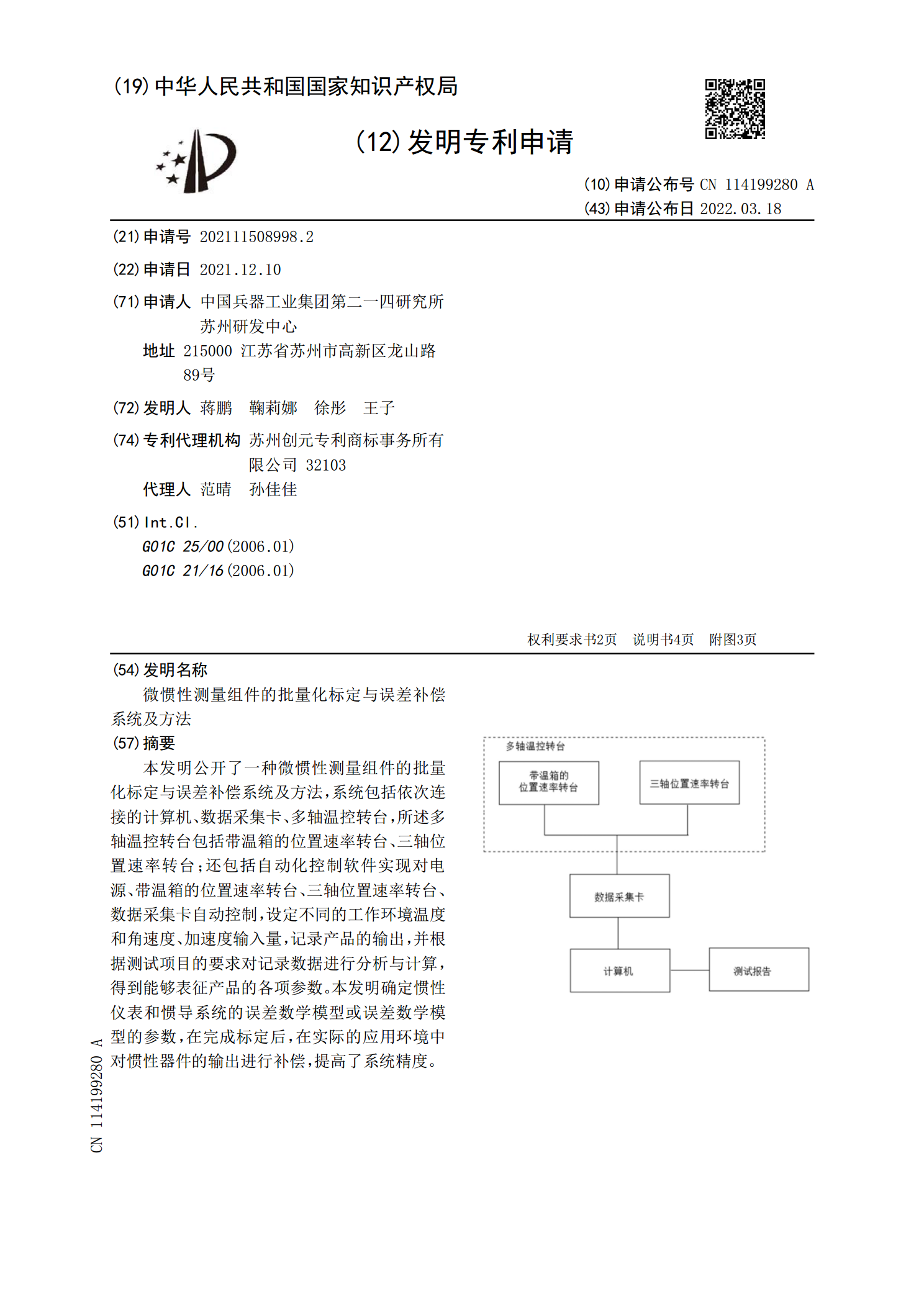
微惯性测量组件的批量化标定与误差补偿系统及方法.pdf
本发明公开了一种微惯性测量组件的批量化标定与误差补偿系统及方法,系统包括依次连接的计算机、数据采集卡、多轴温控转台,所述多轴温控转台包括带温箱的位置速率转台、三轴位置速率转台;还包括自动化控制软件实现对电源、带温箱的位置速率转台、三轴位置速率转台、数据采集卡自动控制,设定不同的工作环境温度和角速度、加速度输入量,记录产品的输出,并根据测试项目的要求对记录数据进行分析与计算,得到能够表征产品的各项参数。本发明确定惯性仪表和惯导系统的误差数学模型或误差数学模型的参数,在完成标定后,在实际的应用环境中对惯性器件
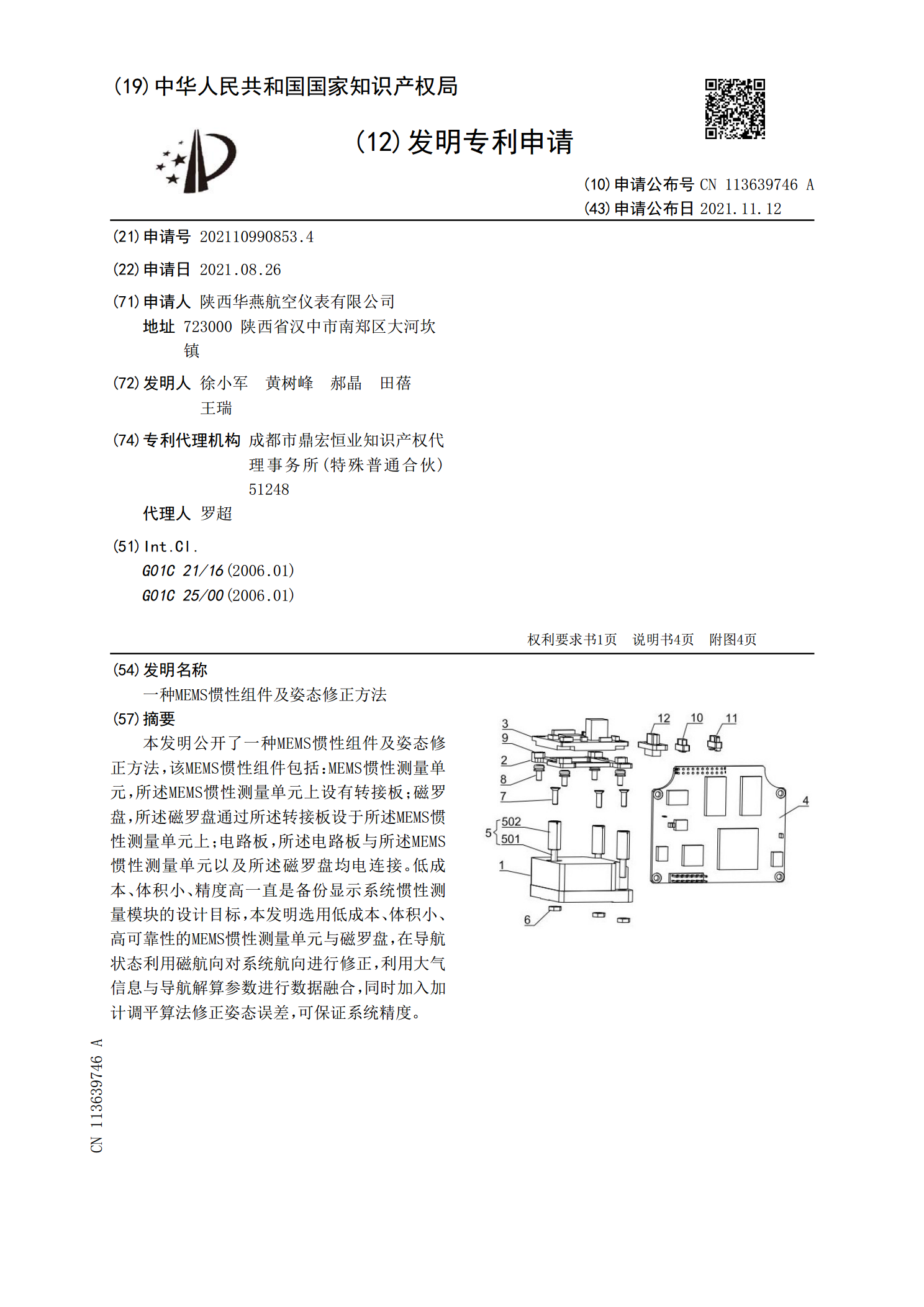
一种MEMS惯性组件及姿态修正方法.pdf
本发明公开了一种MEMS惯性组件及姿态修正方法,该MEMS惯性组件包括:MEMS惯性测量单元,所述MEMS惯性测量单元上设有转接板;磁罗盘,所述磁罗盘通过所述转接板设于所述MEMS惯性测量单元上;电路板,所述电路板与所述MEMS惯性测量单元以及所述磁罗盘均电连接。低成本、体积小、精度高一直是备份显示系统惯性测量模块的设计目标,本发明选用低成本、体积小、高可靠性的MEMS惯性测量单元与磁罗盘,在导航状态利用磁航向对系统航向进行修正,利用大气信息与导航解算参数进行数据融合,同时加入加计调平算法修正姿态误差,可