
一种基于主动视觉定位的服务机器人抓取系统.pdf

长春****主a

1/5
2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于主动视觉定位的服务机器人抓取系统.pdf
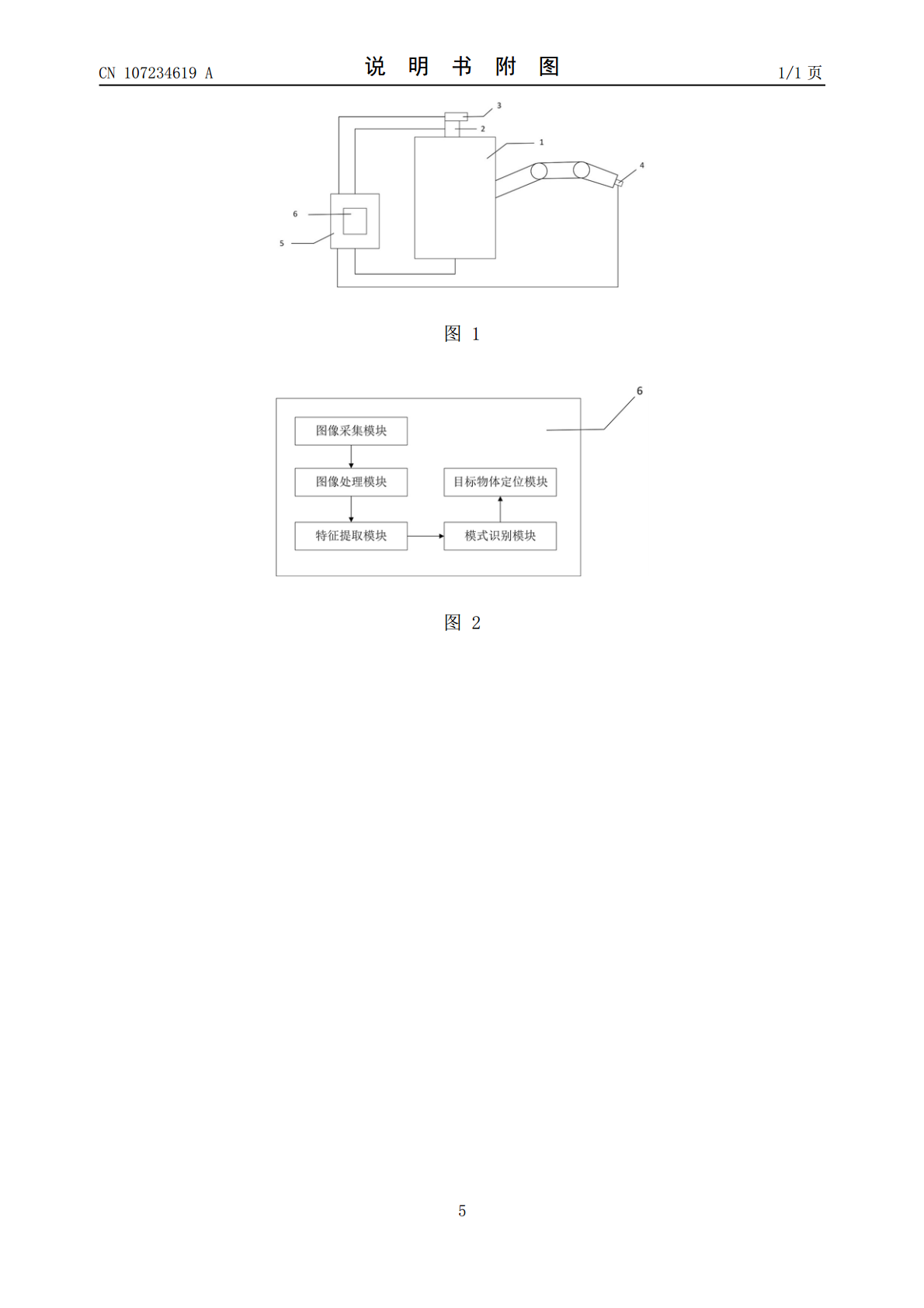
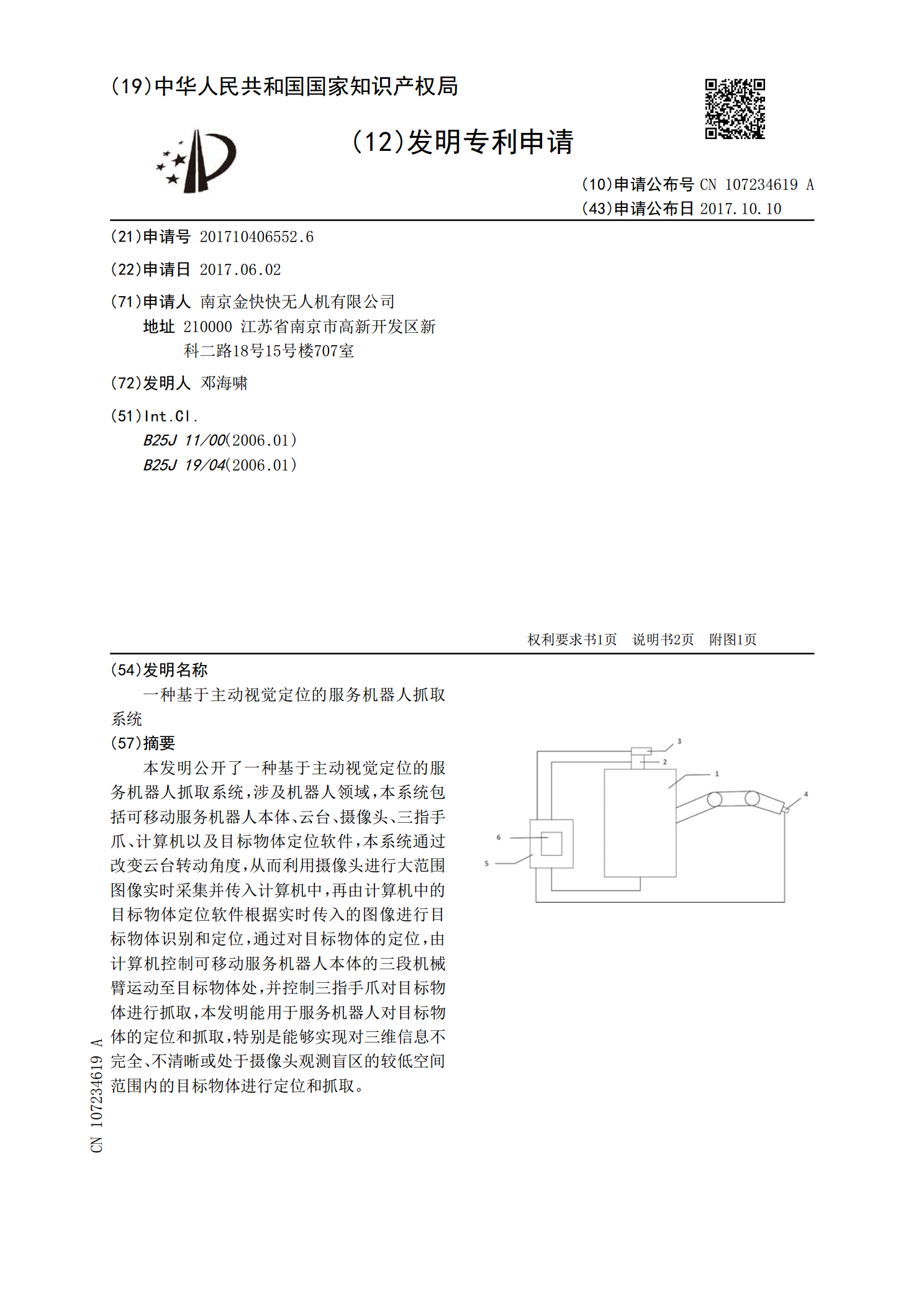
本发明公开了一种基于主动视觉定位的服务机器人抓取系统,涉及机器人领域,本系统包括可移动服务机器人本体、云台、摄像头、三指手爪、计算机以及目标物体定位软件,本系统通过改变云台转动角度,从而利用摄像头进行大范围图像实时采集并传入计算机中,再由计算机中的目标物体定位软件根据实时传入的图像进行目标物体识别和定位,通过对目标物体的定位,由计算机控制可移动服务机器人本体的三段机械臂运动至目标物体处,并控制三指手爪对目标物体进行抓取,本发明能用于服务机器人对目标物体的定位和抓取,特别是能够实现对三维信息不完全、不清晰或
一种基于激光视觉引导的机器人定位抓取方法及系统.pdf
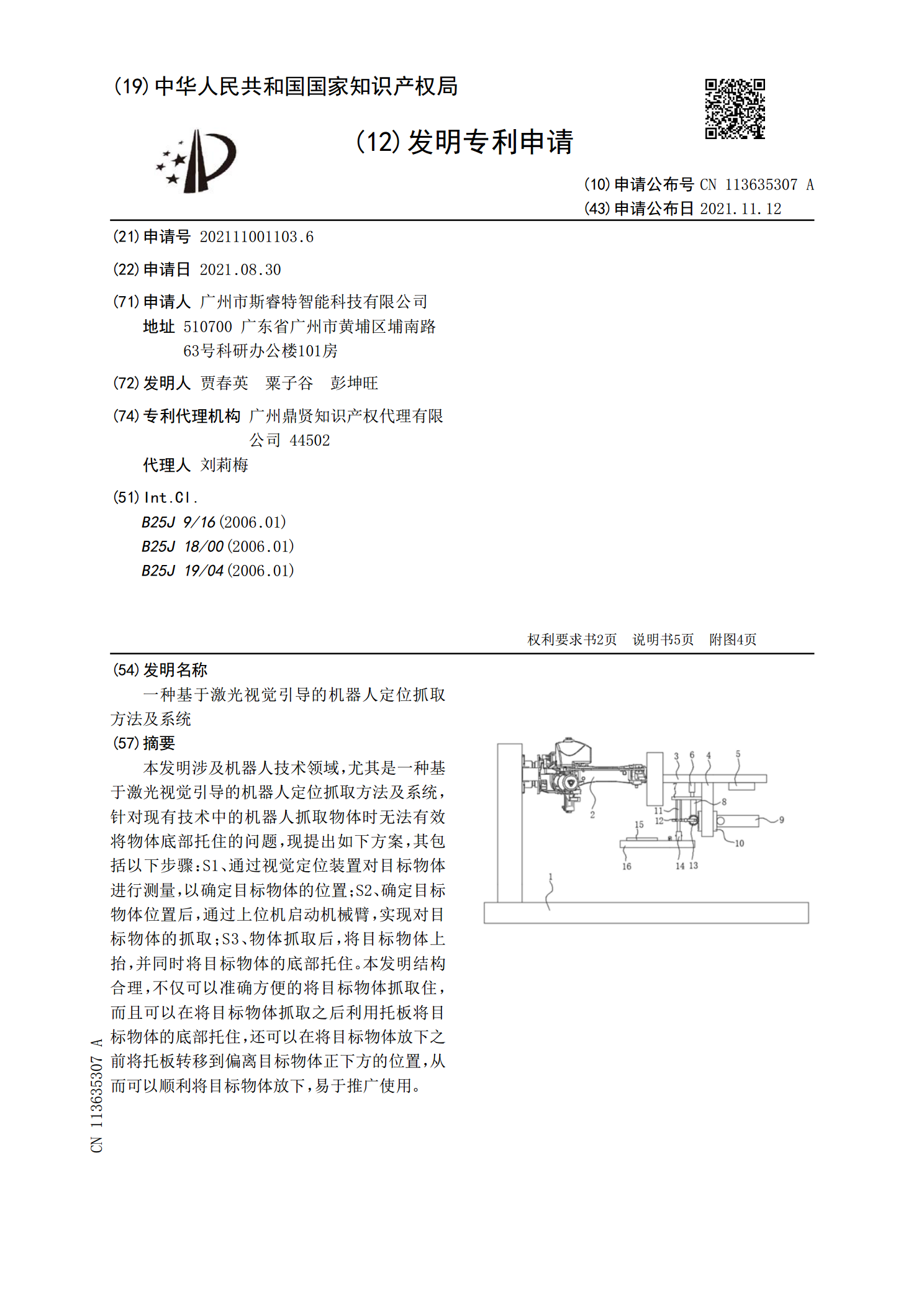
本发明涉及机器人技术领域,尤其是一种基于激光视觉引导的机器人定位抓取方法及系统,针对现有技术中的机器人抓取物体时无法有效将物体底部托住的问题,现提出如下方案,其包括以下步骤:S1、通过视觉定位装置对目标物体进行测量,以确定目标物体的位置;S2、确定目标物体位置后,通过上位机启动机械臂,实现对目标物体的抓取;S3、物体抓取后,将目标物体上抬,并同时将目标物体的底部托住。本发明结构合理,不仅可以准确方便的将目标物体抓取住,而且可以在将目标物体抓取之后利用托板将目标物体的底部托住,还可以在将目标物体放下之前将托
一种基于视觉定位的工业机器人工件抓取实现方法.pdf
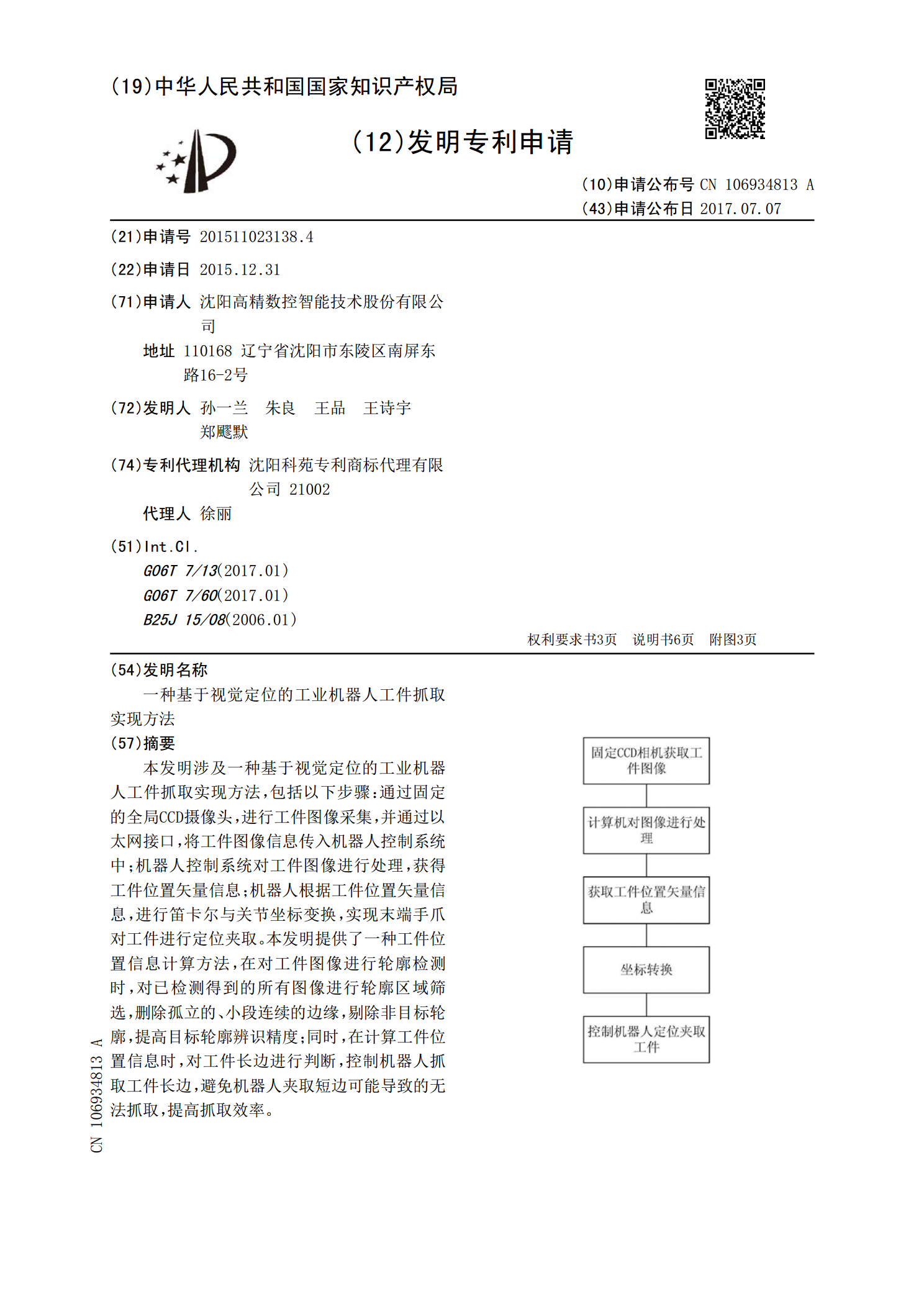
本发明涉及一种基于视觉定位的工业机器人工件抓取实现方法,包括以下步骤:通过固定的全局CCD摄像头,进行工件图像采集,并通过以太网接口,将工件图像信息传入机器人控制系统中;机器人控制系统对工件图像进行处理,获得工件位置矢量信息;机器人根据工件位置矢量信息,进行笛卡尔与关节坐标变换,实现末端手爪对工件进行定位夹取。本发明提供了一种工件位置信息计算方法,在对工件图像进行轮廓检测时,对已检测得到的所有图像进行轮廓区域筛选,删除孤立的、小段连续的边缘,剔除非目标轮廓,提高目标轮廓辨识精度;同时,在计算工件位置信息时
基于视觉识别的二维码定位抓取机器人系统算法.pdf
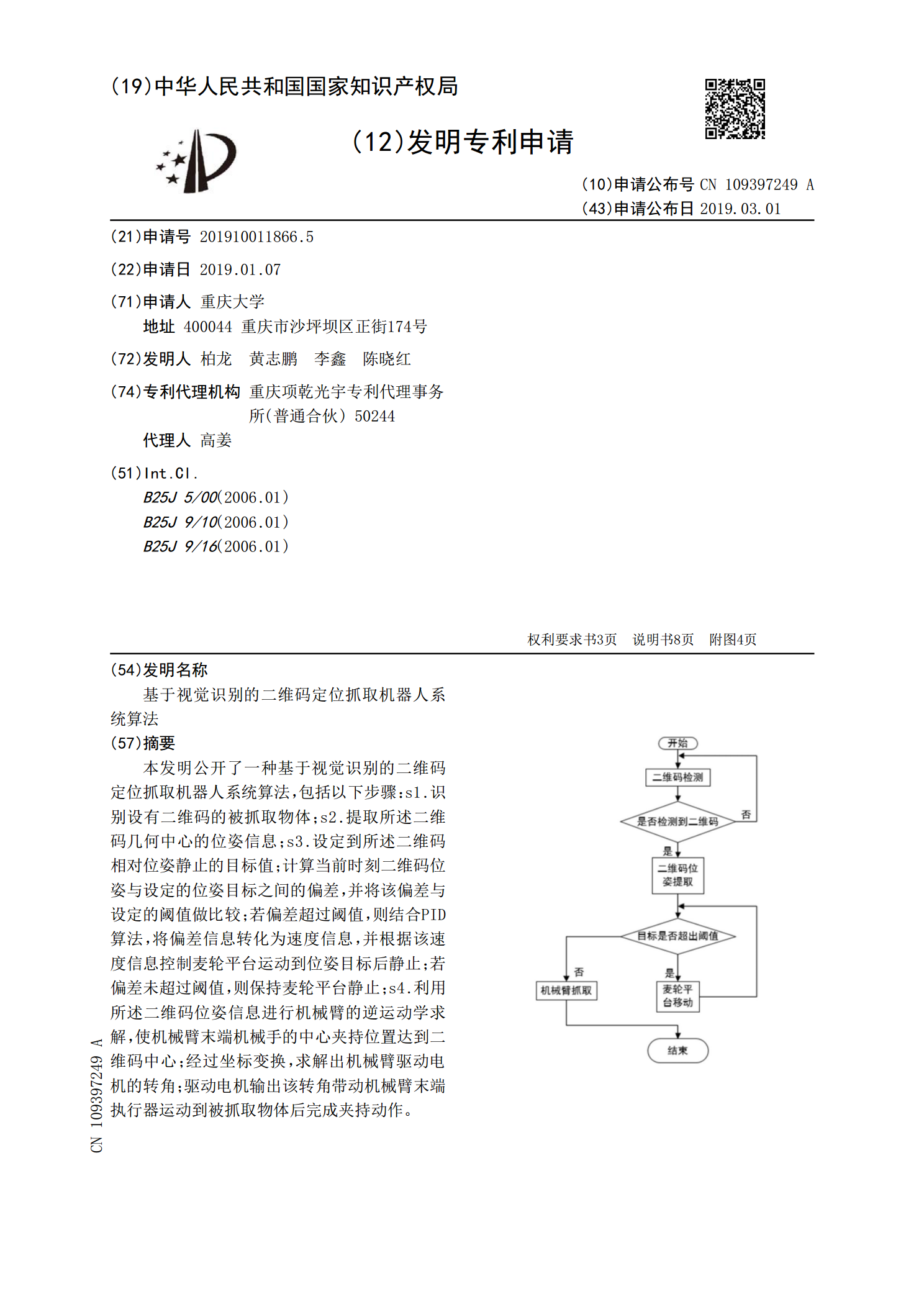
本发明公开了一种基于视觉识别的二维码定位抓取机器人系统算法,包括以下步骤:s1.识别设有二维码的被抓取物体;s2.提取所述二维码几何中心的位姿信息;s3.设定到所述二维码相对位姿静止的目标值;计算当前时刻二维码位姿与设定的位姿目标之间的偏差,并将该偏差与设定的阈值做比较;若偏差超过阈值,则结合PID算法,将偏差信息转化为速度信息,并根据该速度信息控制麦轮平台运动到位姿目标后静止;若偏差未超过阈值,则保持麦轮平台静止;s4.利用所述二维码位姿信息进行机械臂的逆运动学求解,使机械臂末端机械手的中心夹持位置达到
基于视觉的机器人抓取系统应用研究综述.docx
基于视觉的机器人抓取系统应用研究综述一、概述随着机器人技术的迅猛发展,机器人抓取系统作为实现机器人与环境交互的关键环节,受到了广泛关注。视觉作为机器人感知外部环境的主要方式之一,对于提高机器人抓取的准确性和鲁棒性具有重要意义。基于视觉的机器人抓取系统应用研究成为了机器人技术领域的热点之一。基于视觉的机器人抓取系统通过获取目标物体的视觉信息,如位置、姿态、形状等,实现对目标物体的精准定位和抓取。该系统通常包括视觉感知模块、运动规划模块和执行模块等部分,通过各模块之间的协同工作,实现对目标物体的有效抓取。近年