
整车半主动悬架的控制与仿真的任务书.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

整车半主动悬架的控制与仿真的任务书.docx
整车半主动悬架的控制与仿真的任务书任务书设计:一、问题描述整车半主动悬架是一种具有较高控制性能和综合性能的悬架,广泛应用于汽车工业中。本次任务的目的是设计一个整车半主动悬架的控制系统,并进行仿真运算,以验证控制系统的性能。二、任务要求1.根据半主动悬架的构造和原理,设计半主动悬架的控制系统。控制系统应包括:(1)半主动悬架的数学模型(2)控制算法(3)控制器硬件系统的设计。2.设计完整的仿真实验平台。3.设计一种有效的控制器设计方法,并用试验验证其正确性。例如,控制器的设计和实验确定一种最优的控制器参数。

汽车磁流变半主动悬架仿人智能控制研究的任务书.docx
汽车磁流变半主动悬架仿人智能控制研究的任务书任务书任务名称:汽车磁流变半主动悬架仿人智能控制研究研究目的:通过分析汽车磁流变半主动悬架的控制原理和仿人智能控制的理论基础,设计并实现一种能够自适应路面状况和驾驶员行为的智能控制系统,提高汽车行驶的安全性和舒适性。研究内容:1.磁流变半主动悬架的原理、结构和特点分析,并探讨其在改善车辆行驶性能方面的应用;2.仿人智能控制理论的研究与应用,在此基础上设计一种能够自适应路面状况和驾驶员行为的智能控制系统;3.通过模拟和实验对所设计的智能控制系统进行验证和调试,并评
整车半主动悬架系统集成控制方法和系统.pdf
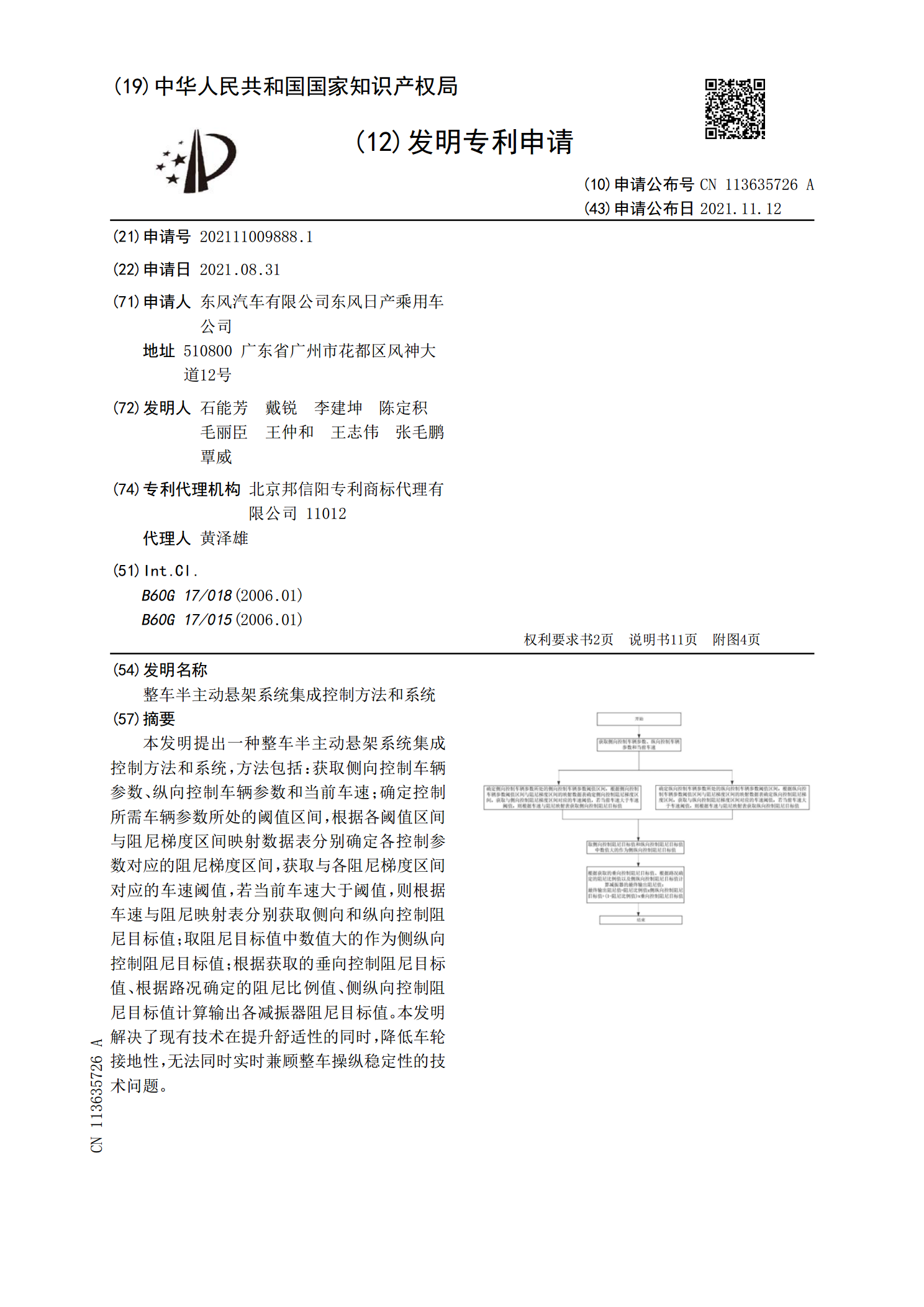
本发明提出一种整车半主动悬架系统集成控制方法和系统,方法包括:获取侧向控制车辆参数、纵向控制车辆参数和当前车速;确定控制所需车辆参数所处的阈值区间,根据各阈值区间与阻尼梯度区间映射数据表分别确定各控制参数对应的阻尼梯度区间,获取与各阻尼梯度区间对应的车速阈值,若当前车速大于阈值,则根据车速与阻尼映射表分别获取侧向和纵向控制阻尼目标值;取阻尼目标值中数值大的作为侧纵向控制阻尼目标值;根据获取的垂向控制阻尼目标值、根据路况确定的阻尼比例值、侧纵向控制阻尼目标值计算输出各减振器阻尼目标值。本发明解决了现有技术在

汽车磁流变半主动悬架控制策略研究与仿真的任务书.docx
汽车磁流变半主动悬架控制策略研究与仿真的任务书任务书一、课题背景汽车磁流变半主动悬架是一种新型的悬架系统,其能够根据路面状况、车速等因素实时调节悬架的刚度和阻尼,提高车辆操控性和乘坐舒适性。目前,汽车磁流变半主动悬架技术已经得到了广泛的应用和研究,但是对于其控制策略的研究还存在一定的不足。因此,本课题旨在对汽车磁流变半主动悬架的控制策略进行研究与仿真,探究其性能和优化方案。二、研究内容1.汽车磁流变半主动悬架的原理与结构。对汽车磁流变半主动悬架的原理和结构进行研究和分析,并确定磁流变液体的基本参数。2.半

基于联合仿真的主动悬架控制策略研究的任务书.docx
基于联合仿真的主动悬架控制策略研究的任务书任务书:一、研究目的车辆主动悬架系统是汽车电子技术领域的一个重要研究方向,其能够通过对底盘调节和车身姿态调节等控制方式,显著提高汽车行驶的舒适性和稳定性。本次研究将主要基于联合仿真技术,探究主动悬架控制策略的实现方式和效果评价标准,为车辆动力学控制方案的优化提供技术支持。二、研究内容1.建立联合仿真模型:针对不同类型的车辆主动悬架控制系统,基于MATLAB/Simulink软件,结合ADAMS多体动力学仿真软件,建立具有高度精度和可重复性的仿真模型,包括悬架系统、