
基于运动栅格的障碍物检测方法、系统和智能终端.pdf

宜欣****外呢


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于运动栅格的障碍物检测方法、系统和智能终端.pdf
本发明公开了一种基于运动栅格的障碍物检测方法、系统和智能终端,方法包括:获取双目相机的视差图,并经过路面删除处理后将视差图数据投影到栅格地图上;生成运动粒子,并基于栅格地图和概率计算得到理论栅格粒子数量;对运动粒子进行重采样修正,基于运动粒子的重采样修正结果,估算各个栅格的位置和速度;基于栅格聚类通过反投影得到障碍物目标。解决了现有技术中障碍物检测准确性较差的技术问题。
一种基于图像分割的障碍物提取方法、系统和智能终端.pdf
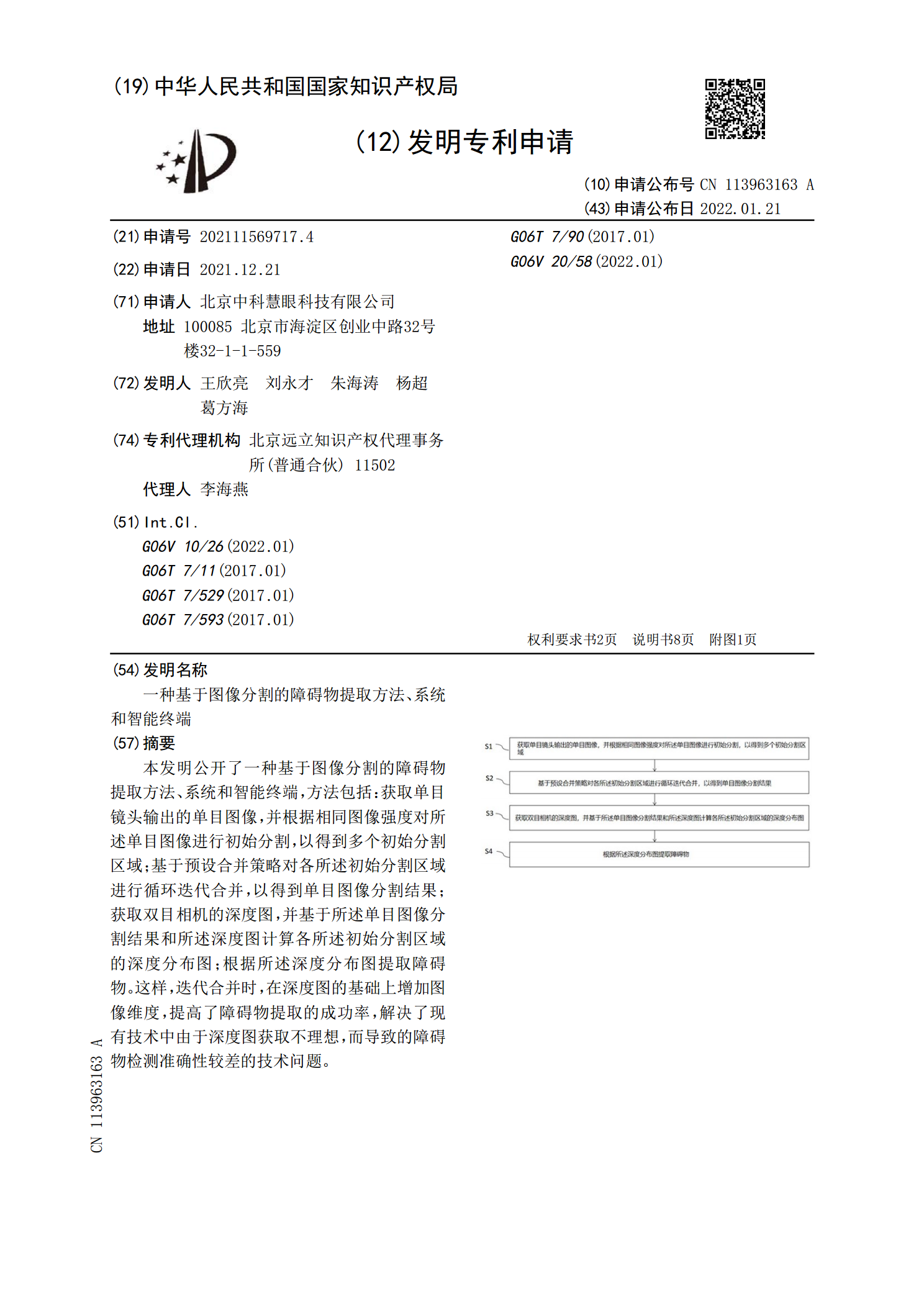
本发明公开了一种基于图像分割的障碍物提取方法、系统和智能终端,方法包括:获取单目镜头输出的单目图像,并根据相同图像强度对所述单目图像进行初始分割,以得到多个初始分割区域;基于预设合并策略对各所述初始分割区域进行循环迭代合并,以得到单目图像分割结果;获取双目相机的深度图,并基于所述单目图像分割结果和所述深度图计算各所述初始分割区域的深度分布图;根据所述深度分布图提取障碍物。这样,迭代合并时,在深度图的基础上增加图像维度,提高了障碍物提取的成功率,解决了现有技术中由于深度图获取不理想,而导致的障碍物检测准确性

智能终端的硬件故障检测方法、检测系统及智能终端.pdf
本发明提出一种智能终端的硬件模块故障检测方法、检测系统及智能终端,所述方法包括:判断所述智能终端的多个预设硬件模块中是否存在发生故障的硬件模块;当判断出所述多个预设硬件模块中存在发生故障的硬件模块,轮流切断所述多个预设硬件模块中的每一个第一类硬件模块的供电;在待机状态下,分别获取切断每一个所述第一类硬件模块的供电后所述智能终端的电网络中的当前电流值;获取待机状态下所述智能终端的电网络中的理论电流值,并判断每一个所述当前电流值与所述理论电流值的差值是否小于对应的第一预设差值;当其中一个所述当前电流值与所述理

基于稠密视差图的路面不平度检测方法、系统和智能终端.pdf
本发明公开了一种基于稠密视差图的路面不平度检测方法、系统和智能终端,所述方法包括:获取同一道路场景的左右视图,并对所述左右视图进行处理,得到所述道路场景的稠密视差图;基于所述稠密视差图,将目标区域的图像信息转换为世界坐标系下的三维点云信息;将所述目标区域划分为多个m行n列的投影栅格区域,并基于每个所述投影栅格区域中的三维点云信息数据分别拟合直线模型;基于所述拟合直线模型分别统计n列的带权重残差和;根据所述带权重残差和与预设阈值的关系,判定并输出当前路面平整度等级。该方案能够及时获取当前路面平整度等级,从而
基于双目视觉系统的帧间匹配检测方法、系统和智能终端.pdf
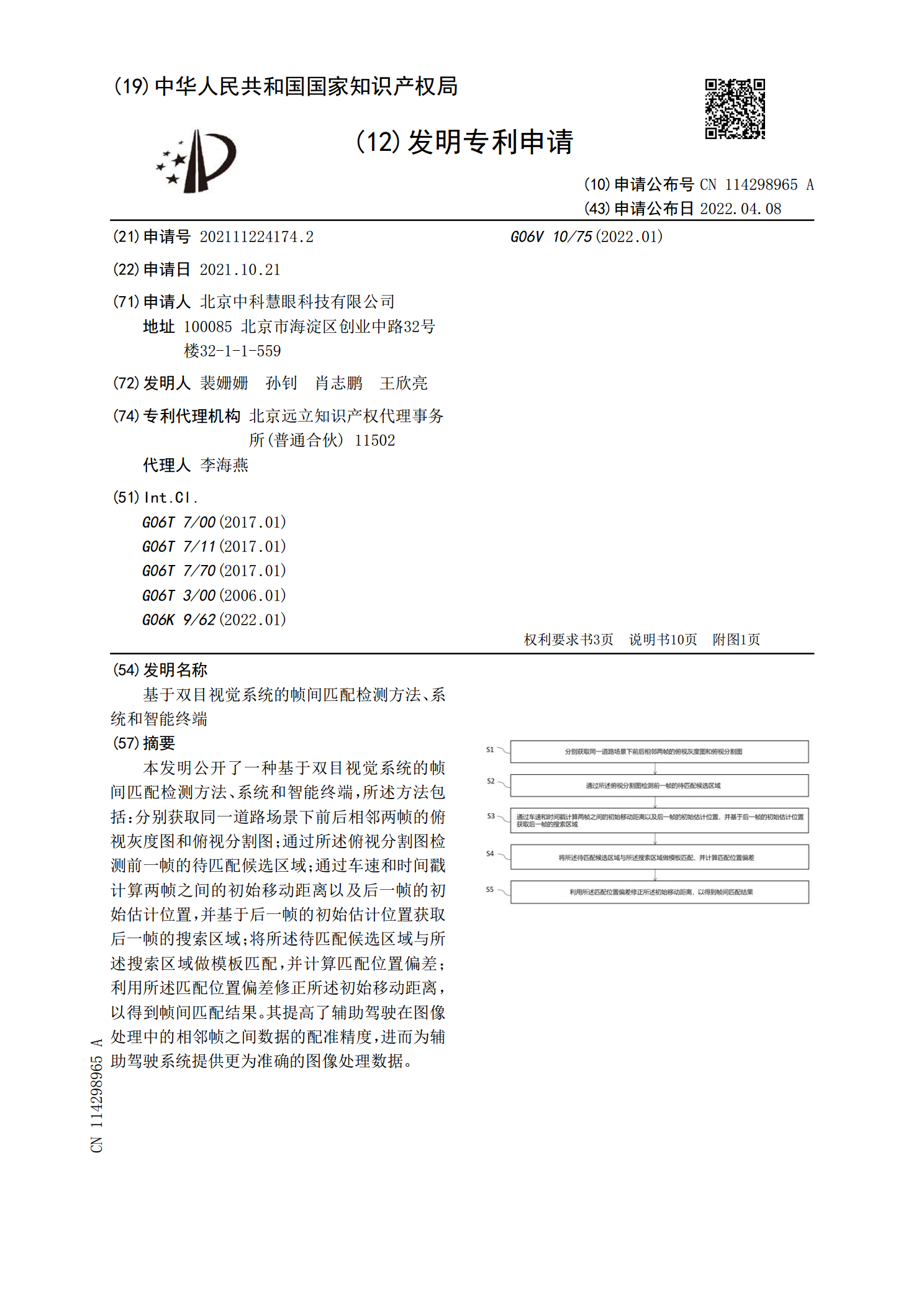
本发明公开了一种基于双目视觉系统的帧间匹配检测方法、系统和智能终端,所述方法包括:分别获取同一道路场景下前后相邻两帧的俯视灰度图和俯视分割图;通过所述俯视分割图检测前一帧的待匹配候选区域;通过车速和时间戳计算两帧之间的初始移动距离以及后一帧的初始估计位置,并基于后一帧的初始估计位置获取后一帧的搜索区域;将所述待匹配候选区域与所述搜索区域做模板匹配,并计算匹配位置偏差;利用所述匹配位置偏差修正所述初始移动距离,以得到帧间匹配结果。其提高了辅助驾驶在图像处理中的相邻帧之间数据的配准精度,进而为辅助驾驶系统提供