
基于稠密视差图的路面不平度检测方法、系统和智能终端.pdf

代瑶****zy

1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于稠密视差图的路面不平度检测方法、系统和智能终端.pdf
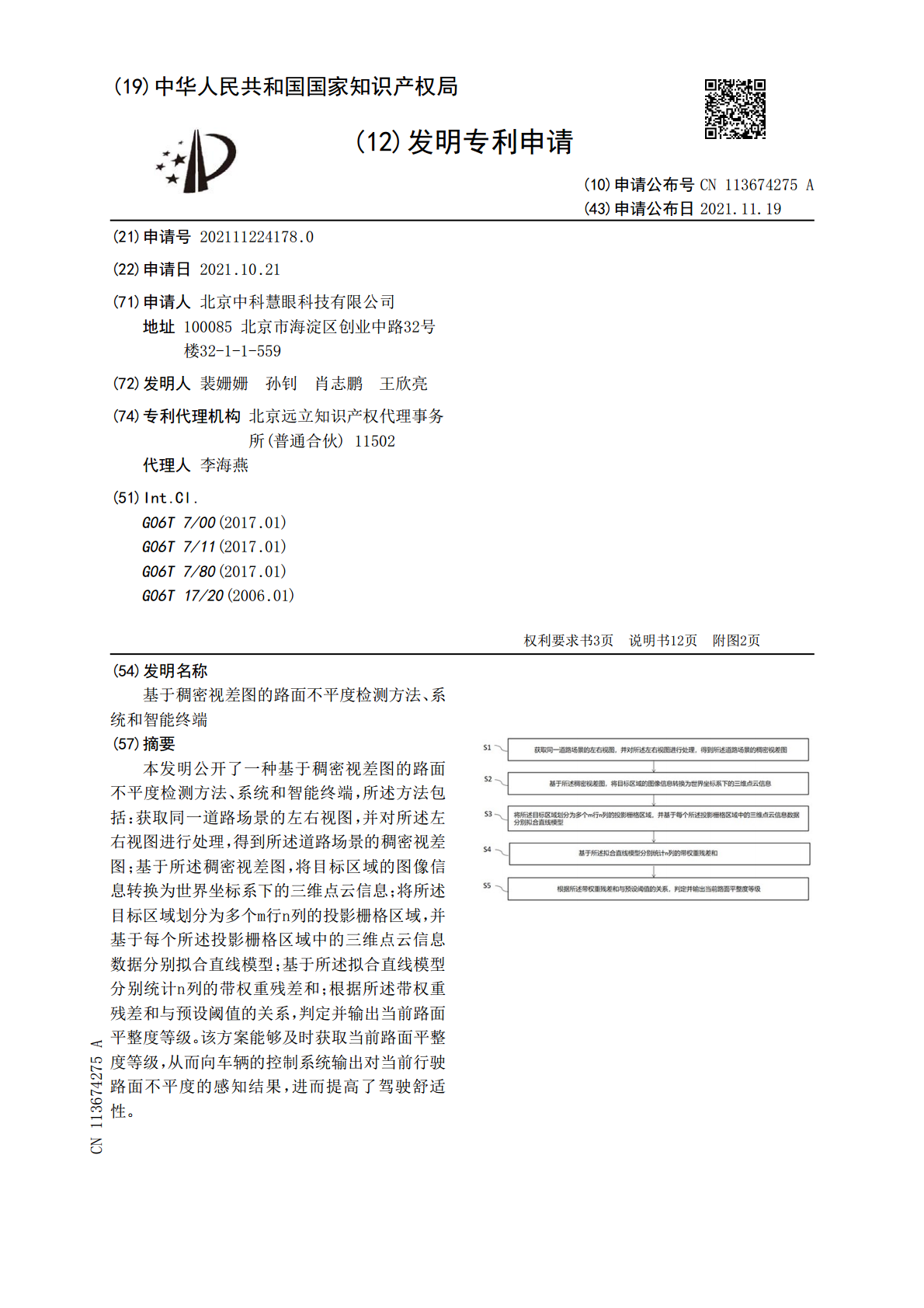
本发明公开了一种基于稠密视差图的路面不平度检测方法、系统和智能终端,所述方法包括:获取同一道路场景的左右视图,并对所述左右视图进行处理,得到所述道路场景的稠密视差图;基于所述稠密视差图,将目标区域的图像信息转换为世界坐标系下的三维点云信息;将所述目标区域划分为多个m行n列的投影栅格区域,并基于每个所述投影栅格区域中的三维点云信息数据分别拟合直线模型;基于所述拟合直线模型分别统计n列的带权重残差和;根据所述带权重残差和与预设阈值的关系,判定并输出当前路面平整度等级。该方案能够及时获取当前路面平整度等级,从而
基于多传感融合的稠密视差图提取方法、系统和智能终端.pdf
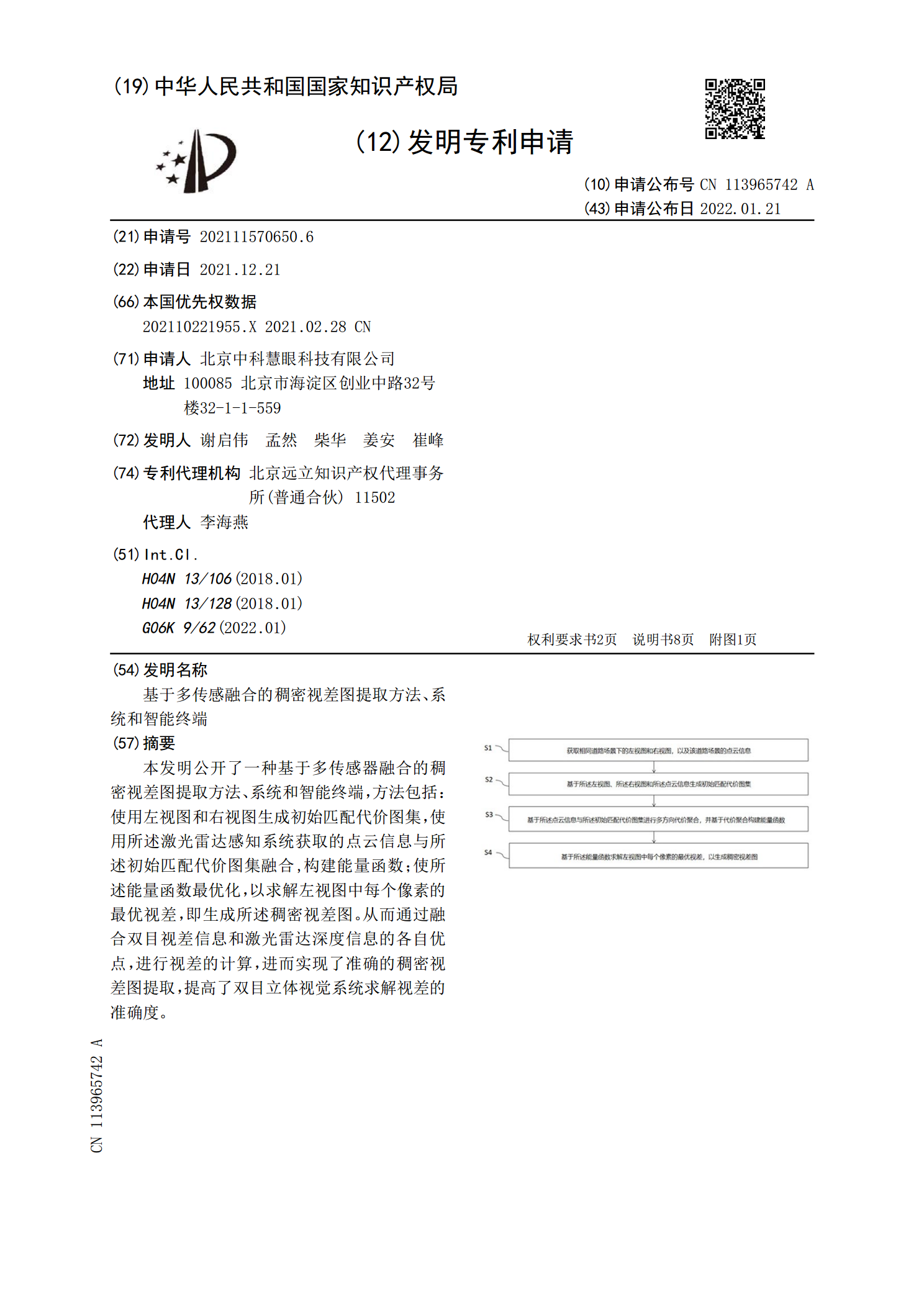
本发明公开了一种基于多传感器融合的稠密视差图提取方法、系统和智能终端,方法包括:使用左视图和右视图生成初始匹配代价图集,使用所述激光雷达感知系统获取的点云信息与所述初始匹配代价图集融合,构建能量函数;使所述能量函数最优化,以求解左视图中每个像素的最优视差,即生成所述稠密视差图。从而通过融合双目视差信息和激光雷达深度信息的各自优点,进行视差的计算,进而实现了准确的稠密视差图提取,提高了双目立体视觉系统求解视差的准确度。

基于改进卷积神经网络的稠密视差图提取方法.docx
基于改进卷积神经网络的稠密视差图提取方法基于改进卷积神经网络的稠密视差图提取方法摘要:在计算机视觉领域中,视差图是一种重要的视觉信息,被广泛应用于深度估计、场景重建等任务中。然而,传统的视差图提取方法存在一些问题,如对纹理丰富区域和重复纹理区域的处理不准确等。为了解决这些问题,本文提出了一种基于改进卷积神经网络的稠密视差图提取方法。通过引入空间注意力机制和多尺度特征融合模块,提高了视差图提取的准确性和鲁棒性。实验结果表明,所提出的方法在不同场景和数据集上均取得了较好的性能。关键词:视差图;卷积神经网络;空

基于偏微分方程的稠密视差图获取方法.docx
基于偏微分方程的稠密视差图获取方法传统的视差图建立方法主要是基于双目立体摄像原理,即通过两个视点同时采集物体图像,然后计算两个视点之间的像素偏移量,从而获得视差图。这种方法需要采集两张图像,对于运动物体或者存在移动的相机,需要进行图像的纠偏处理,因而效率较低。为了解决这一问题,基于偏微分方程的稠密视差图获取方法被提出。偏微分方程是一类常见的数学方法,可以对图像进行处理和分析。这种方法通过对图像中的像素进行偏微分运算,从而计算出该像素的视差值,进而构建稠密的视差图。下面将分别介绍基于偏微分方程的视差图获取方

基于双目立体视觉的路面拟合方法、系统和智能终端.pdf
本发明公开了一种基于双目立体视觉的路面拟合方法、系统和智能终端,所述方法包括:获取同一道路场景的连续多帧左右视图,以及对应的视差图;基于相邻的前后两帧图像进行特征点提取,基于各所述特征点建立旋转平移矩阵,并通过所述旋转平移矩阵预测粒子运动状态;对所述视差图进行栅格投影,并计算所述栅格投影范围内的占用率和空置率,以得到后验概率;根据所述后验概率修正预测得到的粒子运动状态,并基于修正后的粒子运动状态拟合路面模型。其能够通过有效的高度滤波,获取较为精准的路面方程,从而提高路面拟合的准确性。