
一种车载环视系统中的亮度均衡方法及系统.pdf

代瑶****zy

1/10
2/10
3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车载环视系统中的亮度均衡方法及系统.pdf
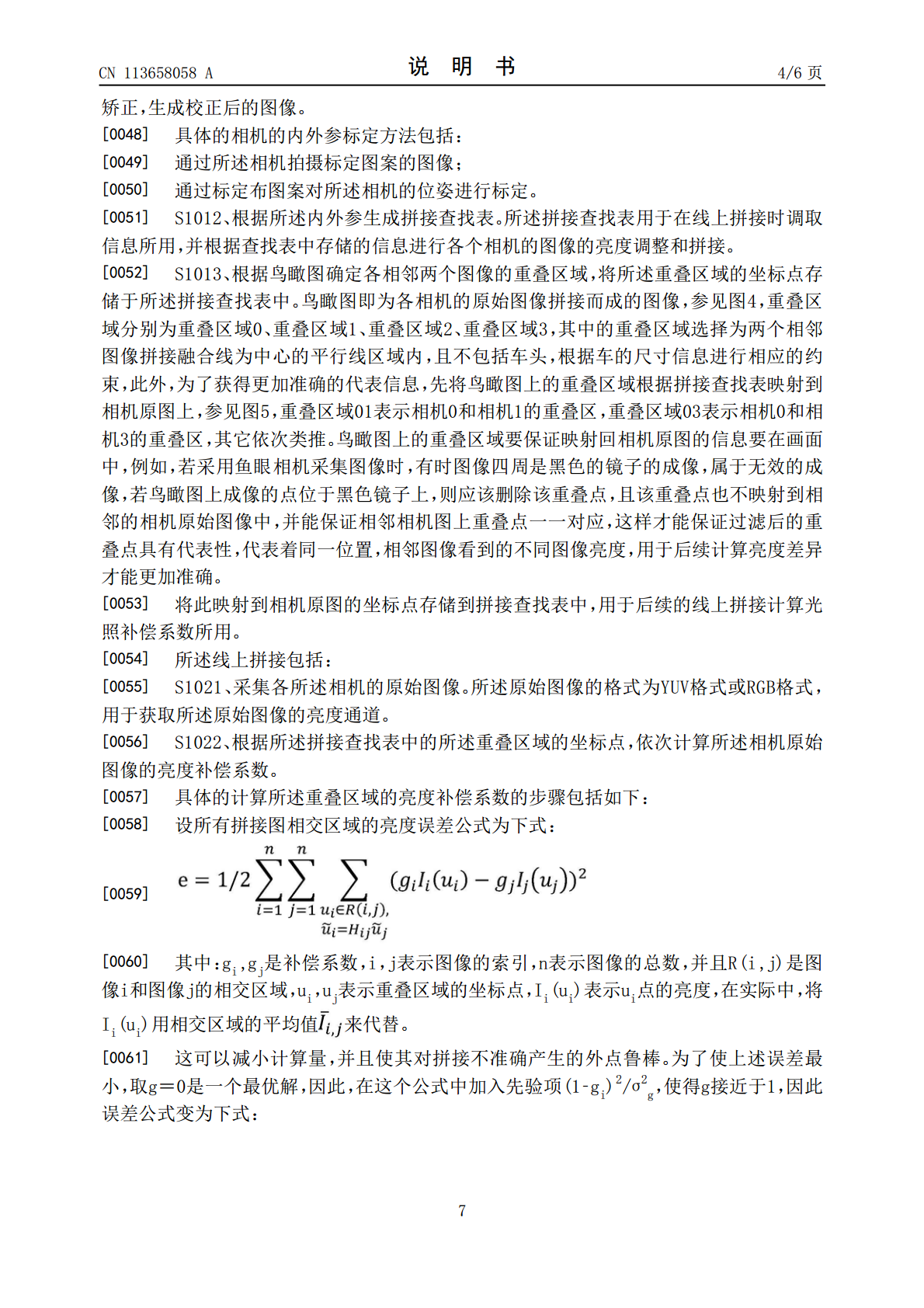
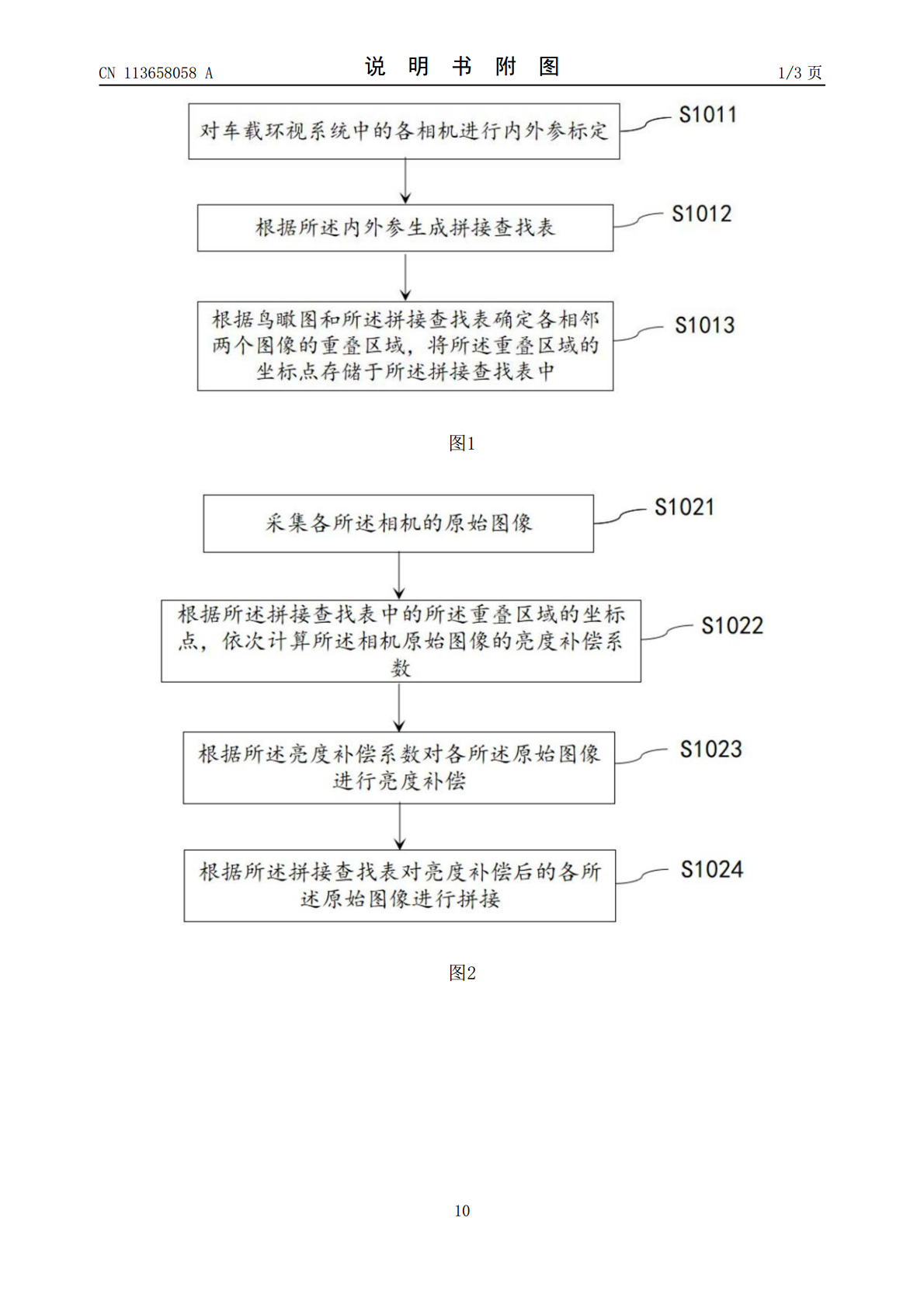
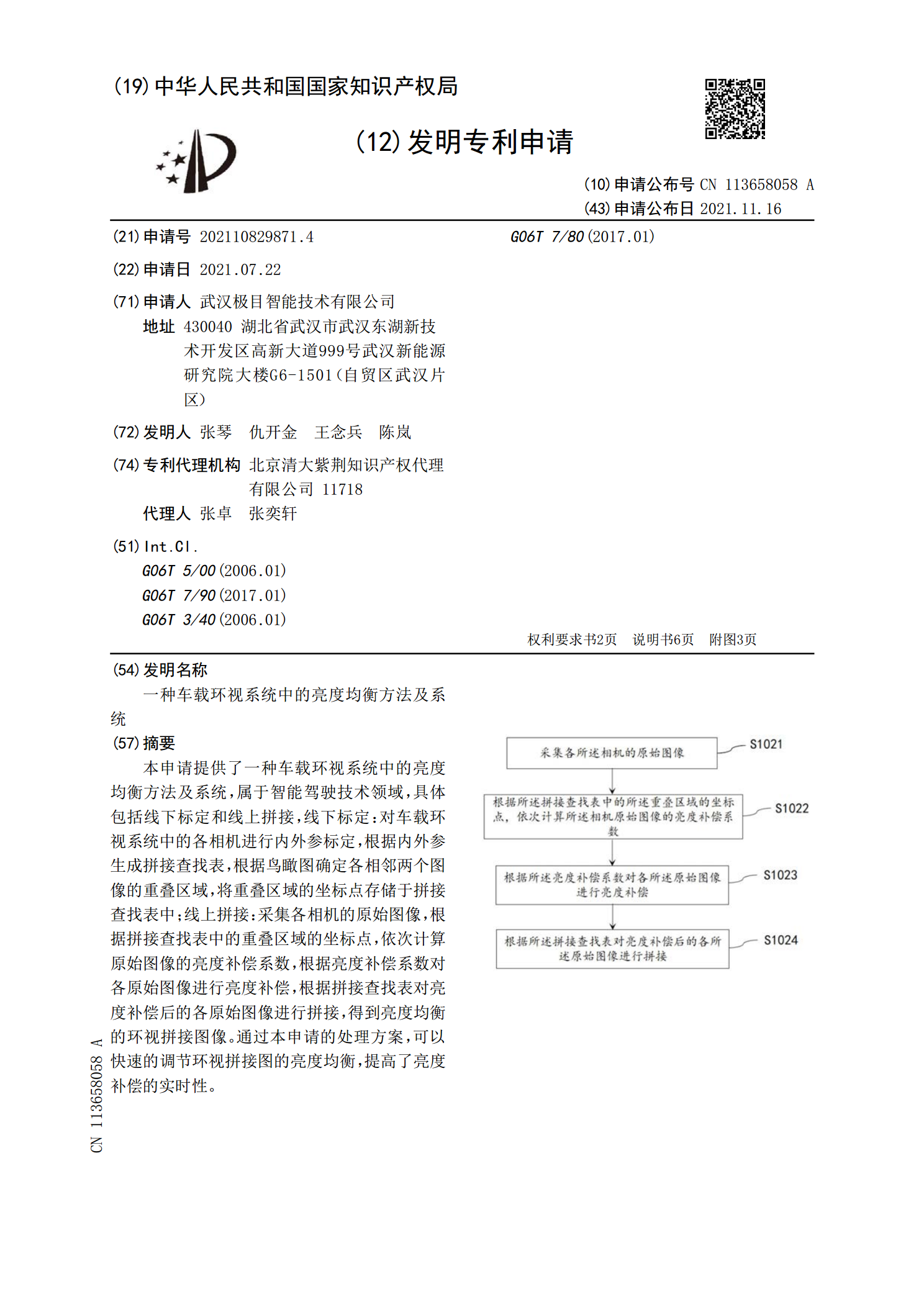
本申请提供了一种车载环视系统中的亮度均衡方法及系统,属于智能驾驶技术领域,具体包括线下标定和线上拼接,线下标定:对车载环视系统中的各相机进行内外参标定,根据内外参生成拼接查找表,根据鸟瞰图确定各相邻两个图像的重叠区域,将重叠区域的坐标点存储于拼接查找表中;线上拼接:采集各相机的原始图像,根据拼接查找表中的重叠区域的坐标点,依次计算原始图像的亮度补偿系数,根据亮度补偿系数对各原始图像进行亮度补偿,根据拼接查找表对亮度补偿后的各原始图像进行拼接,得到亮度均衡的环视拼接图像。通过本申请的处理方案,可以快速的调节
一种车载环视系统的环视图拼接方法.pdf
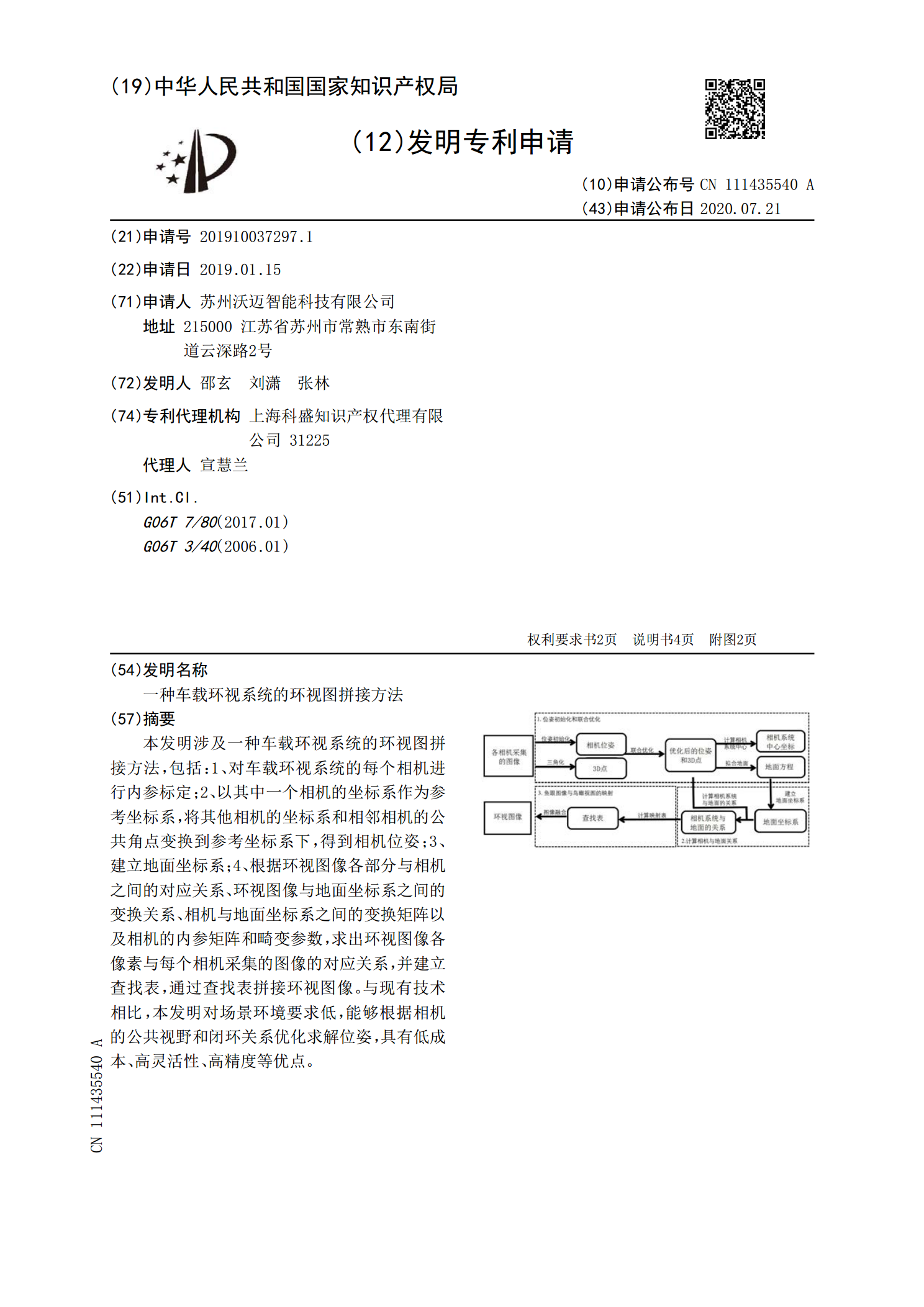
本发明涉及一种车载环视系统的环视图拼接方法,包括:1、对车载环视系统的每个相机进行内参标定;2、以其中一个相机的坐标系作为参考坐标系,将其他相机的坐标系和相邻相机的公共角点变换到参考坐标系下,得到相机位姿;3、建立地面坐标系;4、根据环视图像各部分与相机之间的对应关系、环视图像与地面坐标系之间的变换关系、相机与地面坐标系之间的变换矩阵以及相机的内参矩阵和畸变参数,求出环视图像各像素与每个相机采集的图像的对应关系,并建立查找表,通过查找表拼接环视图像。与现有技术相比,本发明对场景环境要求低,能够根据相机的公
一种立体车载环视方法、系统及车载中控装置.pdf
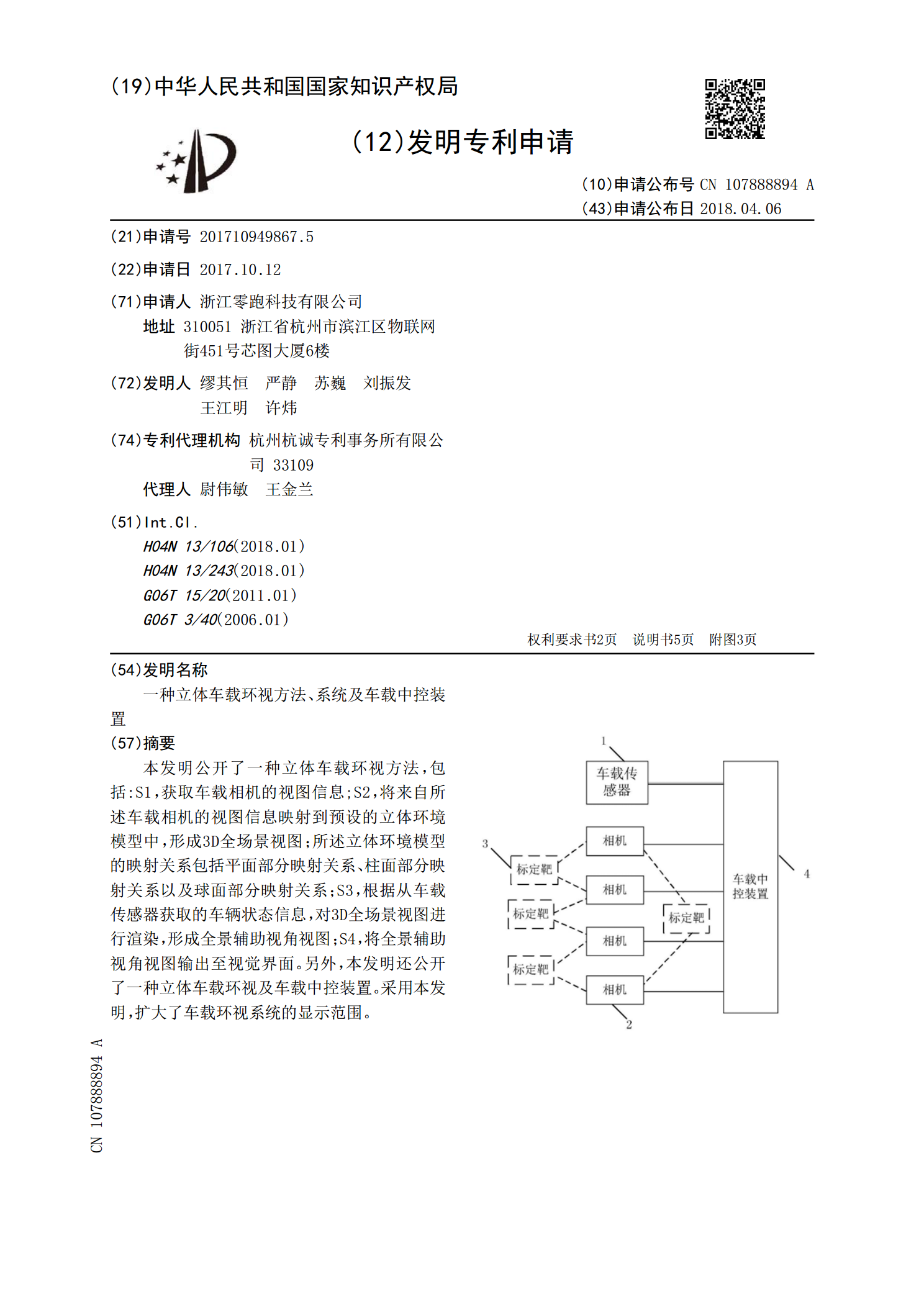
本发明公开了一种立体车载环视方法,包括:S1,获取车载相机的视图信息;S2,将来自所述车载相机的视图信息映射到预设的立体环境模型中,形成3D全场景视图;所述立体环境模型的映射关系包括平面部分映射关系、柱面部分映射关系以及球面部分映射关系;S3,根据从车载传感器获取的车辆状态信息,对3D全场景视图进行渲染,形成全景辅助视角视图;S4,将全景辅助视角视图输出至视觉界面。另外,本发明还公开了一种立体车载环视及车载中控装置。采用本发明,扩大了车载环视系统的显示范围。
一种车载环视显示方法及其系统.pdf
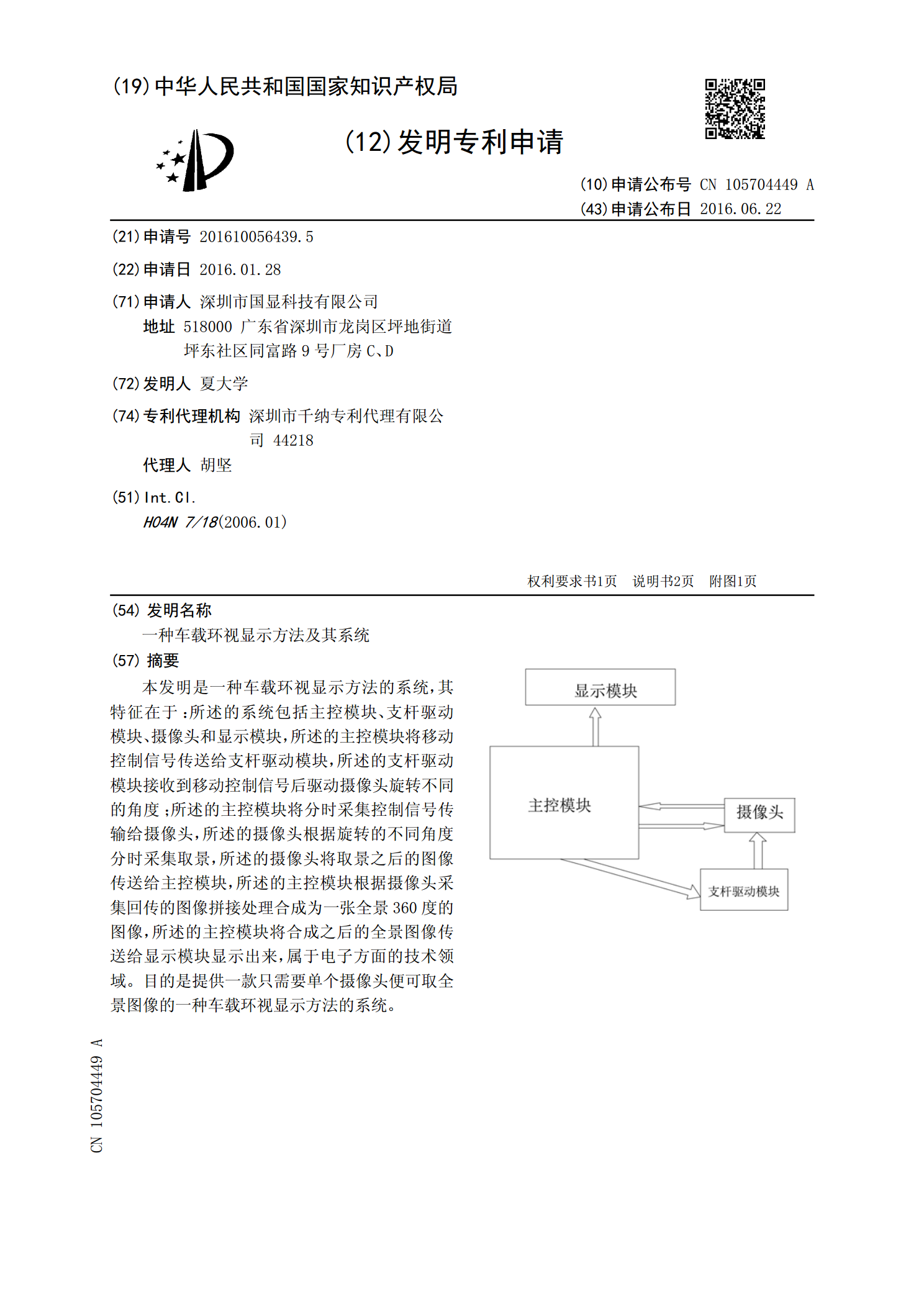
本发明是一种车载环视显示方法的系统,其特征在于:所述的系统包括主控模块、支杆驱动模块、摄像头和显示模块,所述的主控模块将移动控制信号传送给支杆驱动模块,所述的支杆驱动模块接收到移动控制信号后驱动摄像头旋转不同的角度;所述的主控模块将分时采集控制信号传输给摄像头,所述的摄像头根据旋转的不同角度分时采集取景,所述的摄像头将取景之后的图像传送给主控模块,所述的主控模块根据摄像头采集回传的图像拼接处理合成为一张全景360度的图像,所述的主控模块将合成之后的全景图像传送给显示模块显示出来,属于电子方面的技术领域。目
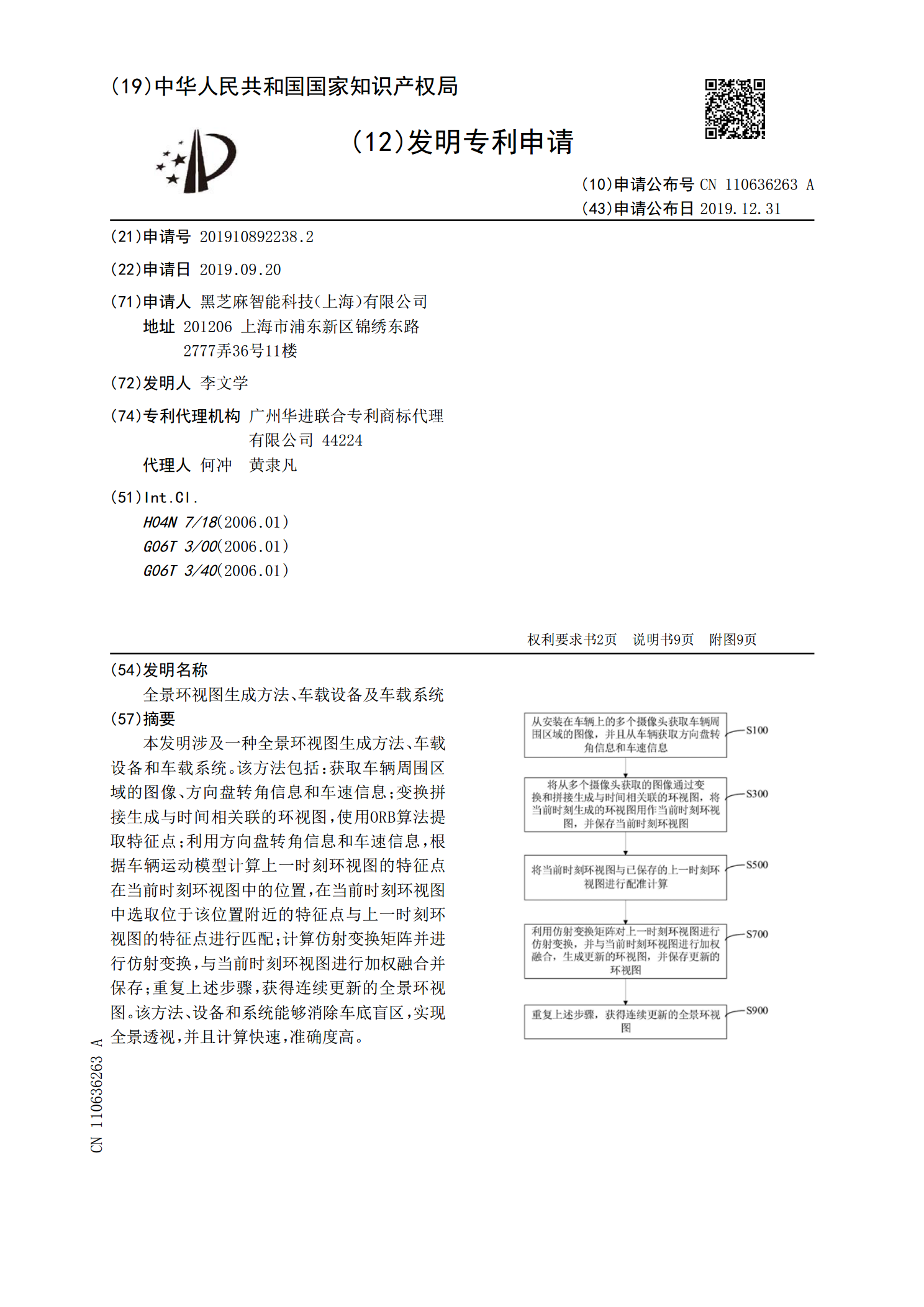
全景环视图生成方法、车载设备及车载系统.pdf
本发明涉及一种全景环视图生成方法、车载设备和车载系统。该方法包括:获取车辆周围区域的图像、方向盘转角信息和车速信息;变换拼接生成与时间相关联的环视图,使用ORB算法提取特征点;利用方向盘转角信息和车速信息,根据车辆运动模型计算上一时刻环视图的特征点在当前时刻环视图中的位置,在当前时刻环视图中选取位于该位置附近的特征点与上一时刻环视图的特征点进行匹配;计算仿射变换矩阵并进行仿射变换,与当前时刻环视图进行加权融合并保存;重复上述步骤,获得连续更新的全景环视图。该方法、设备和系统能够消除车底盲区,实现全景透视,