
一种多目标车辆跟踪方法.pdf

白真****ng


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种多目标车辆跟踪方法.pdf
本发明提供了一种多目标车辆跟踪方法,首先输入实际拍摄的车辆视频,检测模块使用RFB‑Net网络,使用VOC2007数据集中的车辆数据训练,将检测器输出作为跟踪模型输入;然后获取目标检测框,进行表观特征或运动特征的提取;接着进行相似度计算,根据前后两帧目标之间的匹配程度进行数据关联,为每个对象分配目标的ID;本发明可以较好地解决车辆移动速度快、目标相似度高以及目标相互遮挡导致跟踪失败的问题。
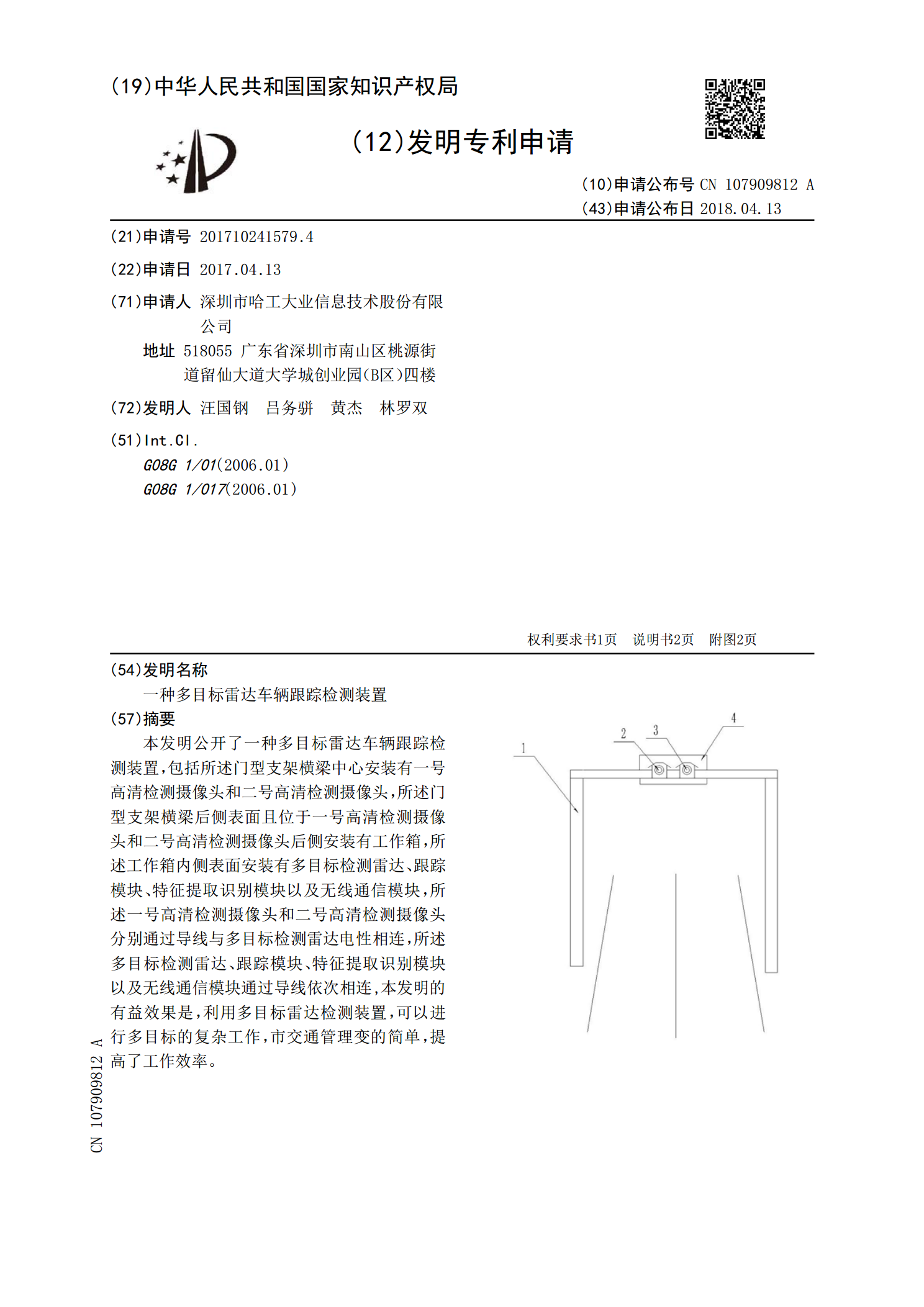
一种多目标雷达车辆跟踪检测装置.pdf
本发明公开了一种多目标雷达车辆跟踪检测装置,包括所述门型支架横梁中心安装有一号高清检测摄像头和二号高清检测摄像头,所述门型支架横梁后侧表面且位于一号高清检测摄像头和二号高清检测摄像头后侧安装有工作箱,所述工作箱内侧表面安装有多目标检测雷达、跟踪模块、特征提取识别模块以及无线通信模块,所述一号高清检测摄像头和二号高清检测摄像头分别通过导线与多目标检测雷达电性相连,所述多目标检测雷达、跟踪模块、特征提取识别模块以及无线通信模块通过导线依次相连,本发明的有益效果是,利用多目标雷达检测装置,可以进行多目标的复杂工
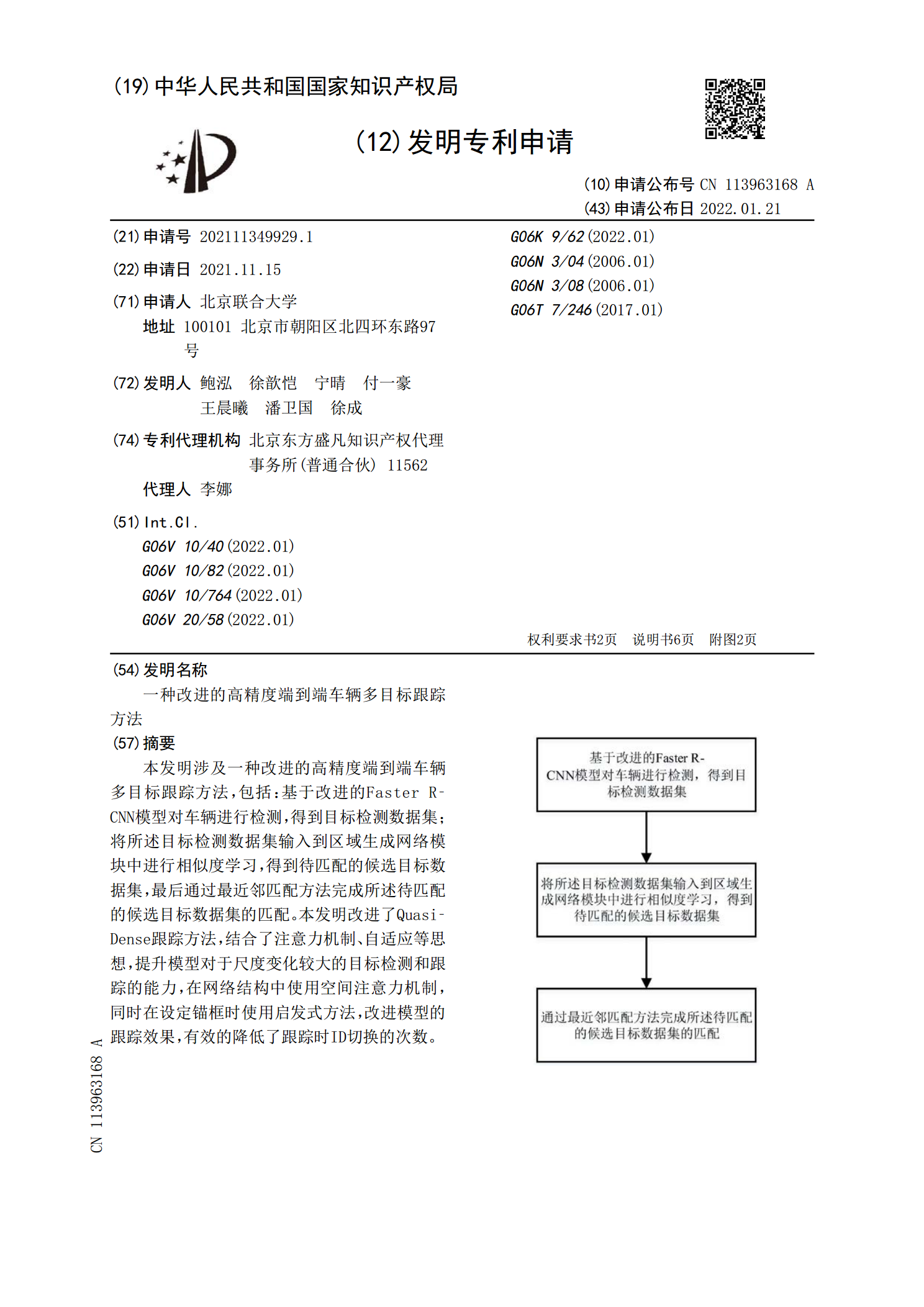
一种改进的高精度端到端车辆多目标跟踪方法.pdf
本发明涉及一种改进的高精度端到端车辆多目标跟踪方法,包括:基于改进的FasterR‑CNN模型对车辆进行检测,得到目标检测数据集;将所述目标检测数据集输入到区域生成网络模块中进行相似度学习,得到待匹配的候选目标数据集,最后通过最近邻匹配方法完成所述待匹配的候选目标数据集的匹配。本发明改进了Quasi‑Dense跟踪方法,结合了注意力机制、自适应等思想,提升模型对于尺度变化较大的目标检测和跟踪的能力,在网络结构中使用空间注意力机制,同时在设定锚框时使用启发式方法,改进模型的跟踪效果,有效的降低了跟踪时ID
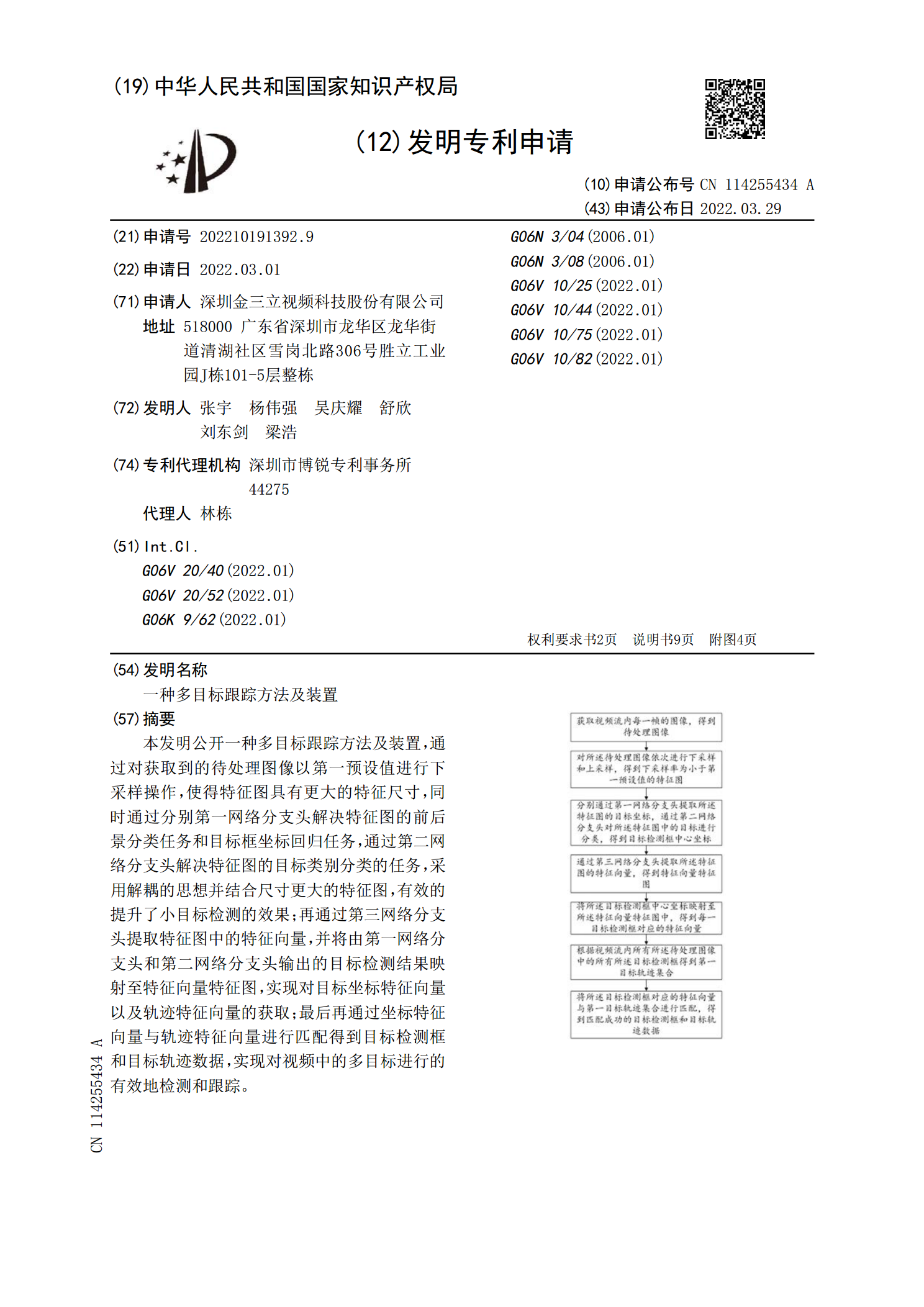
一种多目标跟踪方法及装置.pdf
本发明公开一种多目标跟踪方法及装置,通过对获取到的待处理图像以第一预设值进行下采样操作,使得特征图具有更大的特征尺寸,同时通过分别第一网络分支头解决特征图的前后景分类任务和目标框坐标回归任务,通过第二网络分支头解决特征图的目标类别分类的任务,采用解耦的思想并结合尺寸更大的特征图,有效的提升了小目标检测的效果;再通过第三网络分支头提取特征图中的特征向量,并将由第一网络分支头和第二网络分支头输出的目标检测结果映射至特征向量特征图,实现对目标坐标特征向量以及轨迹特征向量的获取;最后再通过坐标特征向量与轨迹特征向
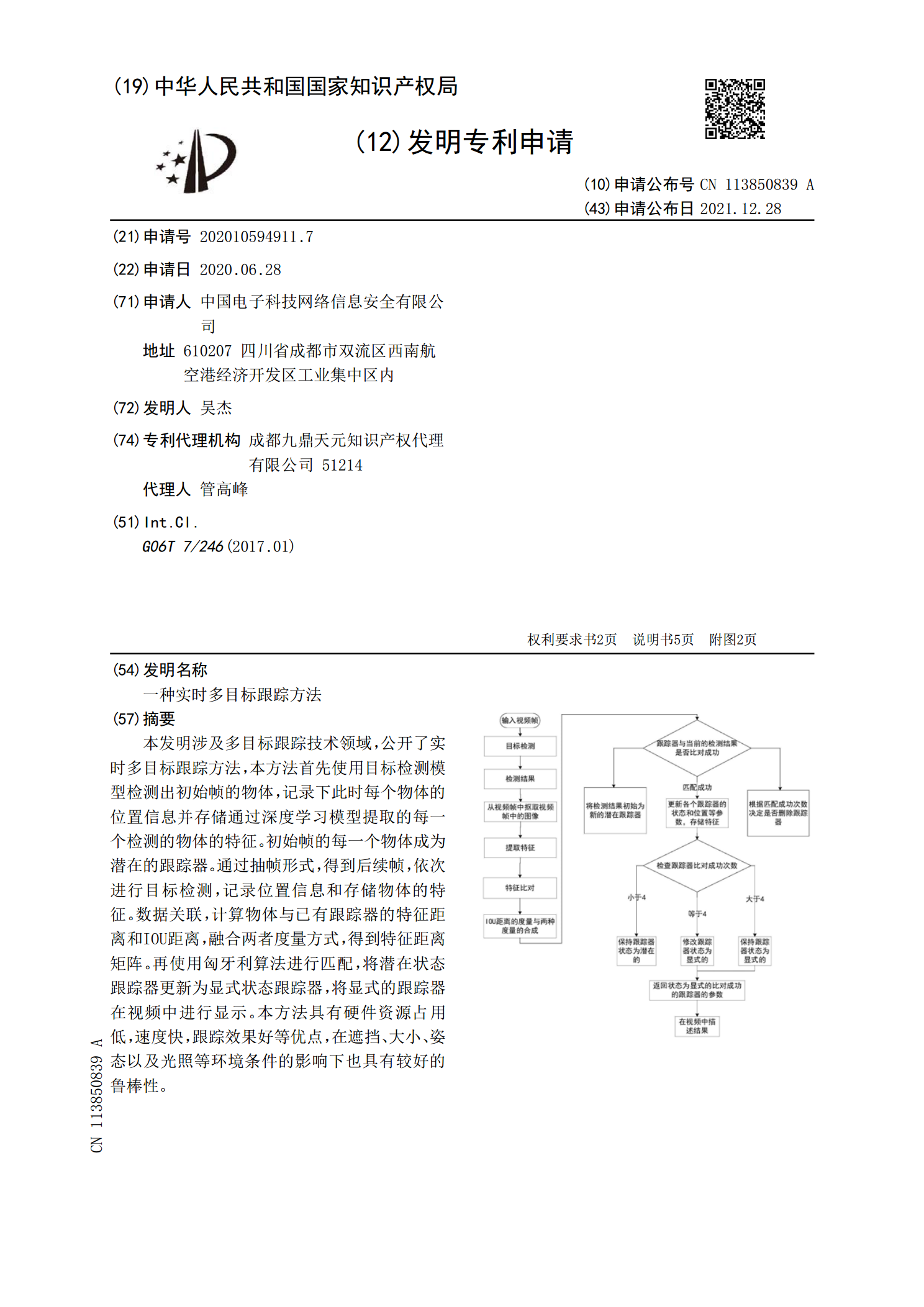
一种实时多目标跟踪方法.pdf
本发明涉及多目标跟踪技术领域,公开了实时多目标跟踪方法,本方法首先使用目标检测模型检测出初始帧的物体,记录下此时每个物体的位置信息并存储通过深度学习模型提取的每一个检测的物体的特征。初始帧的每一个物体成为潜在的跟踪器。通过抽帧形式,得到后续帧,依次进行目标检测,记录位置信息和存储物体的特征。数据关联,计算物体与已有跟踪器的特征距离和IOU距离,融合两者度量方式,得到特征距离矩阵。再使用匈牙利算法进行匹配,将潜在状态跟踪器更新为显式状态跟踪器,将显式的跟踪器在视频中进行显示。本方法具有硬件资源占用低,速度快