
到达角度确定方法及相关产品.pdf

文光****iu

1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共37页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
到达角度确定方法及相关产品.pdf
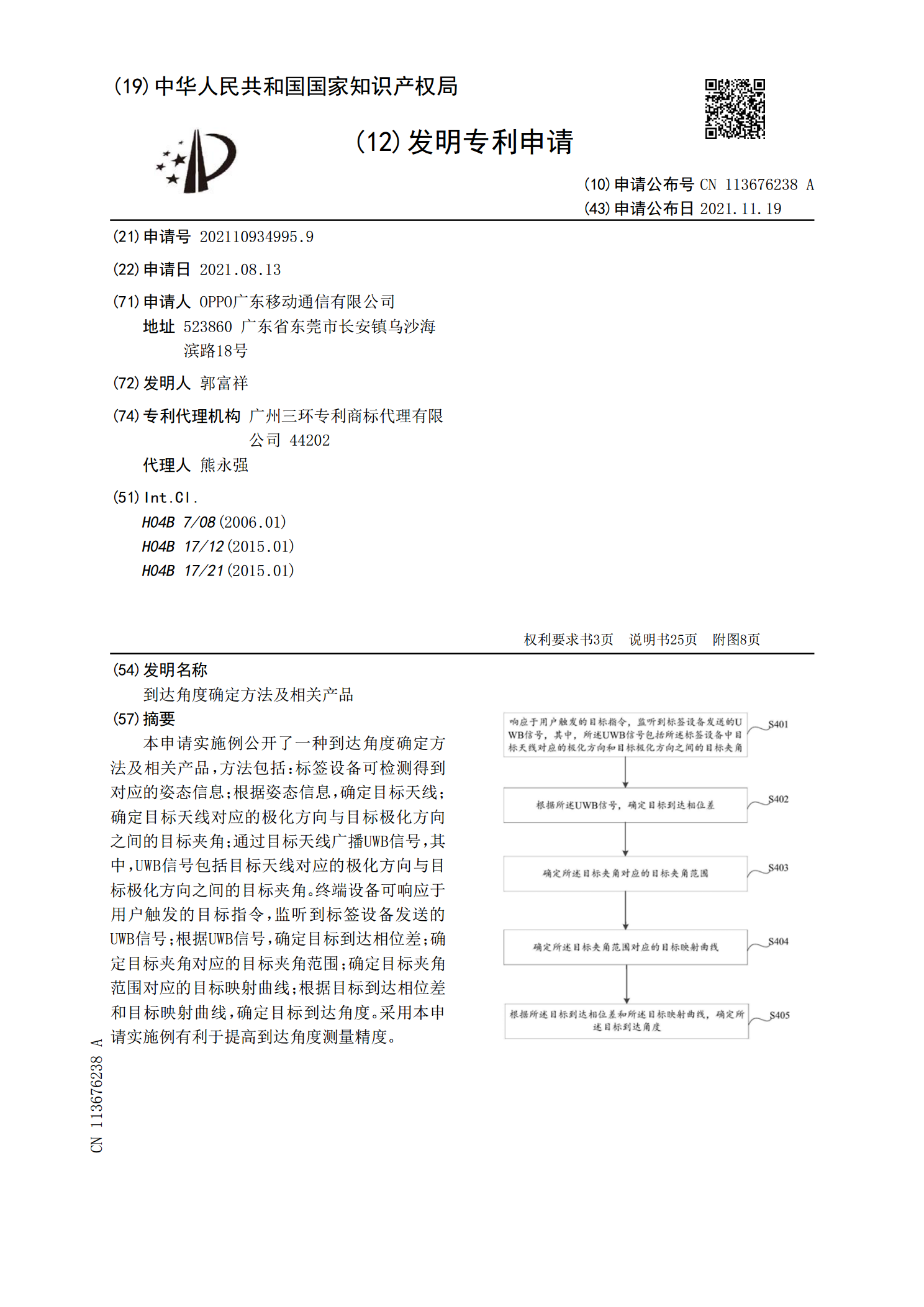
本申请实施例公开了一种到达角度确定方法及相关产品,方法包括:标签设备可检测得到对应的姿态信息;根据姿态信息,确定目标天线;确定目标天线对应的极化方向与目标极化方向之间的目标夹角;通过目标天线广播UWB信号,其中,UWB信号包括目标天线对应的极化方向与目标极化方向之间的目标夹角。终端设备可响应于用户触发的目标指令,监听到标签设备发送的UWB信号;根据UWB信号,确定目标到达相位差;确定目标夹角对应的目标夹角范围;确定目标夹角范围对应的目标映射曲线;根据目标到达相位差和目标映射曲线,确定目标到达角度。采用本申
终端、到达角度测量方法及相关装置.pdf
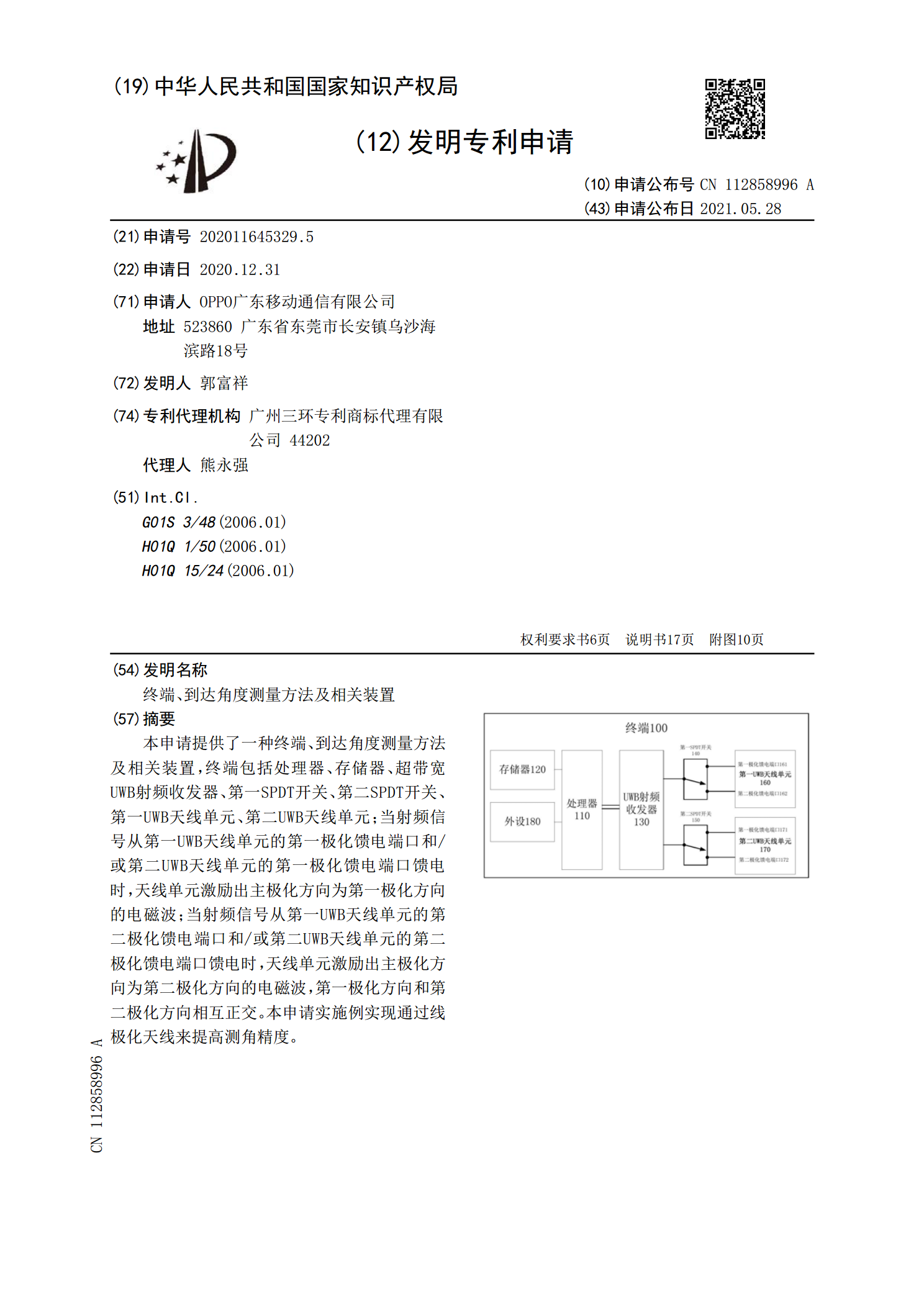
本申请提供了一种终端、到达角度测量方法及相关装置,终端包括处理器、存储器、超带宽UWB射频收发器、第一SPDT开关、第二SPDT开关、第一UWB天线单元、第二UWB天线单元;当射频信号从第一UWB天线单元的第一极化馈电端口和/或第二UWB天线单元的第一极化馈电端口馈电时,天线单元激励出主极化方向为第一极化方向的电磁波;当射频信号从第一UWB天线单元的第二极化馈电端口和/或第二UWB天线单元的第二极化馈电端口馈电时,天线单元激励出主极化方向为第二极化方向的电磁波,第一极化方向和第二极化方向相互正交。本申请实

用于确定拖运卡车到达的系统和方法.pdf
一种方法包括接收与第一拖运卡车相关联的信息,该第一拖运卡车配置为穿过从铺路材料设备延伸到工地的行进路径。该方法还包括将第一拖运卡车识别为具有缺失和故障之一的位置传感器,确定第二拖运卡车是否在第一拖运卡车之前穿过行进路径,以及确定第一拖运卡车的到达时间预计将到达工地。在这种方法中,到达时间至少部分地基于与穿过行进路径的第一拖运卡车相关联的估计的行进时间,或者与在第一拖运卡车之前穿过行进路径的第二拖运卡车相关联的记录的行进时间来确定。

用于确定预置角度的方法、检测牲畜体温的方法及产品.pdf
本发明提供一种用于确定预置角度、牲畜体温的方法、设备和存储介质,其中用于确定红外摄像头预置角度的方法包括:通过所述舵机调节所述红外摄像头的拍摄角度,并在多个拍摄角度下通过所述红外摄像头获取目标养殖栏的多个红外图像;识别所述多个红外图像中牲畜的数量;比较所述多个红外图像中牲畜的数量,将其中牲畜数量最大的红外图像所对应的拍摄角度作为所述红外摄像头在所述目标养殖栏的预置角度。本发明的技术方案可以得到养殖栏内所有或者数量尽可能多的牲畜的体温,与现有的方案相比,可以提高对牲畜体温检测的可靠性。

隔离区域确定方法及相关产品.pdf
本申请实施例公开了一种隔离区域确定方法及相关产品,该方法包括:对待处理区域进行网格化处理,得到多个网格区域;获取所述多个网格区域中每个网格区域中的目标人员的地理位置;根据所述每个网格区域中的目标人员的地理位置,确定所述待处理区域中的隔离区域。本申请实施例有利于提高隔离区域的选取精度。