
标定数据生成方法、装置及标定数据生成系统.pdf

一吃****仕龙


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
标定数据生成方法、装置及标定数据生成系统.pdf
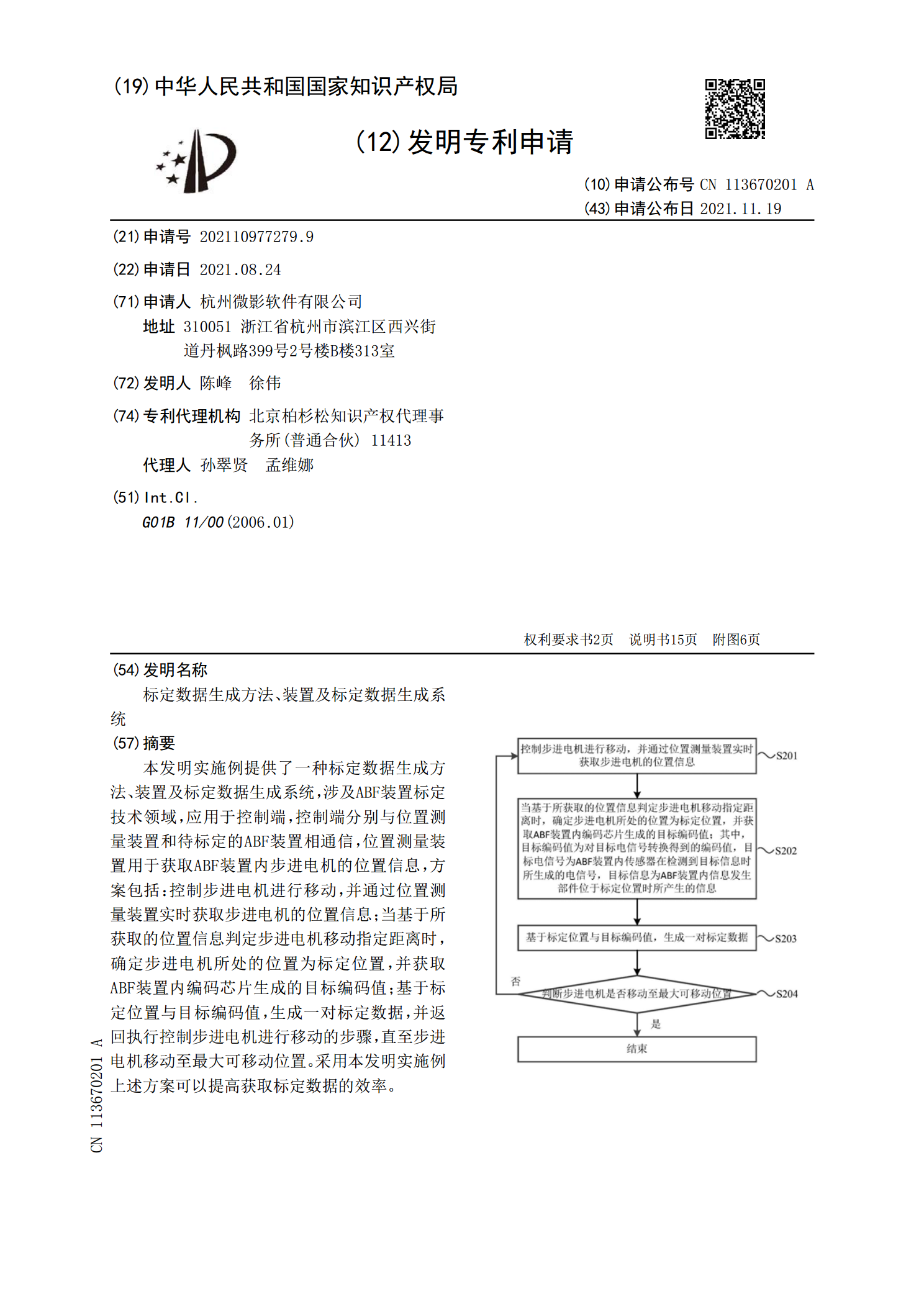
本发明实施例提供了一种标定数据生成方法、装置及标定数据生成系统,涉及ABF装置标定技术领域,应用于控制端,控制端分别与位置测量装置和待标定的ABF装置相通信,位置测量装置用于获取ABF装置内步进电机的位置信息,方案包括:控制步进电机进行移动,并通过位置测量装置实时获取步进电机的位置信息;当基于所获取的位置信息判定步进电机移动指定距离时,确定步进电机所处的位置为标定位置,并获取ABF装置内编码芯片生成的目标编码值;基于标定位置与目标编码值,生成一对标定数据,并返回执行控制步进电机进行移动的步骤,直至步进电机
位姿标定数据集生成方法、装置、系统、电子设备及介质.pdf
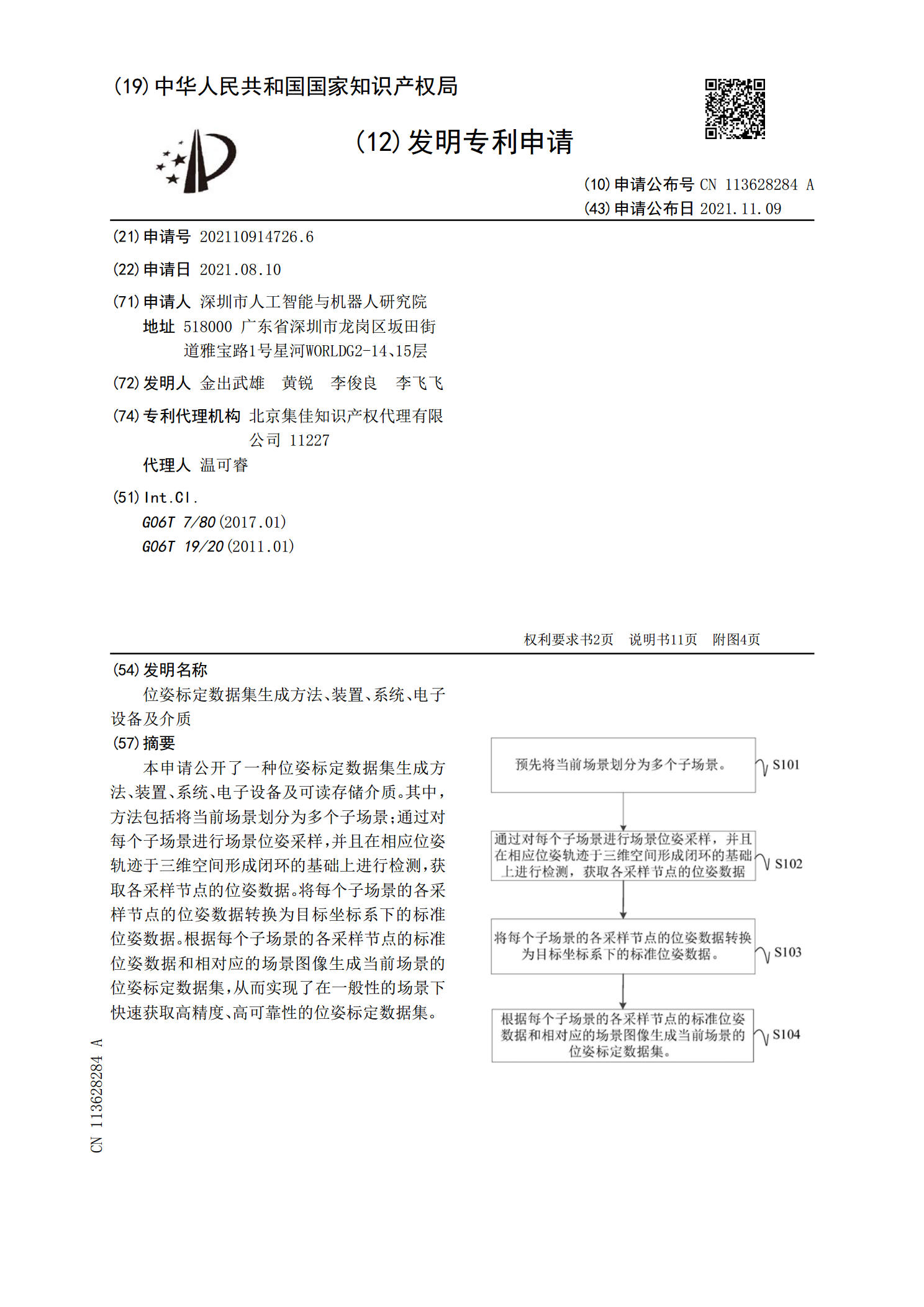
本申请公开了一种位姿标定数据集生成方法、装置、系统、电子设备及可读存储介质。其中,方法包括将当前场景划分为多个子场景;通过对每个子场景进行场景位姿采样,并且在相应位姿轨迹于三维空间形成闭环的基础上进行检测,获取各采样节点的位姿数据。将每个子场景的各采样节点的位姿数据转换为目标坐标系下的标准位姿数据。根据每个子场景的各采样节点的标准位姿数据和相对应的场景图像生成当前场景的位姿标定数据集,从而实现了在一般性的场景下快速获取高精度、高可靠性的位姿标定数据集。
一种弱标签语义分割标定数据生成方法及系统.pdf
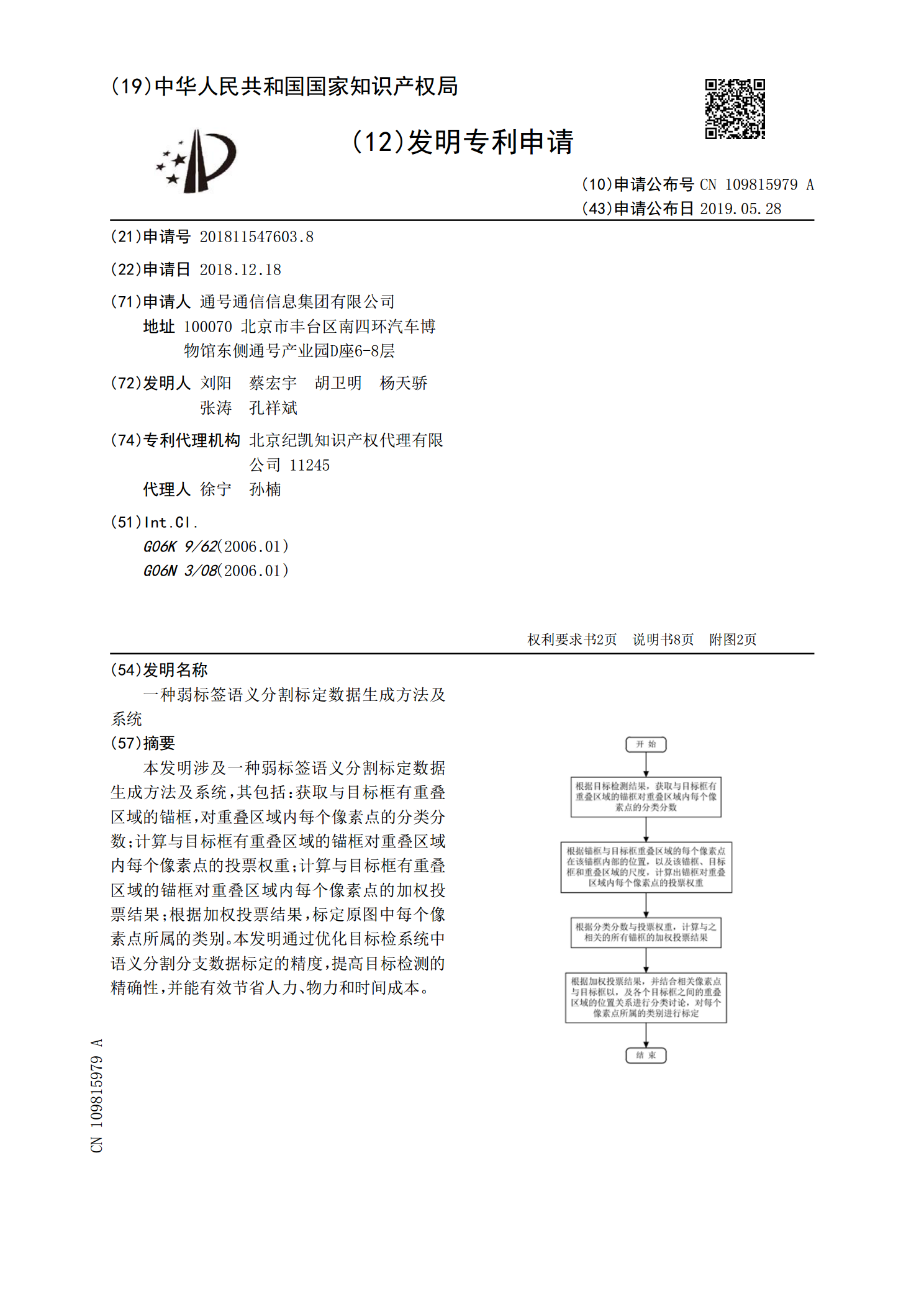
本发明涉及一种弱标签语义分割标定数据生成方法及系统,其包括:获取与目标框有重叠区域的锚框,对重叠区域内每个像素点的分类分数;计算与目标框有重叠区域的锚框对重叠区域内每个像素点的投票权重;计算与目标框有重叠区域的锚框对重叠区域内每个像素点的加权投票结果;根据加权投票结果,标定原图中每个像素点所属的类别。本发明通过优化目标检系统中语义分割分支数据标定的精度,提高目标检测的精确性,并能有效节省人力、物力和时间成本。
标定器生成方法和装置、对抗鲁棒性标定方法和装置.pdf
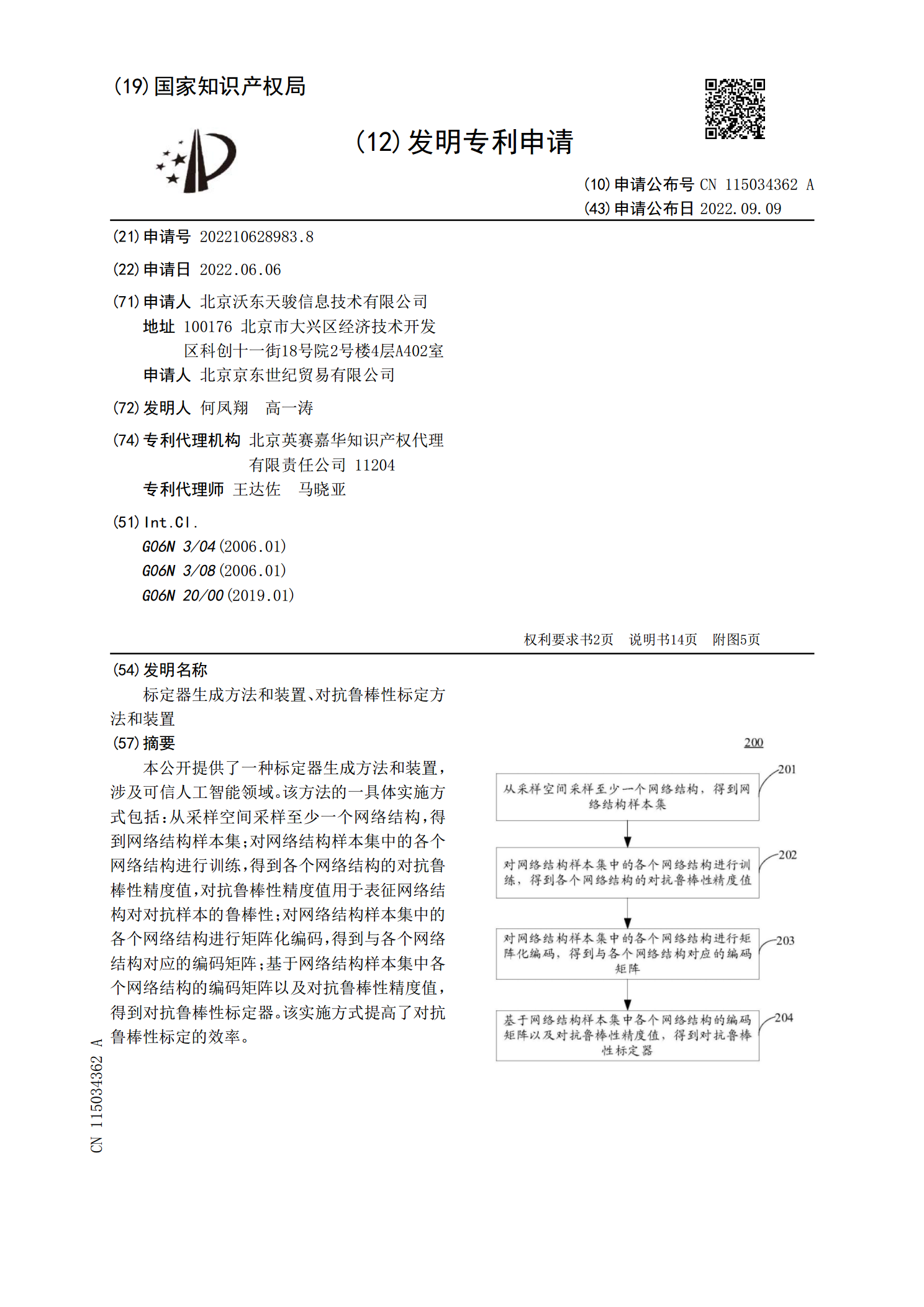
本公开提供了一种标定器生成方法和装置,涉及可信人工智能领域。该方法的一具体实施方式包括:从采样空间采样至少一个网络结构,得到网络结构样本集;对网络结构样本集中的各个网络结构进行训练,得到各个网络结构的对抗鲁棒性精度值,对抗鲁棒性精度值用于表征网络结构对对抗样本的鲁棒性;对网络结构样本集中的各个网络结构进行矩阵化编码,得到与各个网络结构对应的编码矩阵;基于网络结构样本集中各个网络结构的编码矩阵以及对抗鲁棒性精度值,得到对抗鲁棒性标定器。该实施方式提高了对抗鲁棒性标定的效率。

数据生成装置、数据生成方法、数据生成程序及记录介质.pdf
本发明提供数据生成装置、数据生成方法、数据生成程序及记录介质。数据生成装置生成能够防止显示在画面上的内容被正确地复制的数据。数据生成装置包括:取得单元,其取得静态图像数据;静态图像数据生成单元,其生成规定数量的掩蔽所取得的静态图像数据的至少一部分像素而得到的静态图像数据,在该规定数量的静态画数据中的至少2个静态图像数据之间,使进行掩蔽的像素中的至少一部分像素的位置互不相同;以及动态图像数据生成单元,其生成以规定帧率显示所生成的各静态图像数据的动态图像数据。