
标定器生成方法和装置、对抗鲁棒性标定方法和装置.pdf

是湛****21

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
标定器生成方法和装置、对抗鲁棒性标定方法和装置.pdf
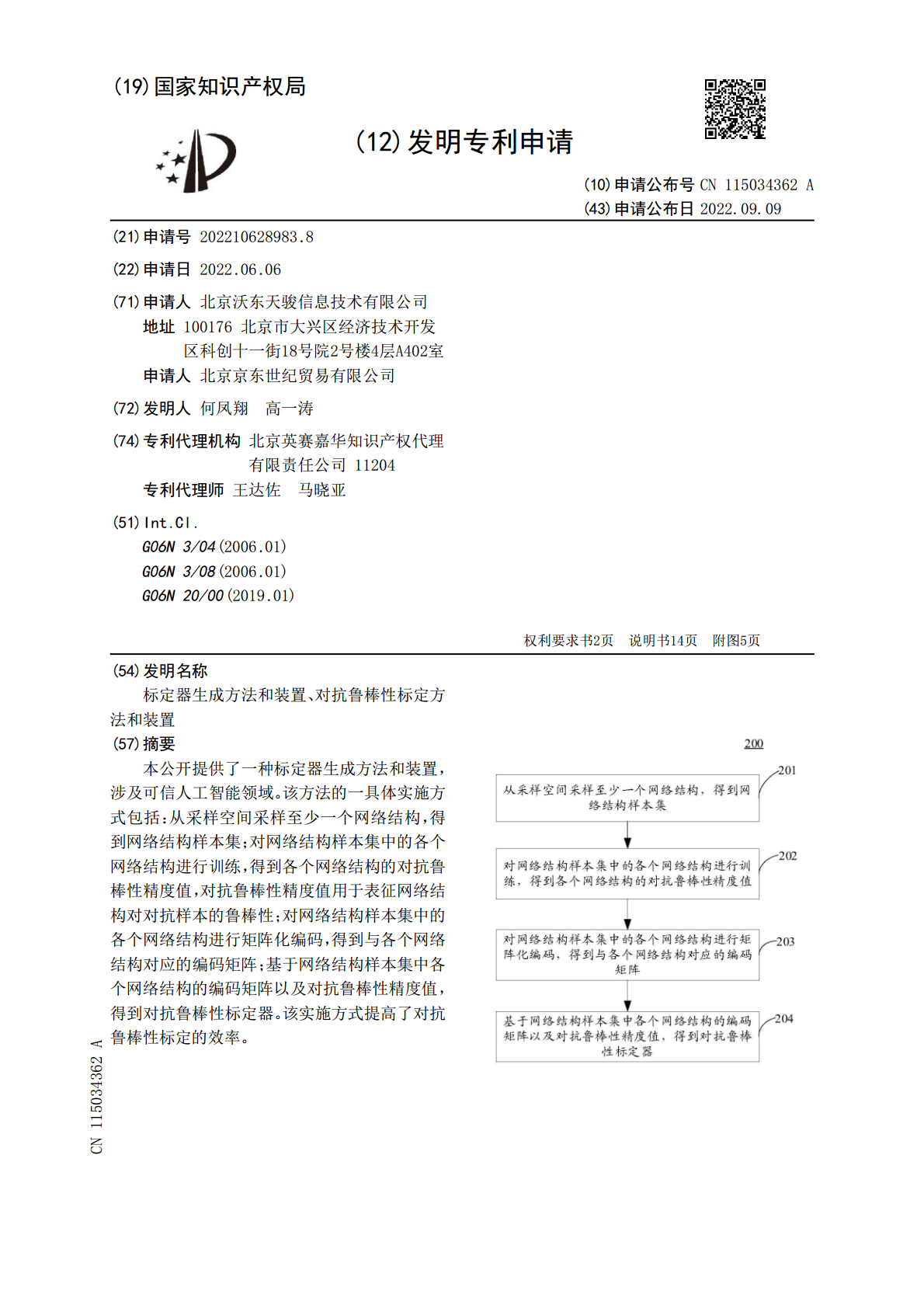
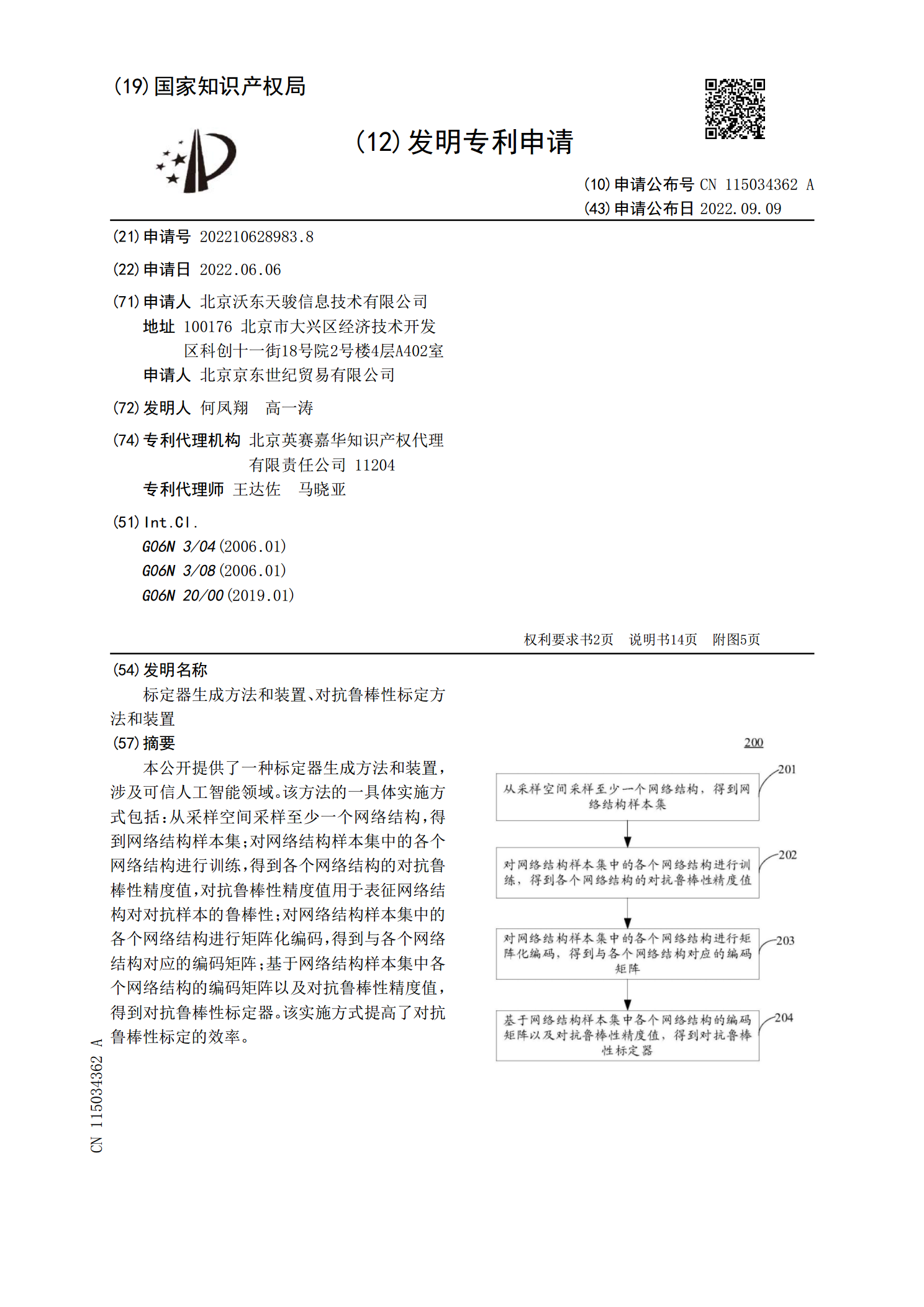
本公开提供了一种标定器生成方法和装置,涉及可信人工智能领域。该方法的一具体实施方式包括:从采样空间采样至少一个网络结构,得到网络结构样本集;对网络结构样本集中的各个网络结构进行训练,得到各个网络结构的对抗鲁棒性精度值,对抗鲁棒性精度值用于表征网络结构对对抗样本的鲁棒性;对网络结构样本集中的各个网络结构进行矩阵化编码,得到与各个网络结构对应的编码矩阵;基于网络结构样本集中各个网络结构的编码矩阵以及对抗鲁棒性精度值,得到对抗鲁棒性标定器。该实施方式提高了对抗鲁棒性标定的效率。
图像标定方法和装置.pdf
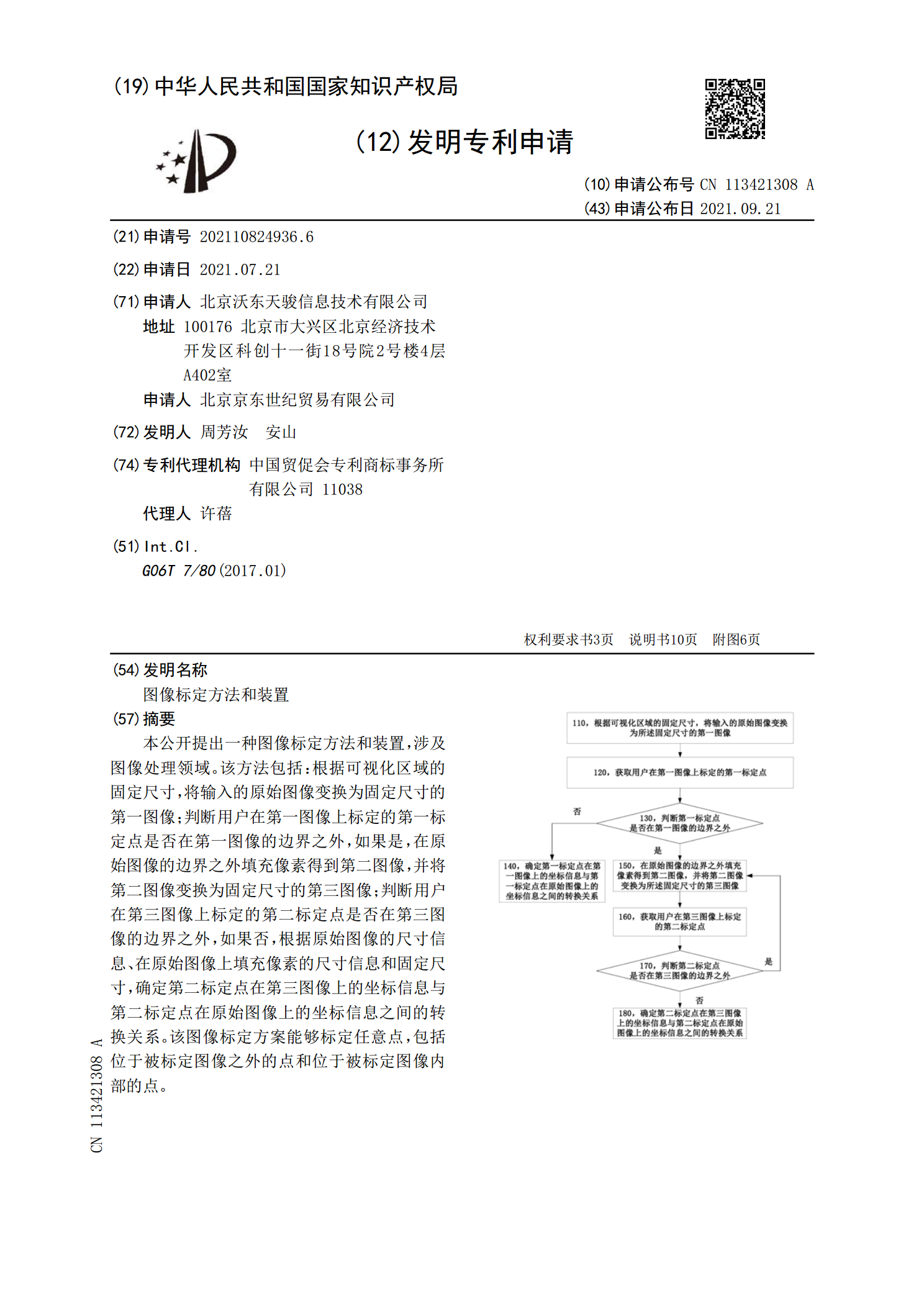
本公开提出一种图像标定方法和装置,涉及图像处理领域。该方法包括:根据可视化区域的固定尺寸,将输入的原始图像变换为固定尺寸的第一图像;判断用户在第一图像上标定的第一标定点是否在第一图像的边界之外,如果是,在原始图像的边界之外填充像素得到第二图像,并将第二图像变换为固定尺寸的第三图像;判断用户在第三图像上标定的第二标定点是否在第三图像的边界之外,如果否,根据原始图像的尺寸信息、在原始图像上填充像素的尺寸信息和固定尺寸,确定第二标定点在第三图像上的坐标信息与第二标定点在原始图像上的坐标信息之间的转换关系。该图像
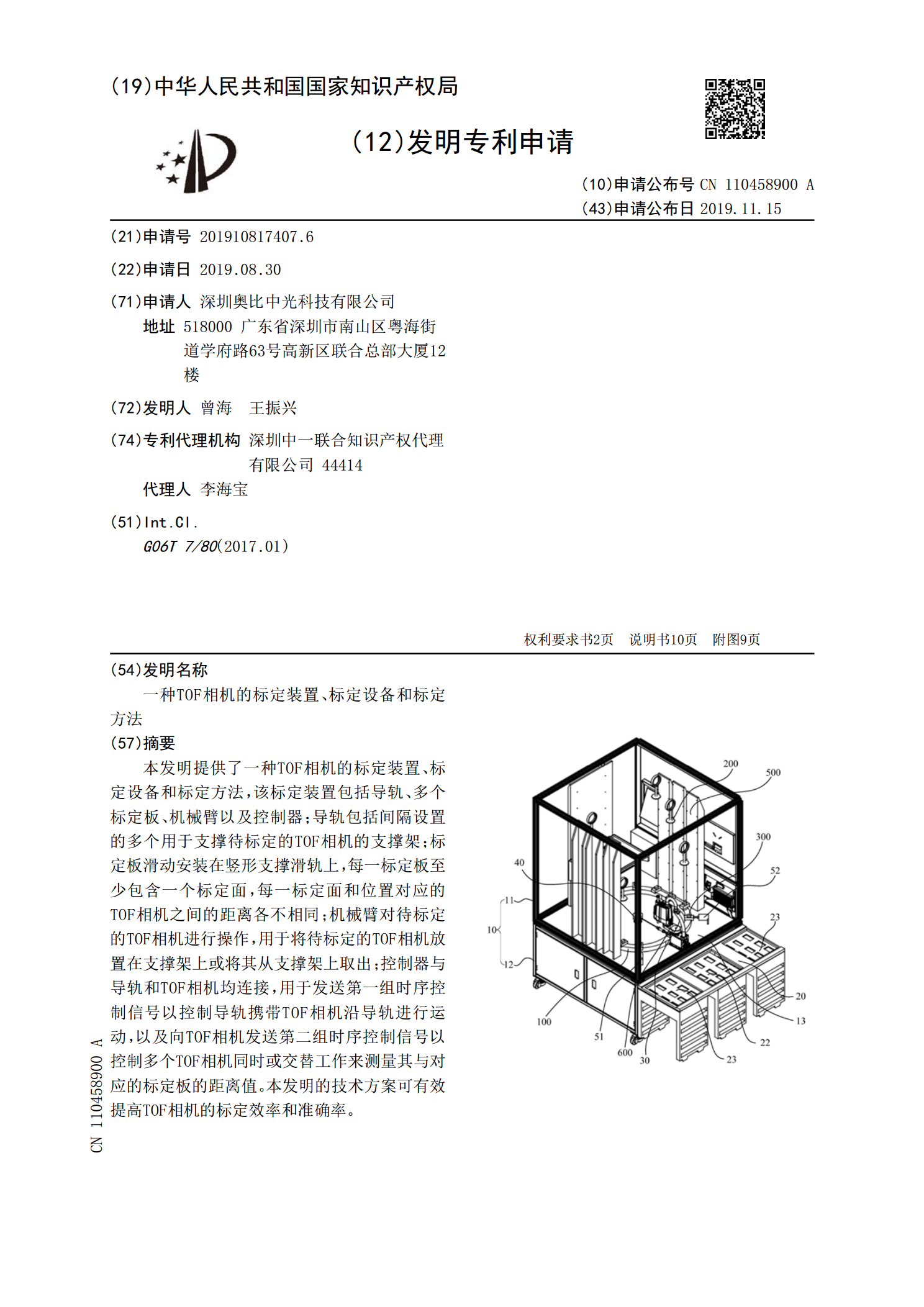
一种TOF相机的标定装置、标定设备和标定方法.pdf
本发明提供了一种TOF相机的标定装置、标定设备和标定方法,该标定装置包括导轨、多个标定板、机械臂以及控制器;导轨包括间隔设置的多个用于支撑待标定的TOF相机的支撑架;标定板滑动安装在竖形支撑滑轨上,每一标定板至少包含一个标定面,每一标定面和位置对应的TOF相机之间的距离各不相同;机械臂对待标定的TOF相机进行操作,用于将待标定的TOF相机放置在支撑架上或将其从支撑架上取出;控制器与导轨和TOF相机均连接,用于发送第一组时序控制信号以控制导轨携带TOF相机沿导轨进行运动,以及向TOF相机发送第二组时序控制信

翻译、对抗样本生成、模型鲁棒性增强方法及相关装置.pdf
本申请公开了翻译、对抗样本生成、模型鲁棒性增强方法及相关装置,利用预训练的鲁棒性增强的机器翻译模型对待翻译文本进行翻译,得到文本翻译结果,鲁棒性增强的机器翻译模型以标注参考翻译文本标签的训练对抗样本作为训练数据进行对抗性训练,训练对抗样本通过对训练源输入文本中的待替换词用候选的同义词替换得到,候选的同义词为根据训练源输入文本添加待替换词的候选词集中的词对应的正则化后的扰动信息前后文本的信息散度,以及候选词集中的词替换待替换词前后文本的语义相似度,从候选词集中筛选出的词。本申请在尽可能小的扰动下得到训练对抗

用于标定电机的方法和控制装置.pdf
本公开涉及一种标定电机的方法和控制装置。电机包括转子和定子绕组,定子绕组包括第一定子绕组、第二定子绕组和第三定子绕组,在电机中安装有位置传感器,用于确定转子相对于定子绕组的相对位置。根据一个方面,所述方法包括:以第一模式向定子绕组施加电压,使得转子转动到第一取向;以不同于所述第一模式的第二模式向定子绕组施加电压,使得所述转子从所述第一取向转动;以及根据转子在第二模式期间的转动方向以及位置传感器测得的角度来确定位置传感器的电气零位与电机的电气零位之间的偏差角度。