
空间目标姿态反演方法、装置、计算设备及存储介质.pdf

秀华****魔王

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

空间目标姿态反演方法、装置、计算设备及存储介质.pdf
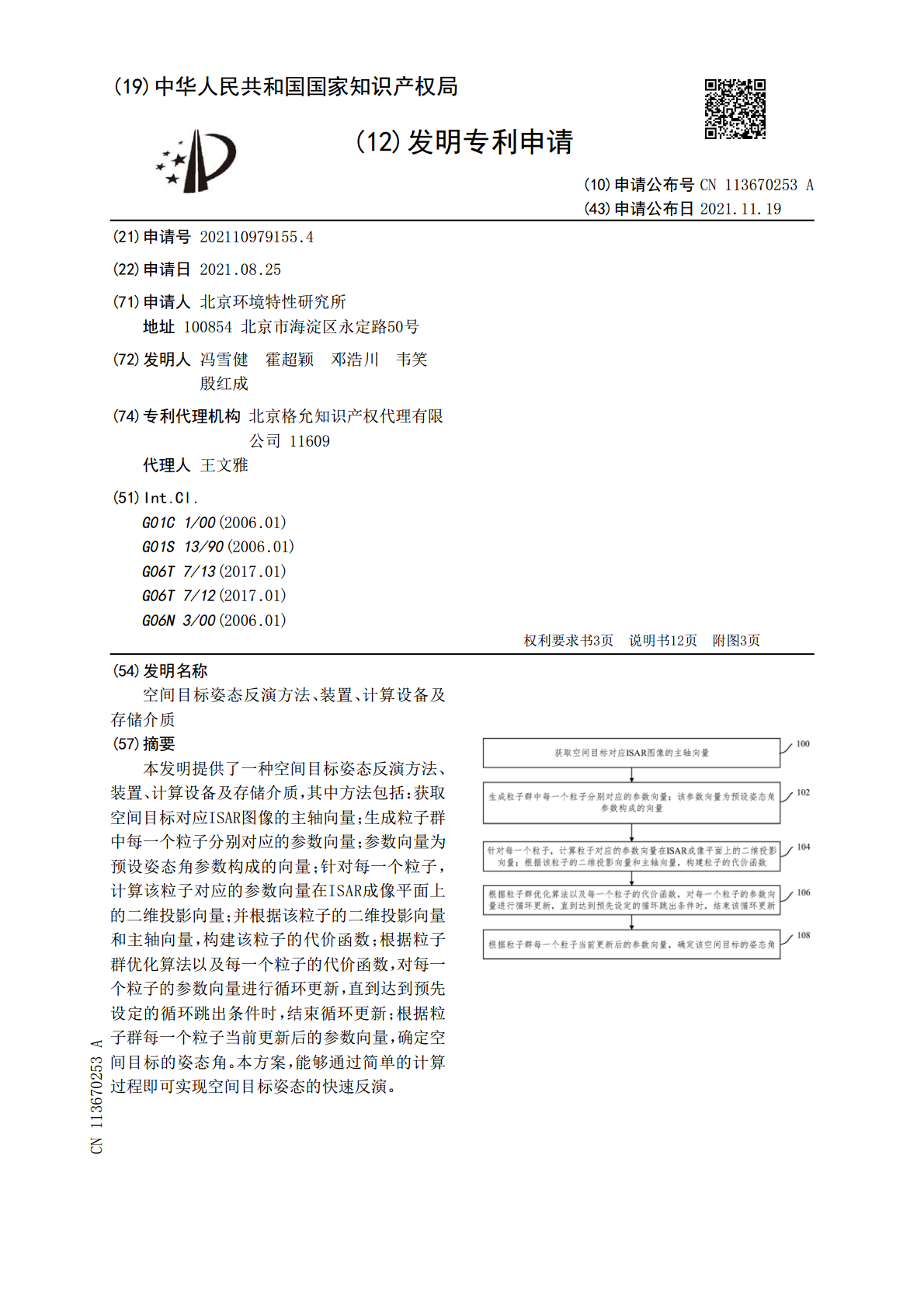
本发明提供了一种空间目标姿态反演方法、装置、计算设备及存储介质,其中方法包括:获取空间目标对应ISAR图像的主轴向量;生成粒子群中每一个粒子分别对应的参数向量;参数向量为预设姿态角参数构成的向量;针对每一个粒子,计算该粒子对应的参数向量在ISAR成像平面上的二维投影向量;并根据该粒子的二维投影向量和主轴向量,构建该粒子的代价函数;根据粒子群优化算法以及每一个粒子的代价函数,对每一个粒子的参数向量进行循环更新,直到达到预先设定的循环跳出条件时,结束循环更新;根据粒子群每一个粒子当前更新后的参数向量,确定空间

空间交互装置的姿态显示方法、装置、设备及其存储介质.pdf
本申请公开了一种空间交互装置的姿态显示方法、装置、设备及其存储介质,属于虚拟现实技术领域。所述空间交互装置的姿态显示方法包括:动态获取图像采集设备采集的第一图像,其中,所述第一图像为空间交互装置上设置的光源的发光图像;根据预设图像识别算法,识别所述第一图像中的有效光斑,其中,所述有效光斑为所述空间交互装置上设置的光源发出的光斑;根据所述有效光斑,确定所述空间交互装置的真实前点和真实后点;根据所述空间交互装置的真实前点和真实后点,在虚拟显示设备中显示所述空间交互装置的虚拟姿态。本申请解决了现有技术对空间交互
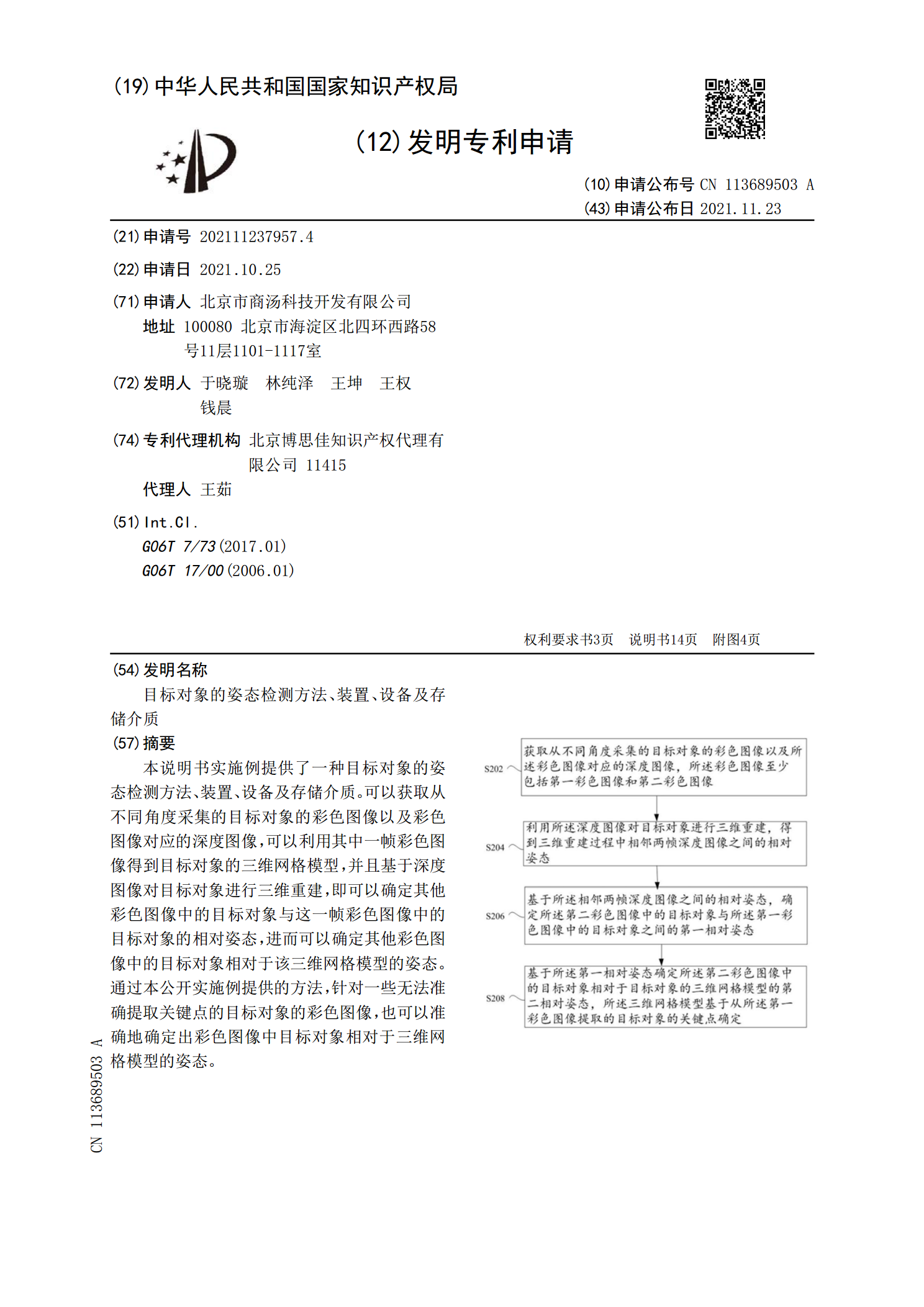
目标对象的姿态检测方法、装置、设备及存储介质.pdf
本说明书实施例提供了一种目标对象的姿态检测方法、装置、设备及存储介质。可以获取从不同角度采集的目标对象的彩色图像以及彩色图像对应的深度图像,可以利用其中一帧彩色图像得到目标对象的三维网格模型,并且基于深度图像对目标对象进行三维重建,即可以确定其他彩色图像中的目标对象与这一帧彩色图像中的目标对象的相对姿态,进而可以确定其他彩色图像中的目标对象相对于该三维网格模型的姿态。通过本公开实施例提供的方法,针对一些无法准确提取关键点的目标对象的彩色图像,也可以准确地确定出彩色图像中目标对象相对于三维网格模型的姿态。

一种自旋空间目标姿态估计方法、系统、装置及存储介质.pdf
本发明公开了一种自旋空间目标姿态估计方法、系统、装置及存储介质,方法包括:通过多个ISAR雷达系统获取预设时间段内的多个第一回波信号后进行距离‑多普勒处理,得到第一雷达图像序列;提取出目标投影长度特征结构的目标距离维度尺寸和目标多普勒维度尺寸;确定各ISAR雷达系统的中心雷达视线方向向量;根据目标距离维度尺寸、目标多普勒维度尺寸和中心雷达视线方向向量构建第一优化模型和第二优化模型,并利用粒子群算法求解得到目标瞬时姿态参数和目标自旋参数,从而完成对自旋空间目标的姿态估计。本发明可实现对自旋空间目标在轨瞬时状
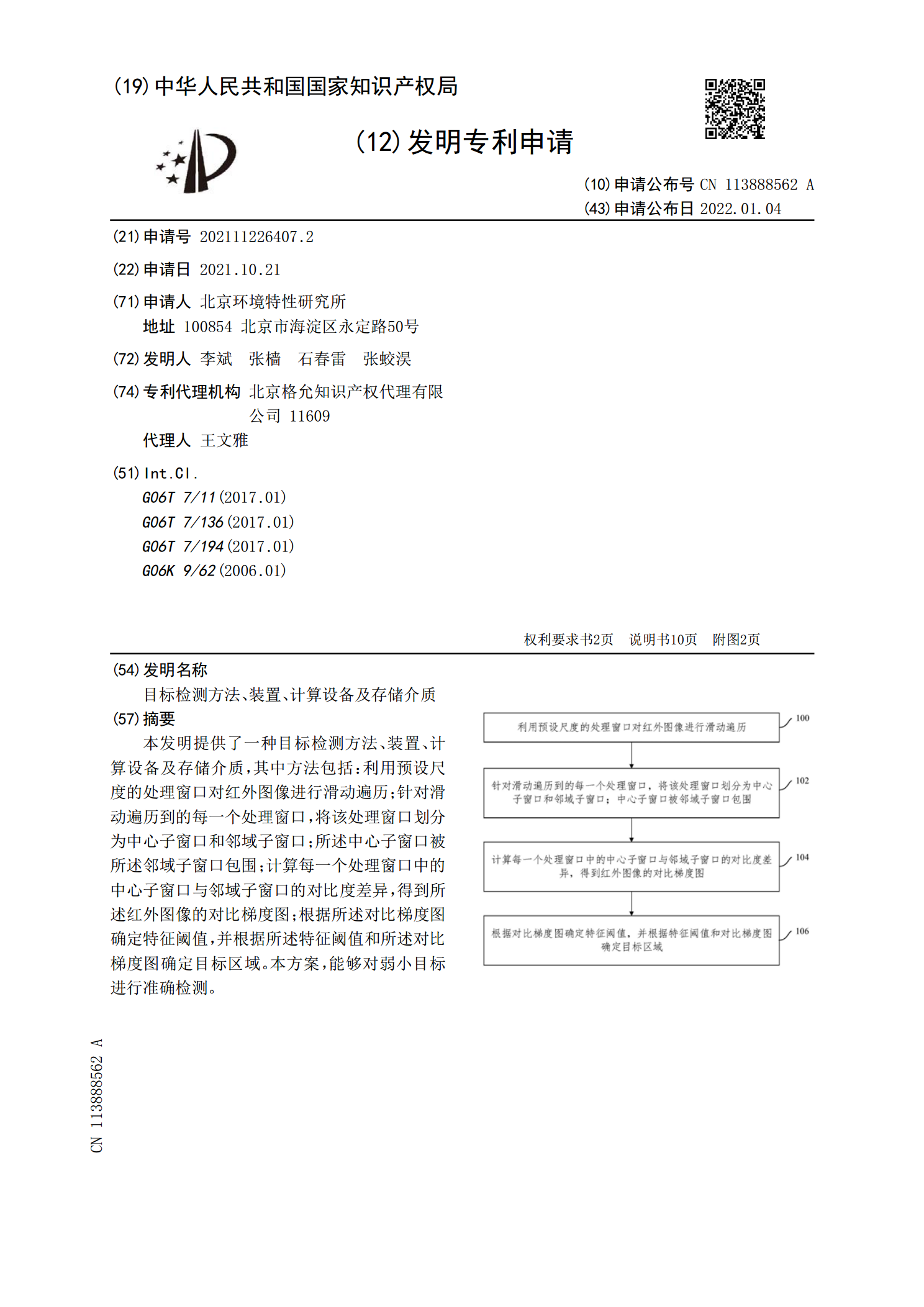
目标检测方法、装置、计算设备及存储介质.pdf
本发明提供了一种目标检测方法、装置、计算设备及存储介质,其中方法包括:利用预设尺度的处理窗口对红外图像进行滑动遍历;针对滑动遍历到的每一个处理窗口,将该处理窗口划分为中心子窗口和邻域子窗口;所述中心子窗口被所述邻域子窗口包围;计算每一个处理窗口中的中心子窗口与邻域子窗口的对比度差异,得到所述红外图像的对比梯度图;根据所述对比梯度图确定特征阈值,并根据所述特征阈值和所述对比梯度图确定目标区域。本方案,能够对弱小目标进行准确检测。