
目标对象的姿态检测方法、装置、设备及存储介质.pdf

一吃****昕靓

1/10
2/10
3/10
4/10

5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
目标对象的姿态检测方法、装置、设备及存储介质.pdf
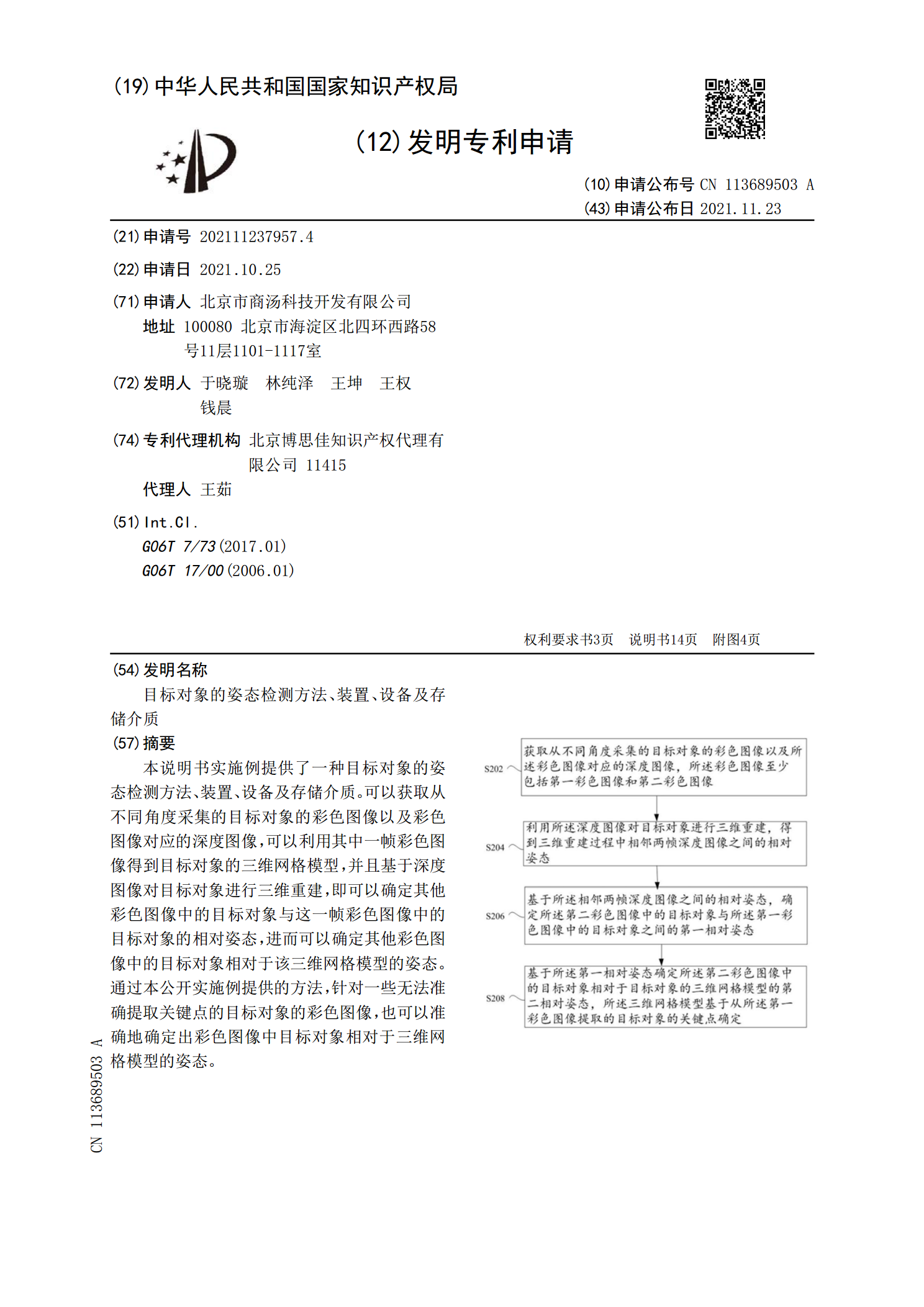
本说明书实施例提供了一种目标对象的姿态检测方法、装置、设备及存储介质。可以获取从不同角度采集的目标对象的彩色图像以及彩色图像对应的深度图像,可以利用其中一帧彩色图像得到目标对象的三维网格模型,并且基于深度图像对目标对象进行三维重建,即可以确定其他彩色图像中的目标对象与这一帧彩色图像中的目标对象的相对姿态,进而可以确定其他彩色图像中的目标对象相对于该三维网格模型的姿态。通过本公开实施例提供的方法,针对一些无法准确提取关键点的目标对象的彩色图像,也可以准确地确定出彩色图像中目标对象相对于三维网格模型的姿态。
对象姿态迁移方法、装置、设备及存储介质.pdf
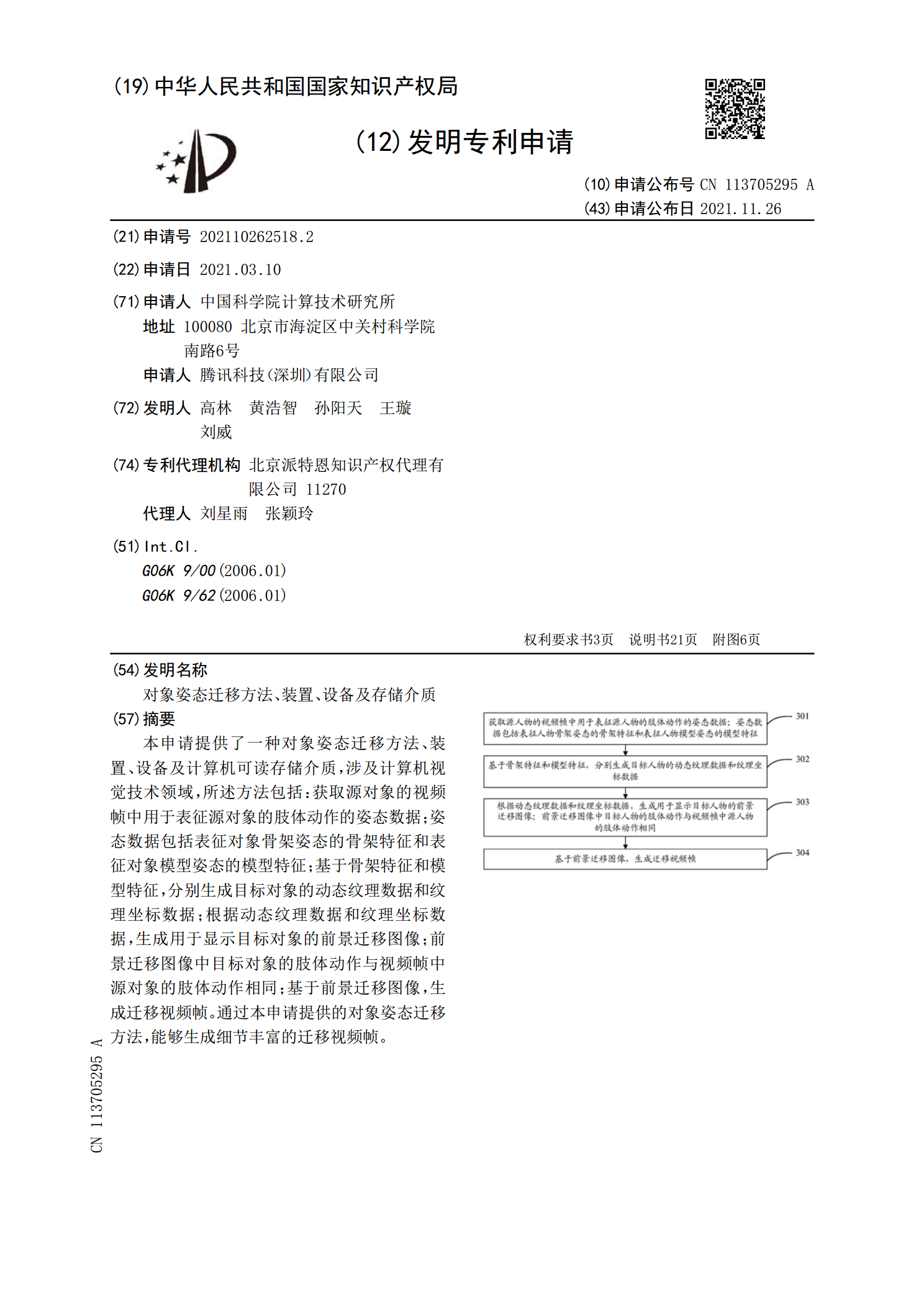
本申请提供了一种对象姿态迁移方法、装置、设备及计算机可读存储介质,涉及计算机视觉技术领域,所述方法包括:获取源对象的视频帧中用于表征源对象的肢体动作的姿态数据;姿态数据包括表征对象骨架姿态的骨架特征和表征对象模型姿态的模型特征;基于骨架特征和模型特征,分别生成目标对象的动态纹理数据和纹理坐标数据;根据动态纹理数据和纹理坐标数据,生成用于显示目标对象的前景迁移图像;前景迁移图像中目标对象的肢体动作与视频帧中源对象的肢体动作相同;基于前景迁移图像,生成迁移视频帧。通过本申请提供的对象姿态迁移方法,能够生成细节
目标对象检测方法、装置及设备、存储介质.pdf
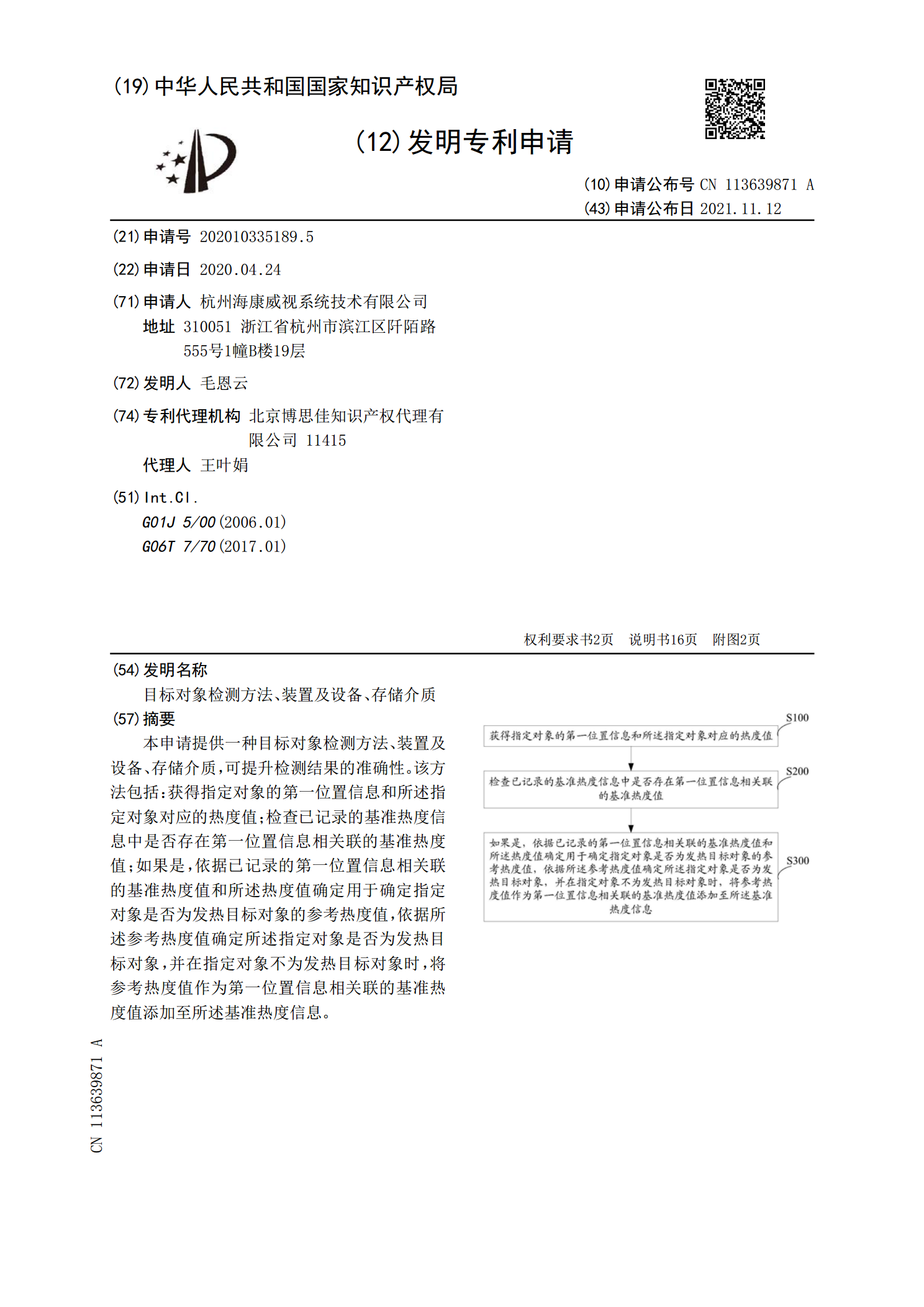
本申请提供一种目标对象检测方法、装置及设备、存储介质,可提升检测结果的准确性。该方法包括:获得指定对象的第一位置信息和所述指定对象对应的热度值;检查已记录的基准热度信息中是否存在第一位置信息相关联的基准热度值;如果是,依据已记录的第一位置信息相关联的基准热度值和所述热度值确定用于确定指定对象是否为发热目标对象的参考热度值,依据所述参考热度值确定所述指定对象是否为发热目标对象,并在指定对象不为发热目标对象时,将参考热度值作为第一位置信息相关联的基准热度值添加至所述基准热度信息。
目标对象检测方法、装置、电子设备及存储介质.pdf
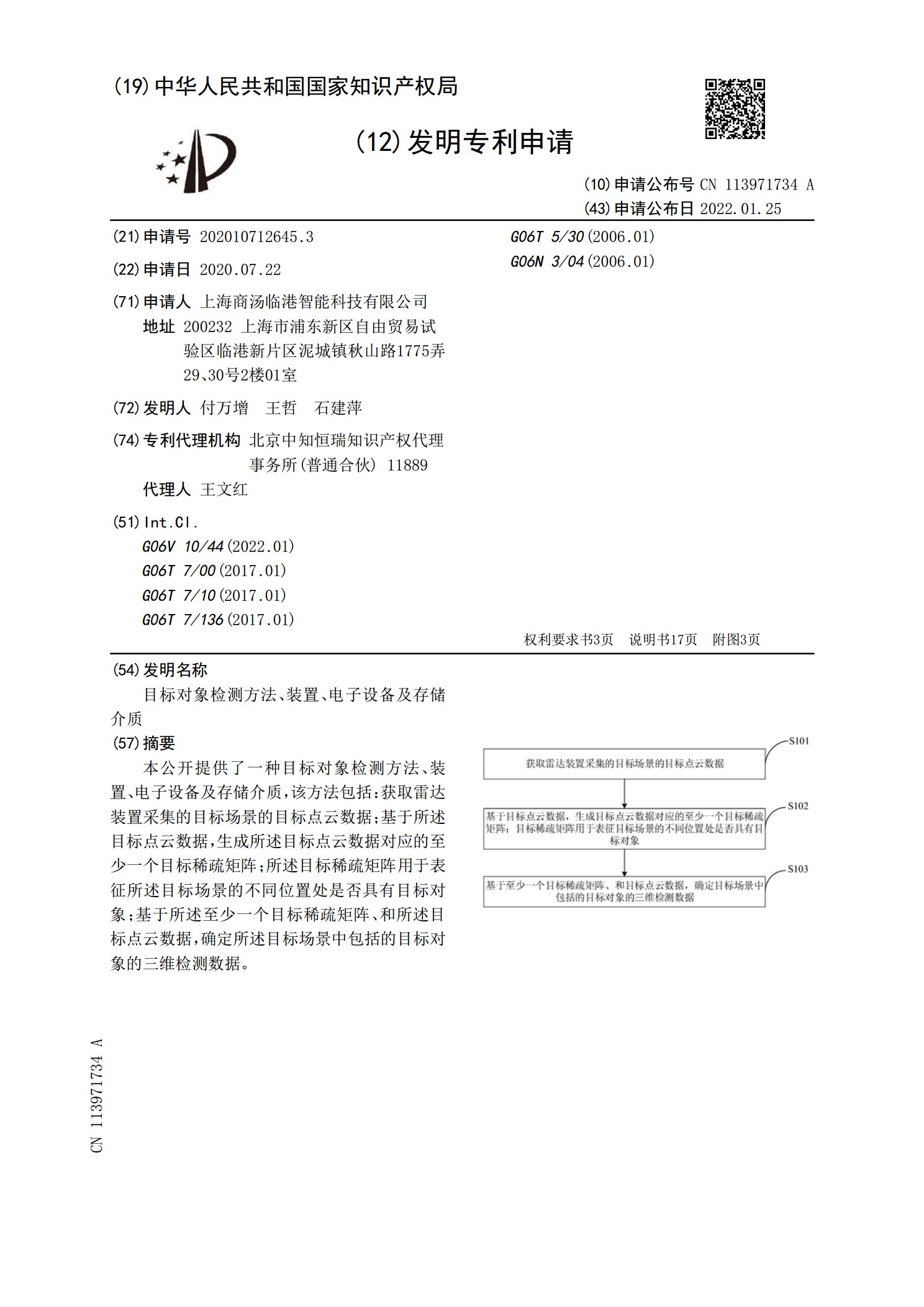
本公开提供了一种目标对象检测方法、装置、电子设备及存储介质,该方法包括:获取雷达装置采集的目标场景的目标点云数据;基于所述目标点云数据,生成所述目标点云数据对应的至少一个目标稀疏矩阵;所述目标稀疏矩阵用于表征所述目标场景的不同位置处是否具有目标对象;基于所述至少一个目标稀疏矩阵、和所述目标点云数据,确定所述目标场景中包括的目标对象的三维检测数据。
对象检测方法、装置、设备及存储介质.pdf
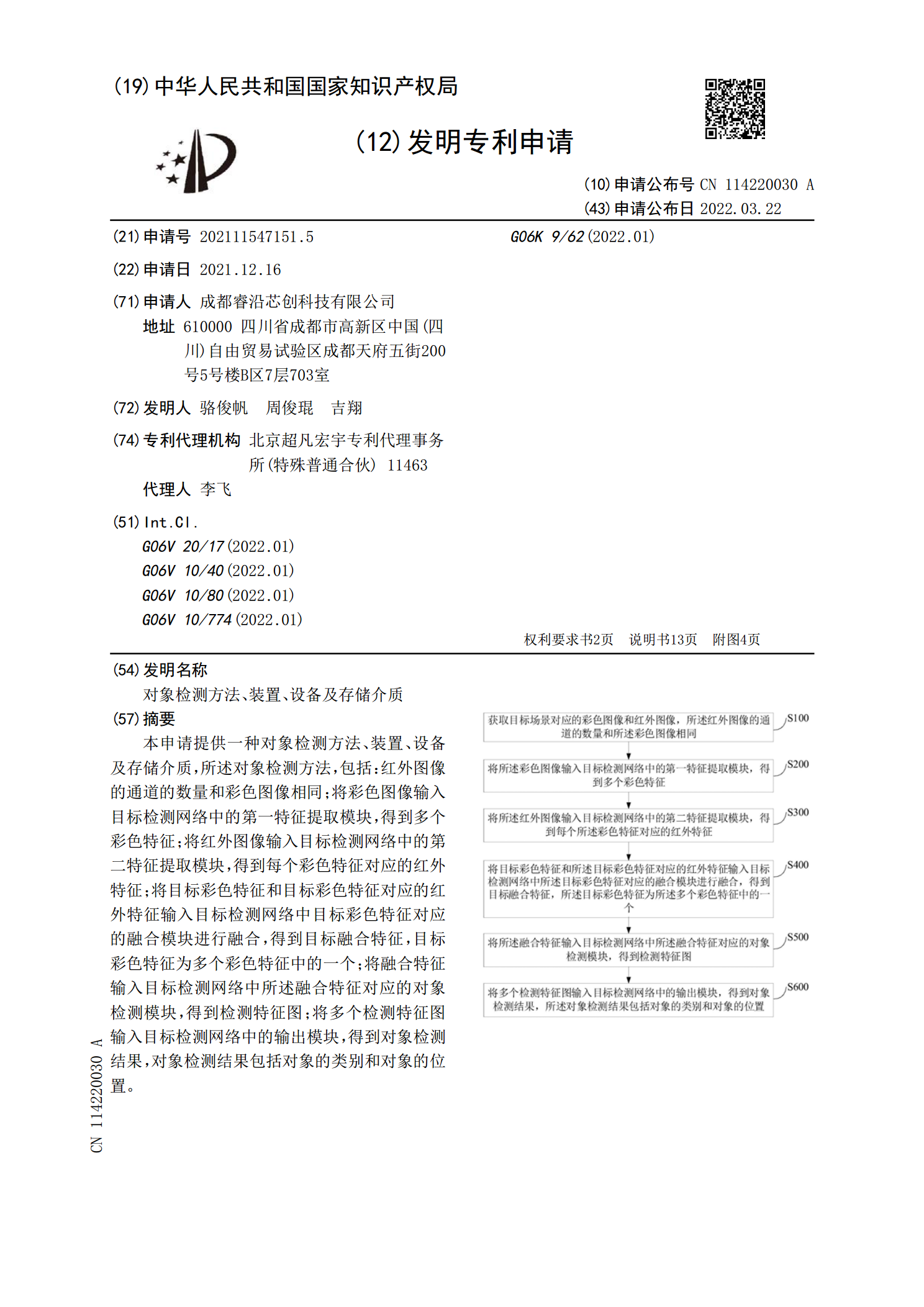
本申请提供一种对象检测方法、装置、设备及存储介质,所述对象检测方法,包括:红外图像的通道的数量和彩色图像相同;将彩色图像输入目标检测网络中的第一特征提取模块,得到多个彩色特征;将红外图像输入目标检测网络中的第二特征提取模块,得到每个彩色特征对应的红外特征;将目标彩色特征和目标彩色特征对应的红外特征输入目标检测网络中目标彩色特征对应的融合模块进行融合,得到目标融合特征,目标彩色特征为多个彩色特征中的一个;将融合特征输入目标检测网络中所述融合特征对应的对象检测模块,得到检测特征图;将多个检测特征图输入目标检测