
误差测量方法、装置、电子设备及可读存储介质.pdf

猫巷****婉慧

1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

误差测量方法、装置、电子设备及可读存储介质.pdf
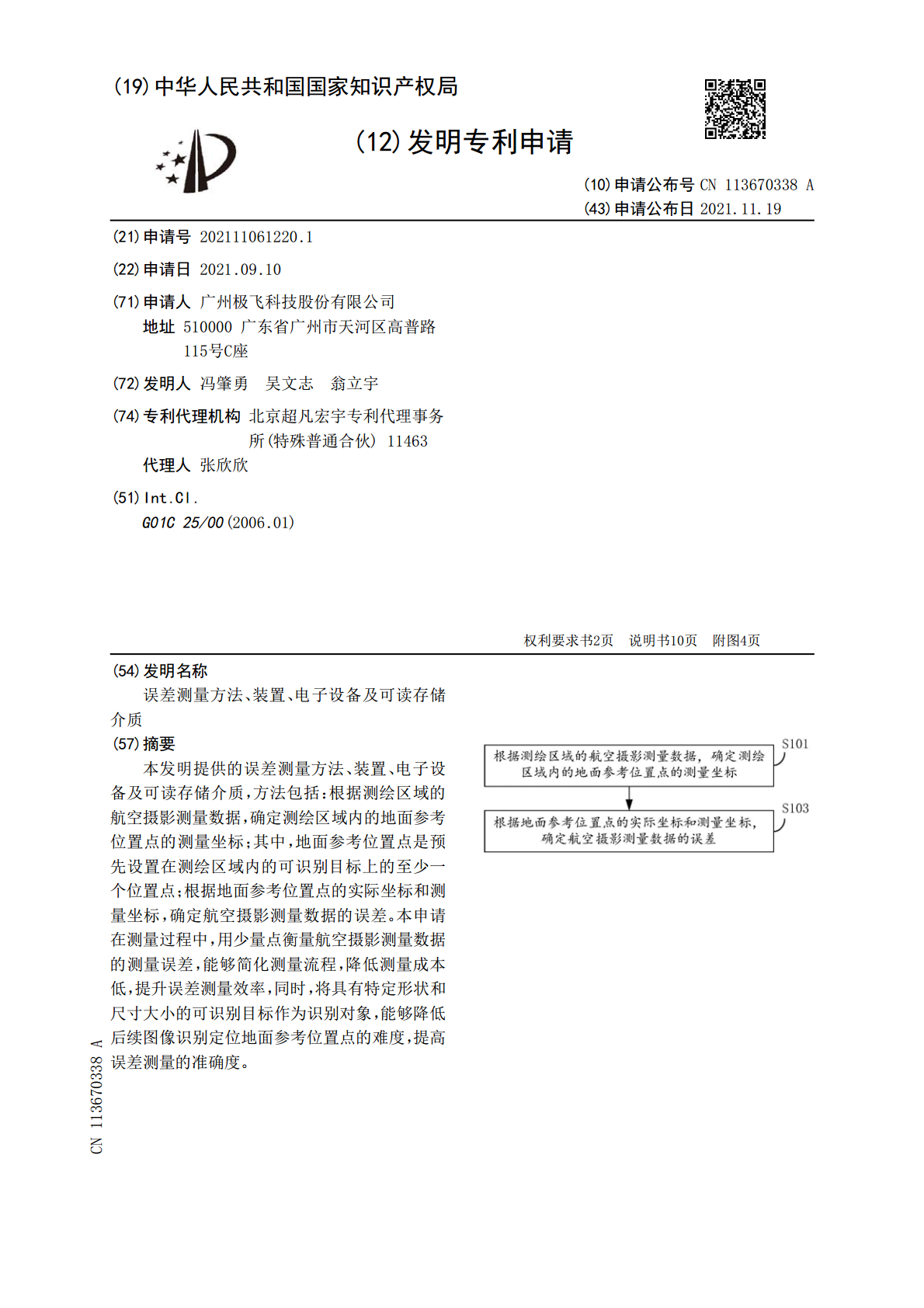
本发明提供的误差测量方法、装置、电子设备及可读存储介质,方法包括:根据测绘区域的航空摄影测量数据,确定测绘区域内的地面参考位置点的测量坐标;其中,地面参考位置点是预先设置在测绘区域内的可识别目标上的至少一个位置点;根据地面参考位置点的实际坐标和测量坐标,确定航空摄影测量数据的误差。本申请在测量过程中,用少量点衡量航空摄影测量数据的测量误差,能够简化测量流程,降低测量成本低,提升误差测量效率,同时,将具有特定形状和尺寸大小的可识别目标作为识别对象,能够降低后续图像识别定位地面参考位置点的难度,提高误差测量的

测量方法、装置、设备及可读存储介质.pdf
本申请实施例提供一种定位参考信号测量的方法、装置、设备及可读存储介质,该方法包括:终端发送第一信息,所述第一信息用于请求和/或终止第一配置;所述第一配置包括以下一项或多项:激活DLBWP改变;周期、半持续或非周期MG配置;其中,所述第一配置由DCI或者MAC?CE激活或者去激活。
数据存储方法、装置、电子设备及可读存储介质.pdf
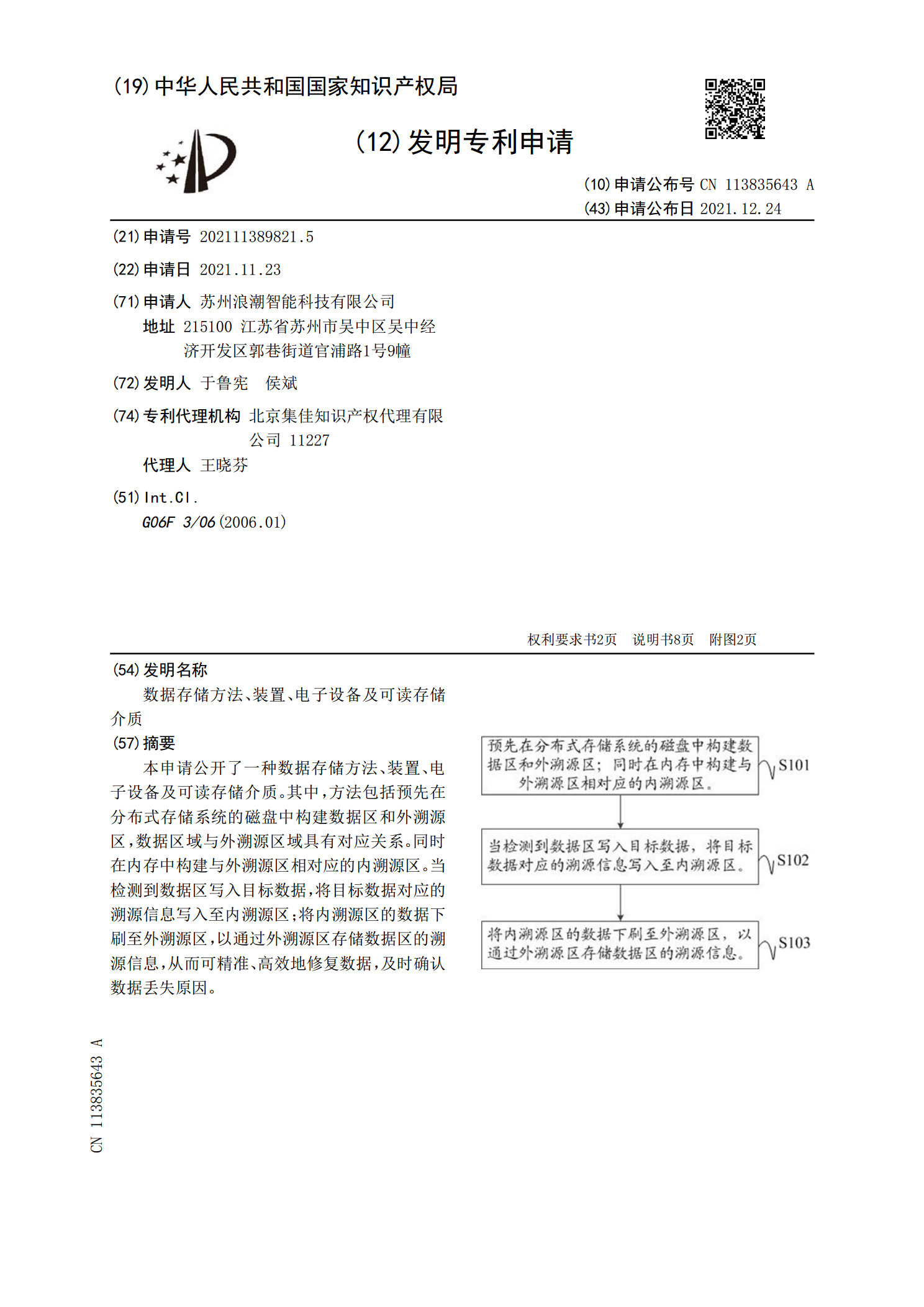
本申请公开了一种数据存储方法、装置、电子设备及可读存储介质。其中,方法包括预先在分布式存储系统的磁盘中构建数据区和外溯源区,数据区域与外溯源区域具有对应关系。同时在内存中构建与外溯源区相对应的内溯源区。当检测到数据区写入目标数据,将目标数据对应的溯源信息写入至内溯源区;将内溯源区的数据下刷至外溯源区,以通过外溯源区存储数据区的溯源信息,从而可精准、高效地修复数据,及时确认数据丢失原因。

壳料测量方法和装置、电子设备、计算机可读存储介质.pdf
本申请涉及一种壳料测量方法和装置、电子设备、计算机可读存储介质。所述方法包括:获取对壳料进行线扫描后得到的轨迹,轨迹用于记录壳料中各个采样点对应的截面轮廓,确定采样点对应的截面轮廓的定点位置,根据定点位置获取采样点对应的测量区域,根据测量区域中的截面轮廓得到采样点的测量结果。上述方法中,可以根据采样点对应的截面轮廓确定采样点的测量区域,从而根据测量区域中的截面轮廓得到采样点的测量结果,可以提高壳料的测量效率。

渲染方法、装置、电子设备及可读存储介质.pdf
本申请公开了一种渲染方法、装置、电子设备及可读存储介质,其方法包括:接收根据真实地形生成的地形假体,并生成所述地形假体的材质和贴图,其中,所述地形假体为静态网格;根据目标虚拟人物在待渲染场景中的位置信息,将所述待渲染场景分割为近景地形和远景地形;根据所述近景地形对应的真实地形,生成关卡简模;将所述关卡简模与所述地形假体融合,实现对所述待渲染场景的渲染。本申请在保障远景效果、地形效果的前提下,实现了使用更少的内存,降低IO的频率,达到效果和性能开销的平衡;对于玩家来说,针对玩家不同的移动设备性能,在保证比较