
多无人机均衡路径规划方法及装置.pdf

英哲****公主

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
多无人机均衡路径规划方法及装置.pdf
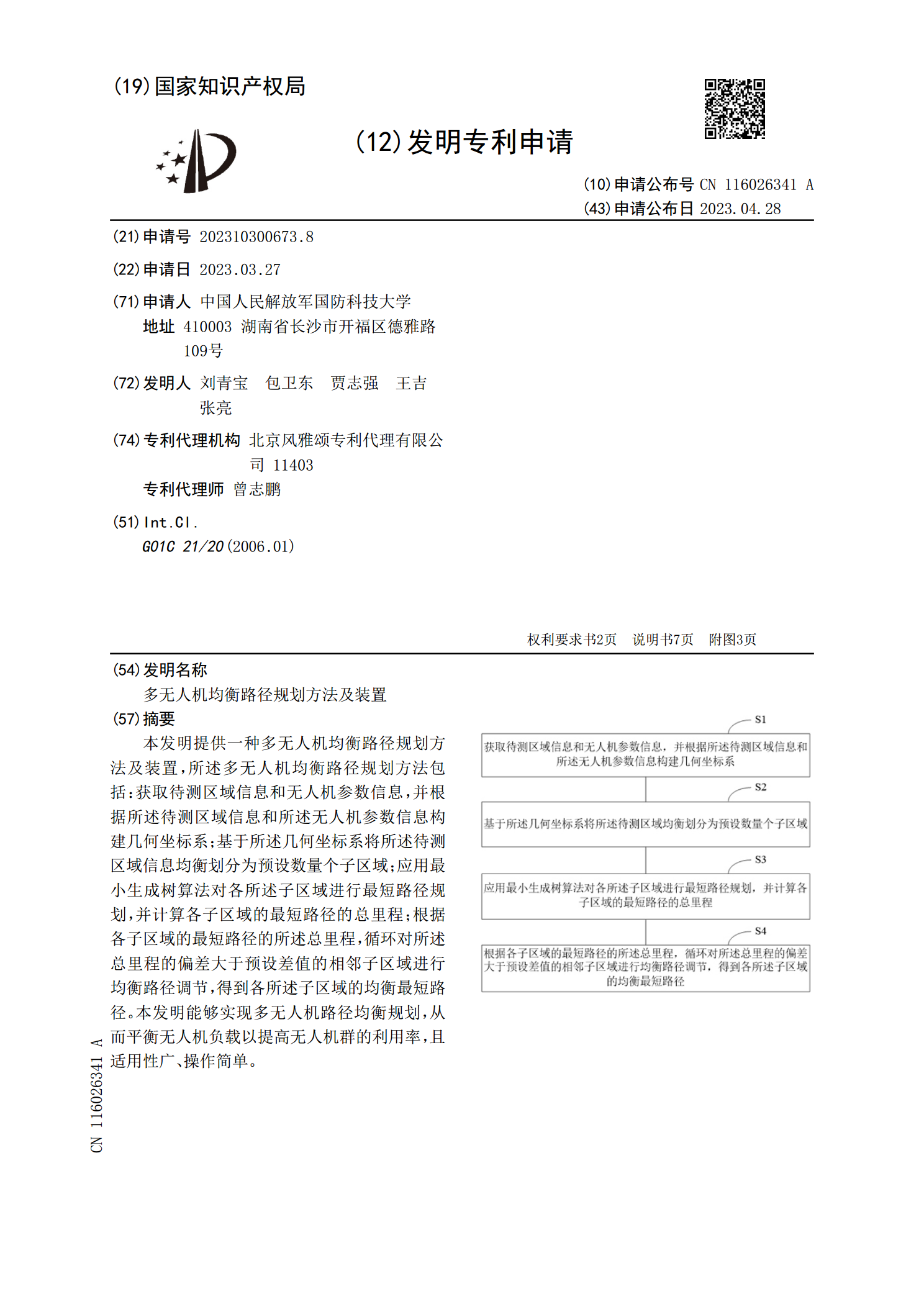
(19)国家知识产权局(12)发明专利申请(10)申请公布号CN116026341A(43)申请公布日2023.04.28(21)申请号202310300673.8(22)申请日2023.03.27(71)申请人中国人民解放军国防科技大学地址410003湖南省长沙市开福区德雅路109号(72)发明人刘青宝包卫东贾志强王吉张亮(74)专利代理机构北京风雅颂专利代理有限公司11403专利代理师曾志鹏(51)Int.Cl.G01C21/20(2006.01)权利要求书2页说明书7页附图3页(54)发明名称多无人
车辆与多无人机协同路径规划方法、装置、终端及介质.pdf
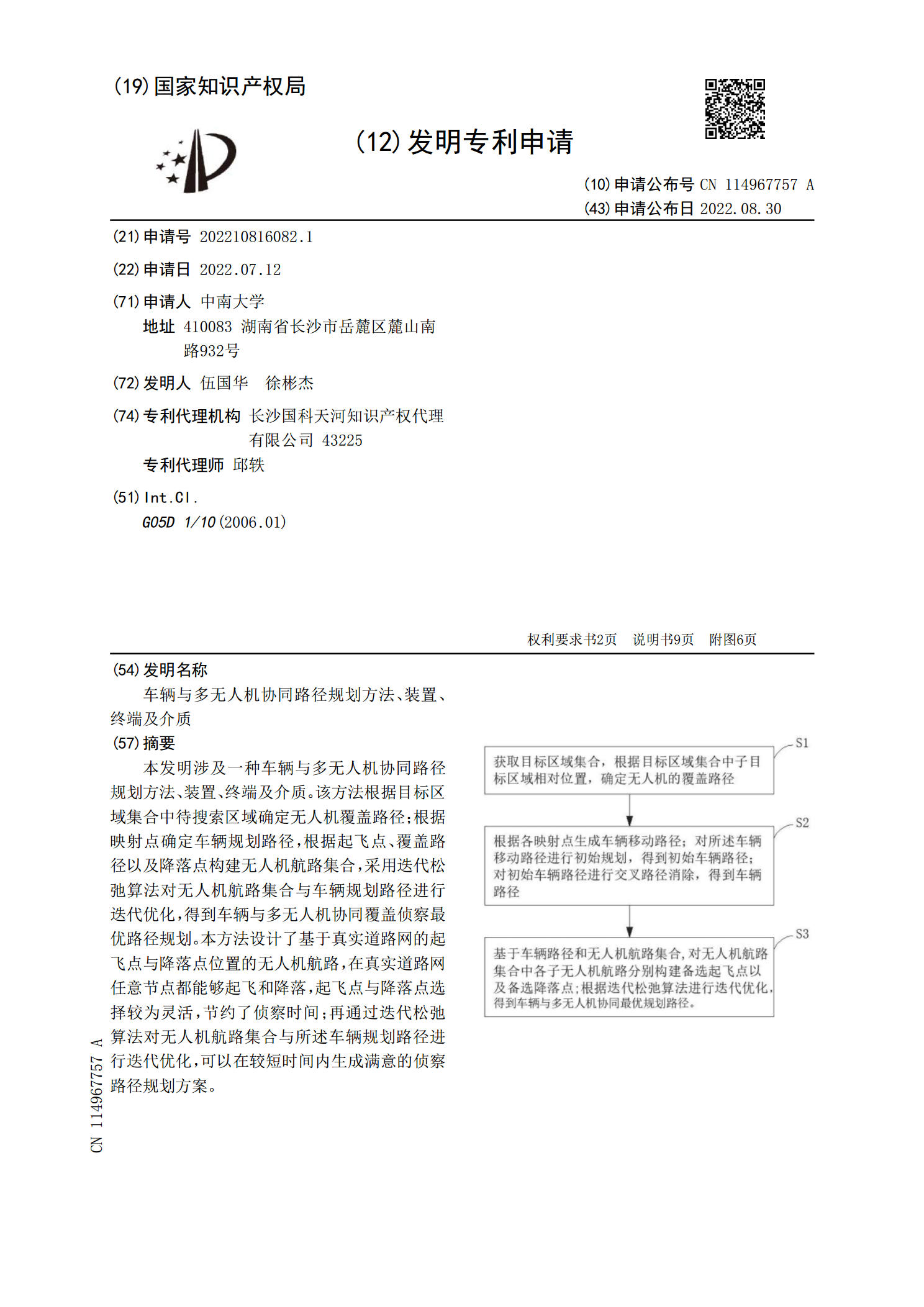
本发明涉及一种车辆与多无人机协同路径规划方法、装置、终端及介质。该方法根据目标区域集合中待搜索区域确定无人机覆盖路径;根据映射点确定车辆规划路径,根据起飞点、覆盖路径以及降落点构建无人机航路集合,采用迭代松弛算法对无人机航路集合与车辆规划路径进行迭代优化,得到车辆与多无人机协同覆盖侦察最优路径规划。本方法设计了基于真实道路网的起飞点与降落点位置的无人机航路,在真实道路网任意节点都能够起飞和降落,起飞点与降落点选择较为灵活,节约了侦察时间;再通过迭代松弛算法对无人机航路集合与所述车辆规划路径进行迭代优化,可

一种多无人机覆盖任务路径规划方法及装置.pdf
本发明涉及一种多无人机覆盖任务路径规划方法及装置,首先,基于各无人机的任务完成时间以及无人机最新分配的任务覆盖区域与所有标记为未被任务覆盖的区域之间的均衡有效任务比值确定各无人机所分配的区域列集,能够更加有效地进行区域分配,达到为无人机均衡分配任务的目的;其次,使用蚁群算法对无人机航线方向进行重规划,达到降低飞行消耗的目的;最后,在一次规划完成后,比较任务完成时间最大和最小的无人机的时间,若时间相差较大,则说明区域场景中存在超大区域,需对最大区域进行预留划分,迭代执行覆盖规划方案,达到均衡无人机任务时间的
多无人机轨迹规划方法、装置、无人机及存储介质.pdf
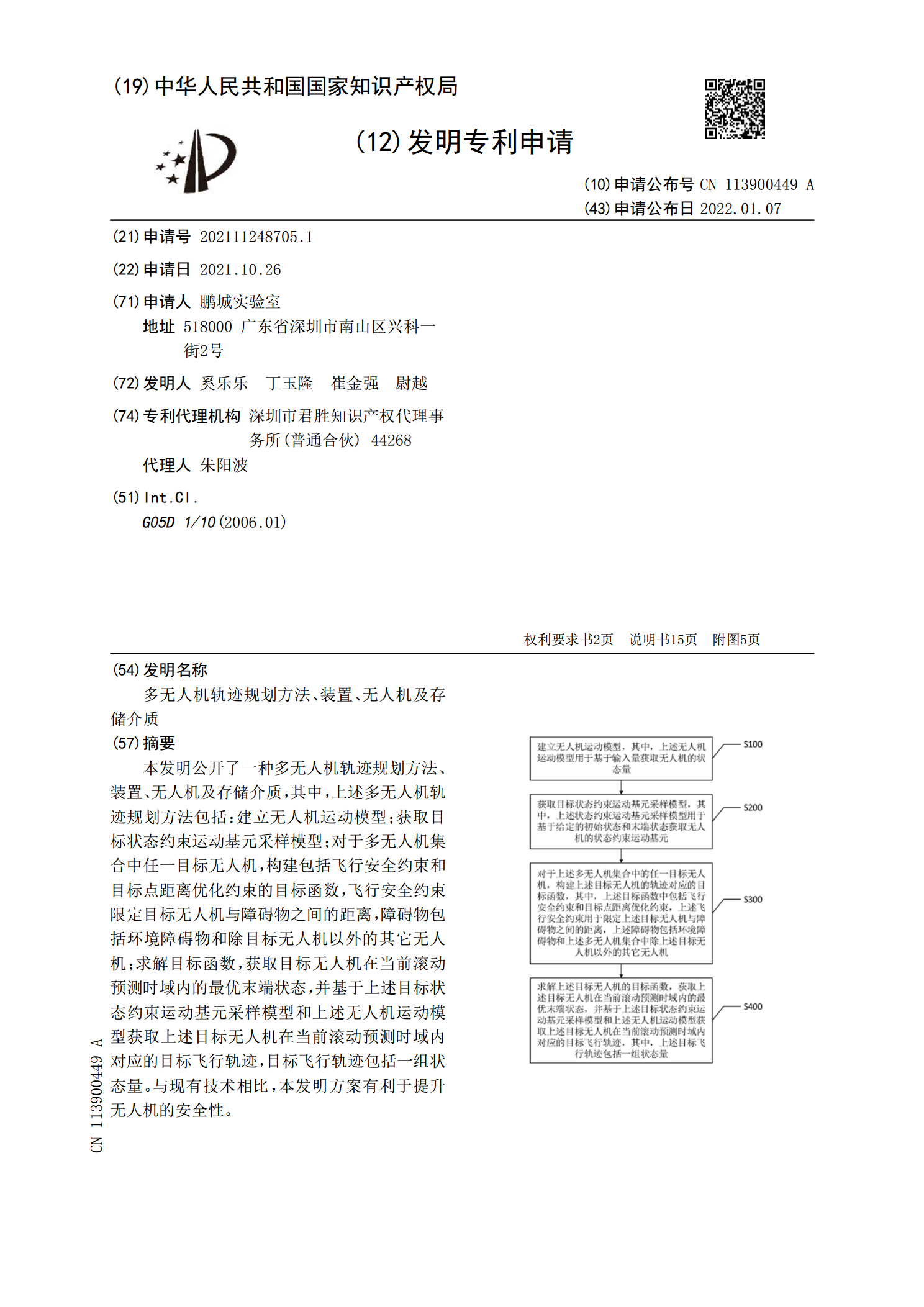
本发明公开了一种多无人机轨迹规划方法、装置、无人机及存储介质,其中,上述多无人机轨迹规划方法包括:建立无人机运动模型;获取目标状态约束运动基元采样模型;对于多无人机集合中任一目标无人机,构建包括飞行安全约束和目标点距离优化约束的目标函数,飞行安全约束限定目标无人机与障碍物之间的距离,障碍物包括环境障碍物和除目标无人机以外的其它无人机;求解目标函数,获取目标无人机在当前滚动预测时域内的最优末端状态,并基于上述目标状态约束运动基元采样模型和上述无人机运动模型获取上述目标无人机在当前滚动预测时域内对应的目标飞行

多无人机协同侦察路径规划研究.docx
多无人机协同侦察路径规划研究随着无人机技术的不断发展,无人机在军事、航空、医疗、物流等领域中得到了广泛的应用。其中,无人机侦察是目前无人机应用领域中的一个热点。无人机侦察在实际应用中,需要多架无人机协同侦察同一区域,以获取更加全面、准确的图像信息。在这种情况下,无人机的协同侦察路径规划就成为了一个关键问题,本文主要探讨了多无人机协同侦察路径规划的研究。一、多无人机协同侦察路径规划的研究意义多无人机协同侦察路径规划的研究具有以下意义:(1)提高侦察效率多无人机协同侦察能够实现对目标区域的快速覆盖,有效地提高