
一种车载雷达的外参标定方法、装置及存储介质.pdf

森林****io

1/10
2/10
3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车载雷达的外参标定方法、装置及存储介质.pdf
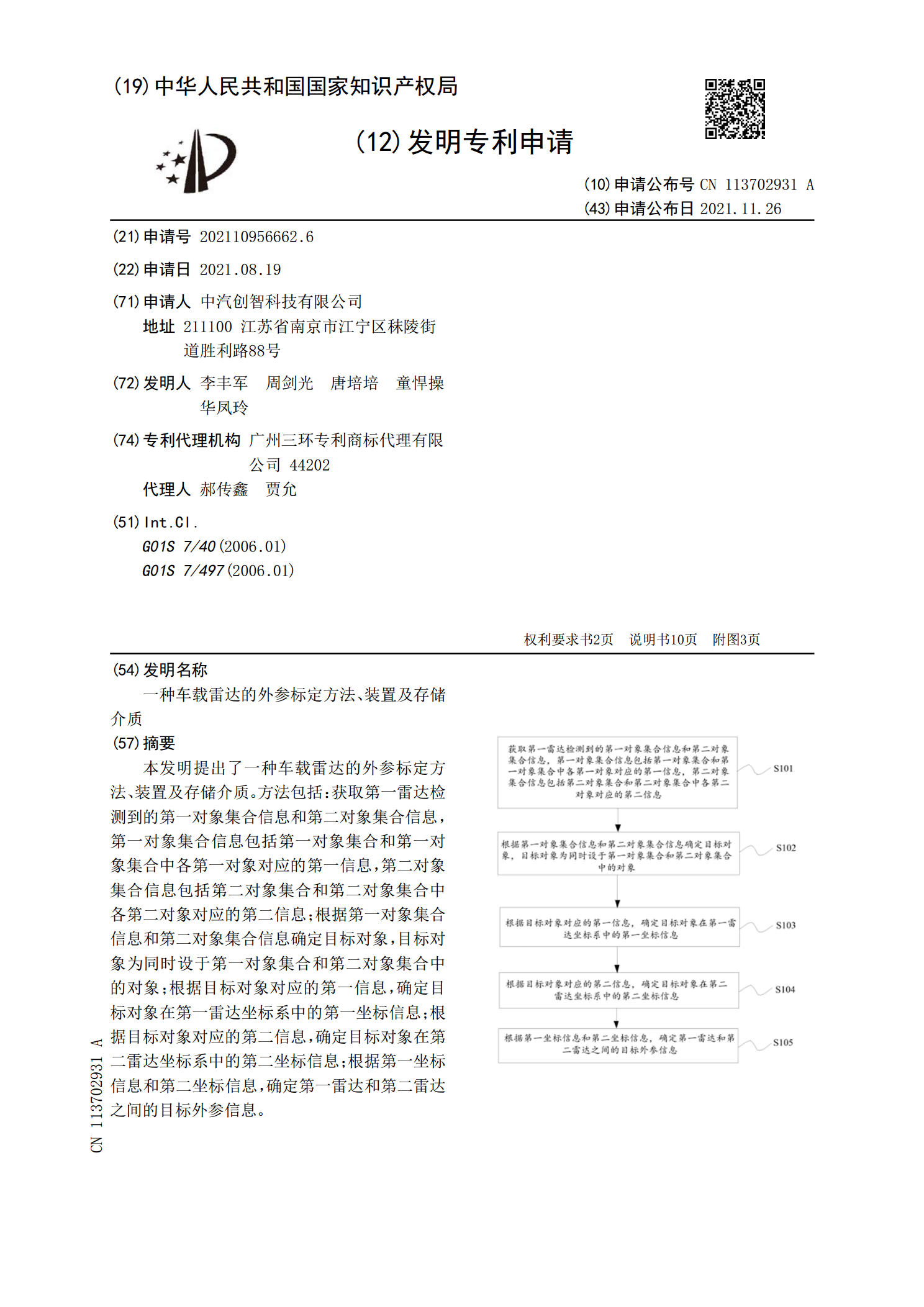
本发明提出了一种车载雷达的外参标定方法、装置及存储介质。方法包括:获取第一雷达检测到的第一对象集合信息和第二对象集合信息,第一对象集合信息包括第一对象集合和第一对象集合中各第一对象对应的第一信息,第二对象集合信息包括第二对象集合和第二对象集合中各第二对象对应的第二信息;根据第一对象集合信息和第二对象集合信息确定目标对象,目标对象为同时设于第一对象集合和第二对象集合中的对象;根据目标对象对应的第一信息,确定目标对象在第一雷达坐标系中的第一坐标信息;根据目标对象对应的第二信息,确定目标对象在第二雷达坐标系中的
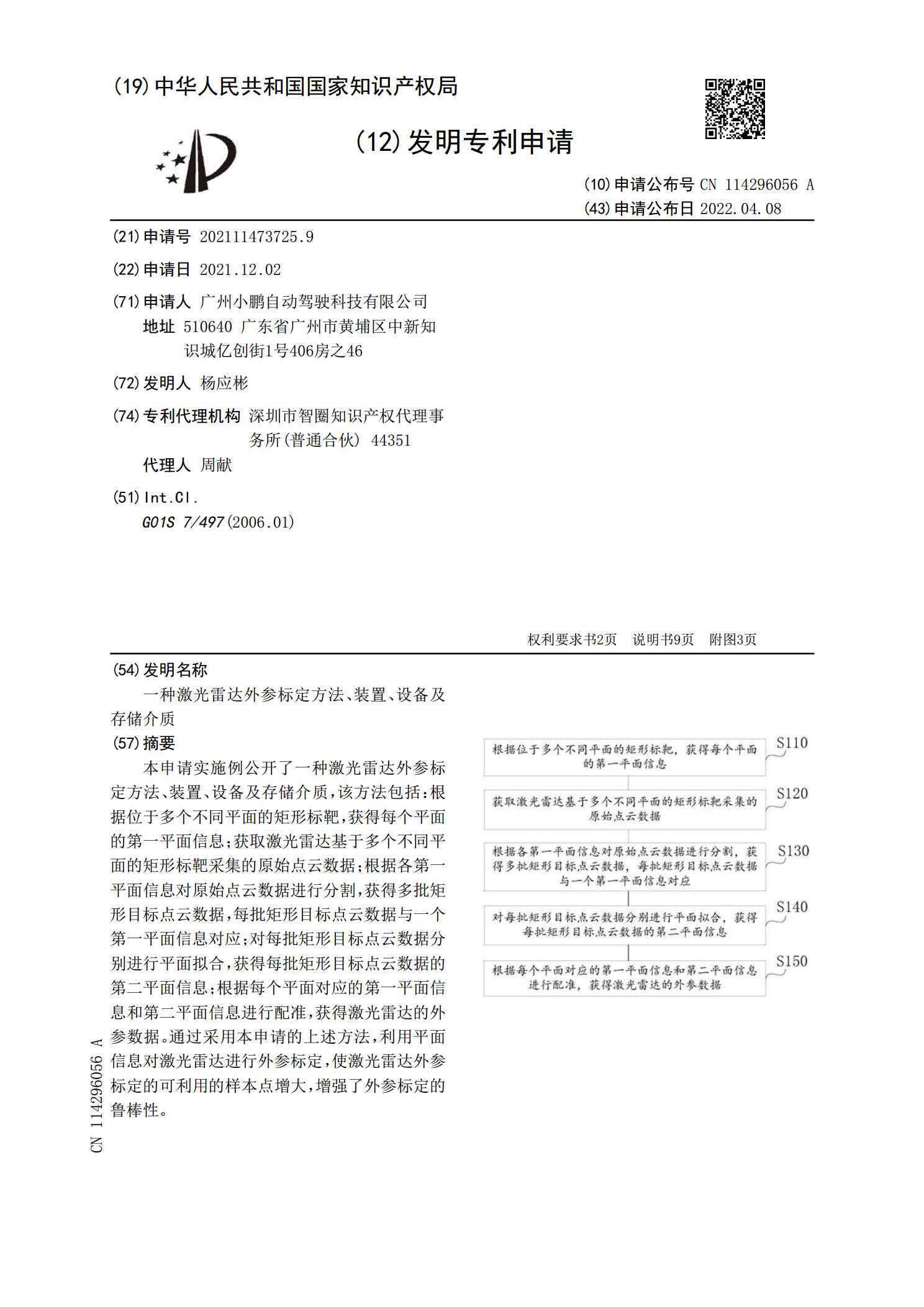
一种激光雷达外参标定方法、装置、设备及存储介质.pdf
本申请实施例公开了一种激光雷达外参标定方法、装置、设备及存储介质,该方法包括:根据位于多个不同平面的矩形标靶,获得每个平面的第一平面信息;获取激光雷达基于多个不同平面的矩形标靶采集的原始点云数据;根据各第一平面信息对原始点云数据进行分割,获得多批矩形目标点云数据,每批矩形目标点云数据与一个第一平面信息对应;对每批矩形目标点云数据分别进行平面拟合,获得每批矩形目标点云数据的第二平面信息;根据每个平面对应的第一平面信息和第二平面信息进行配准,获得激光雷达的外参数据。通过采用本申请的上述方法,利用平面信息对激光
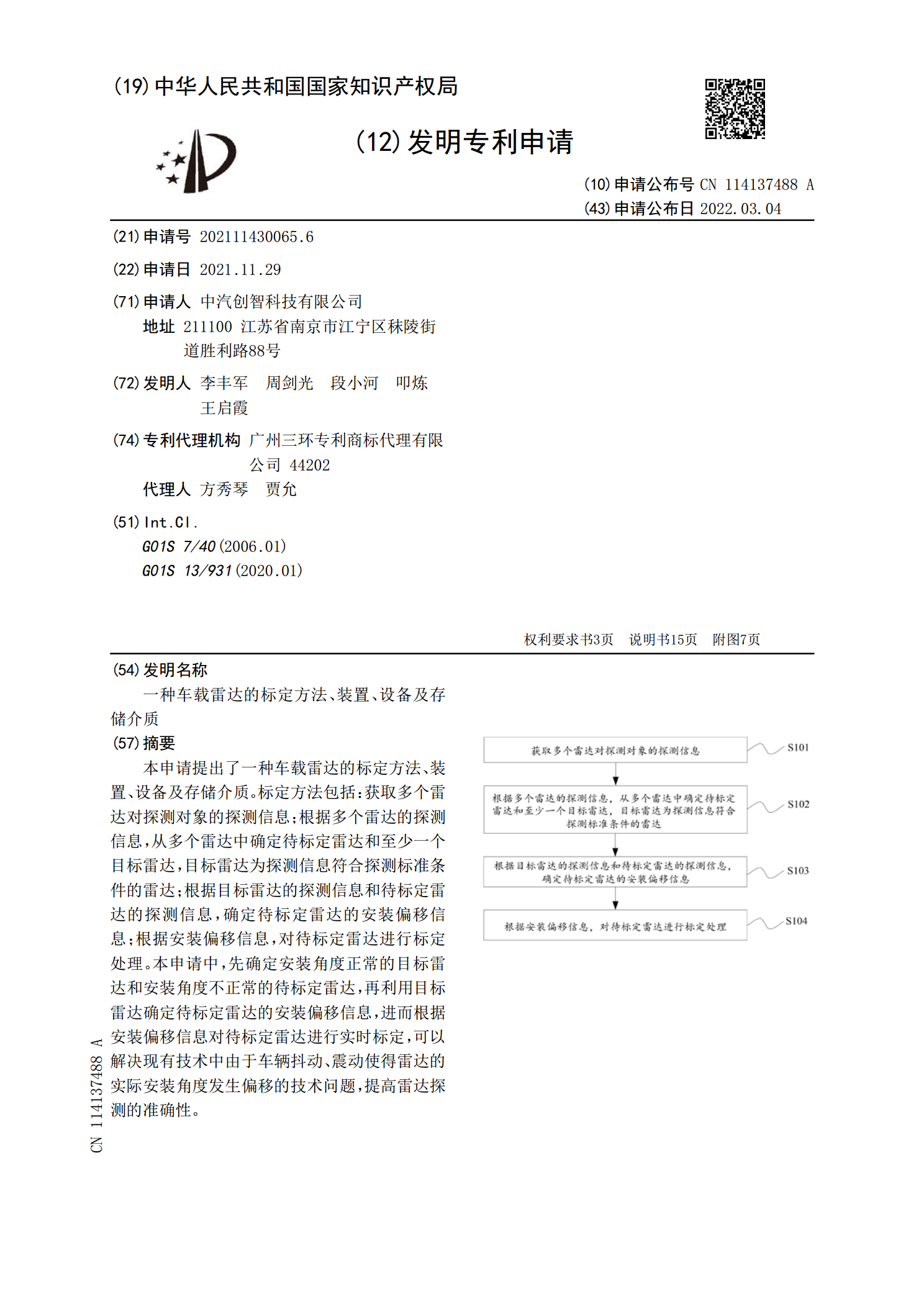
一种车载雷达的标定方法、装置、设备及存储介质.pdf
本申请提出了一种车载雷达的标定方法、装置、设备及存储介质。标定方法包括:获取多个雷达对探测对象的探测信息;根据多个雷达的探测信息,从多个雷达中确定待标定雷达和至少一个目标雷达,目标雷达为探测信息符合探测标准条件的雷达;根据目标雷达的探测信息和待标定雷达的探测信息,确定待标定雷达的安装偏移信息;根据安装偏移信息,对待标定雷达进行标定处理。本申请中,先确定安装角度正常的目标雷达和安装角度不正常的待标定雷达,再利用目标雷达确定待标定雷达的安装偏移信息,进而根据安装偏移信息对待标定雷达进行实时标定,可以解决现有技
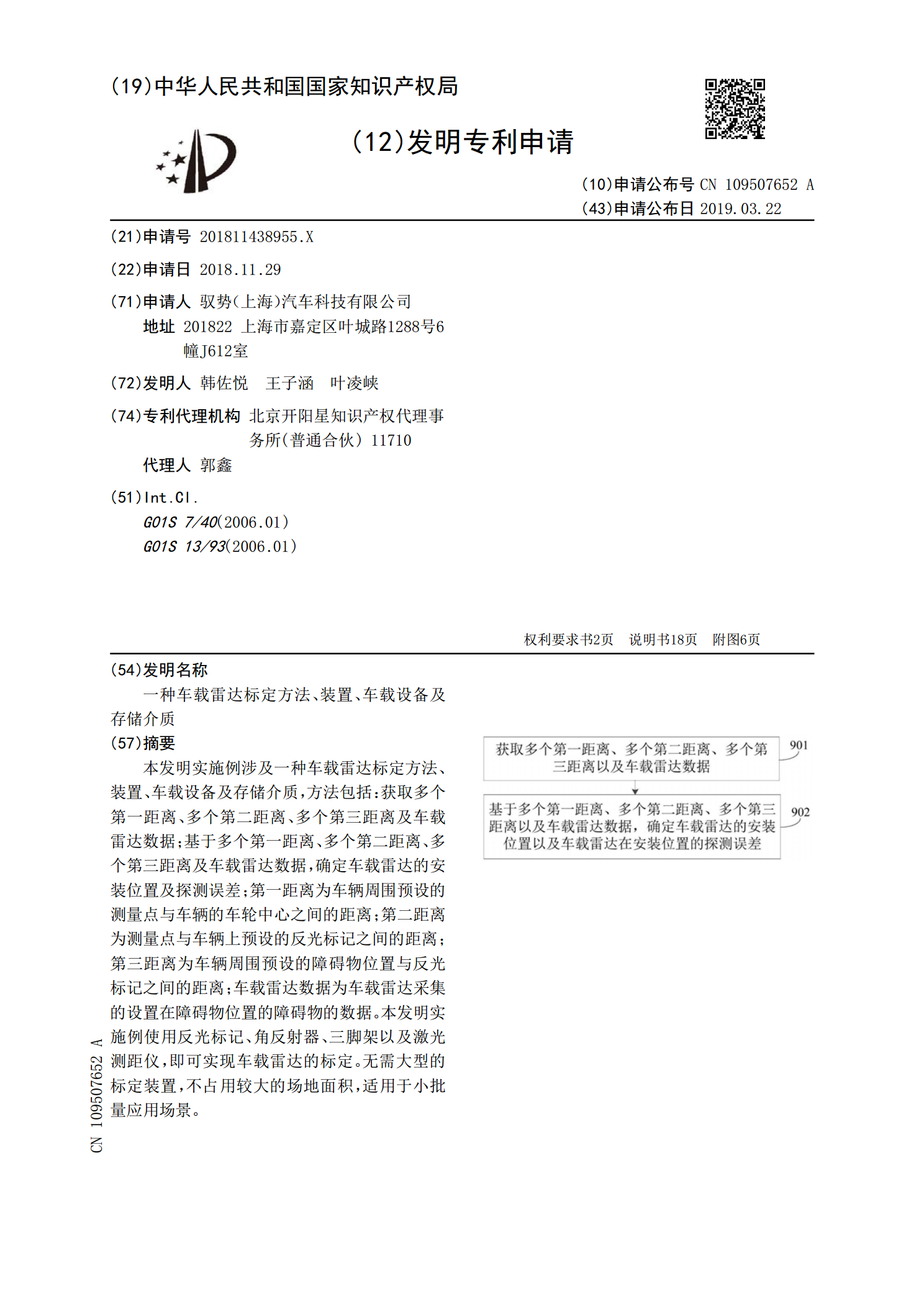
一种车载雷达标定方法、装置、车载设备及存储介质.pdf
本发明实施例涉及一种车载雷达标定方法、装置、车载设备及存储介质,方法包括:获取多个第一距离、多个第二距离、多个第三距离及车载雷达数据;基于多个第一距离、多个第二距离、多个第三距离及车载雷达数据,确定车载雷达的安装位置及探测误差;第一距离为车辆周围预设的测量点与车辆的车轮中心之间的距离;第二距离为测量点与车辆上预设的反光标记之间的距离;第三距离为车辆周围预设的障碍物位置与反光标记之间的距离;车载雷达数据为车载雷达采集的设置在障碍物位置的障碍物的数据。本发明实施例使用反光标记、角反射器、三脚架以及激光测距仪,
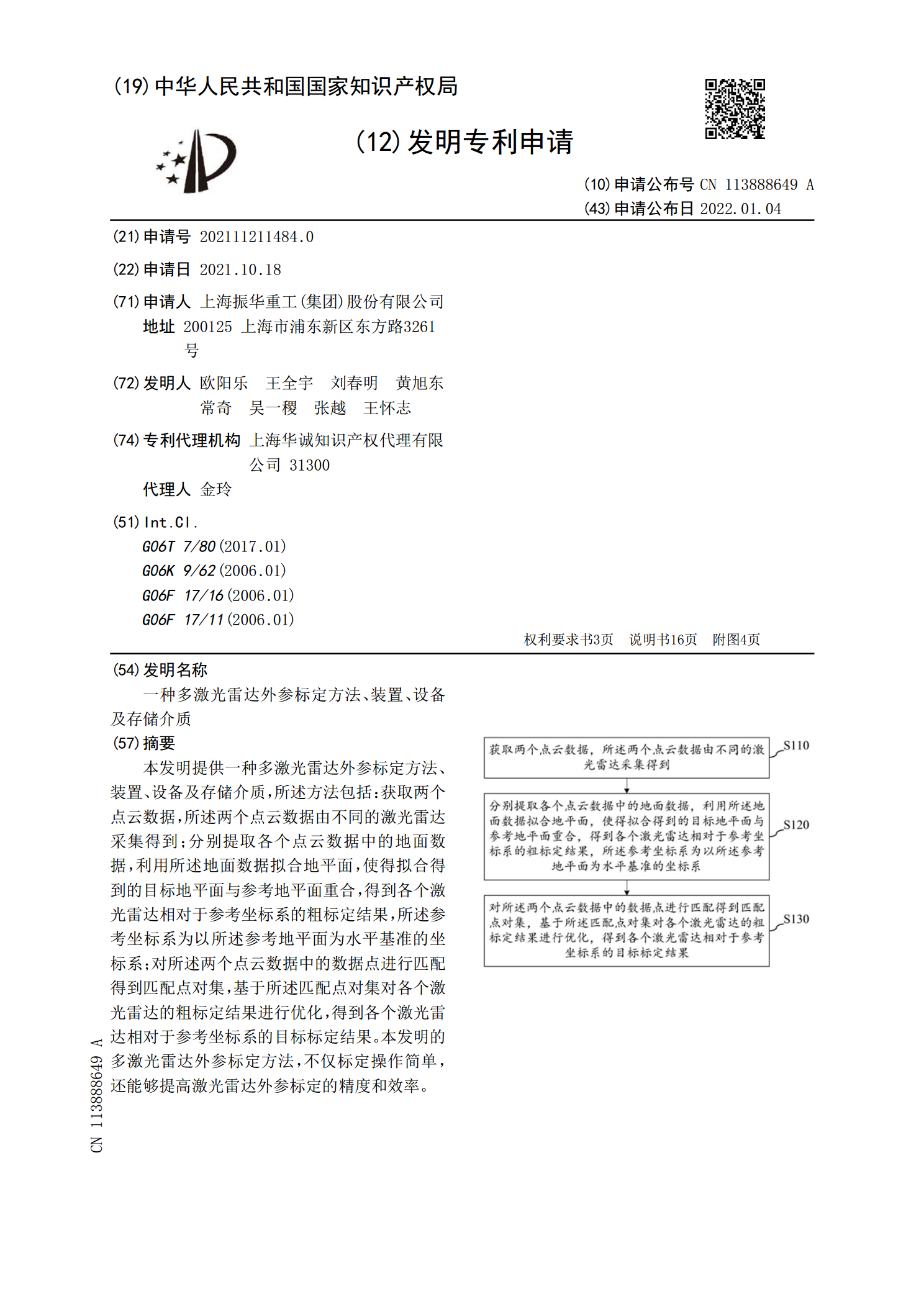
一种多激光雷达外参标定方法、装置、设备及存储介质.pdf
本发明提供一种多激光雷达外参标定方法、装置、设备及存储介质,所述方法包括:获取两个点云数据,所述两个点云数据由不同的激光雷达采集得到;分别提取各个点云数据中的地面数据,利用所述地面数据拟合地平面,使得拟合得到的目标地平面与参考地平面重合,得到各个激光雷达相对于参考坐标系的粗标定结果,所述参考坐标系为以所述参考地平面为水平基准的坐标系;对所述两个点云数据中的数据点进行匹配得到匹配点对集,基于所述匹配点对集对各个激光雷达的粗标定结果进行优化,得到各个激光雷达相对于参考坐标系的目标标定结果。本发明的多激光雷达外