
一种用于智能驾驶的测试方法、装置、系统及存储介质.pdf

小新****ou


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种用于智能驾驶的测试方法、装置、系统及存储介质.pdf
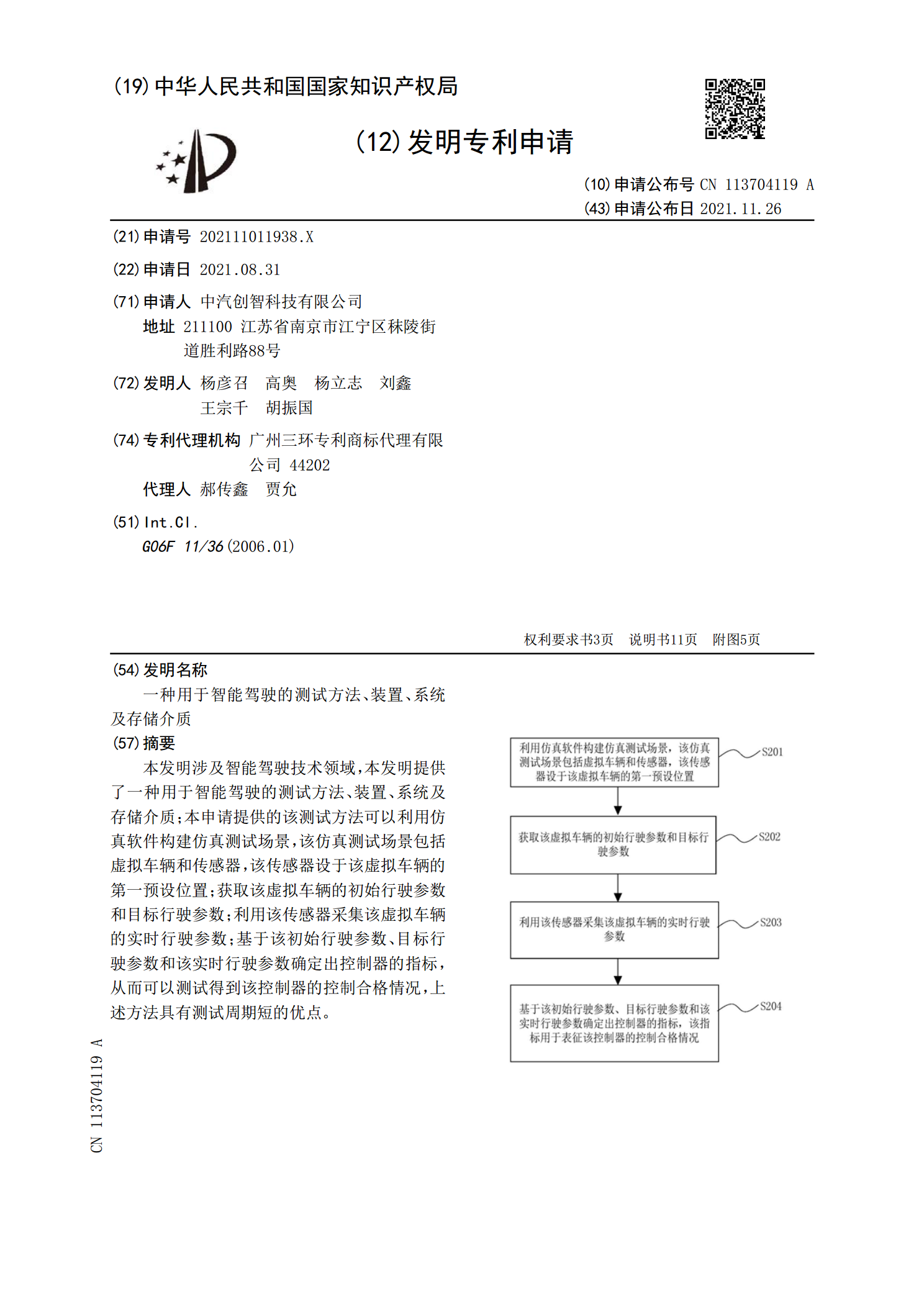
本发明涉及智能驾驶技术领域,本发明提供了一种用于智能驾驶的测试方法、装置、系统及存储介质;本申请提供的该测试方法可以利用仿真软件构建仿真测试场景,该仿真测试场景包括虚拟车辆和传感器,该传感器设于该虚拟车辆的第一预设位置;获取该虚拟车辆的初始行驶参数和目标行驶参数;利用该传感器采集该虚拟车辆的实时行驶参数;基于该初始行驶参数、目标行驶参数和该实时行驶参数确定出控制器的指标,从而可以测试得到该控制器的控制合格情况,上述方法具有测试周期短的优点。
一种用于控制智能门的方法、系统、装置和存储介质.pdf
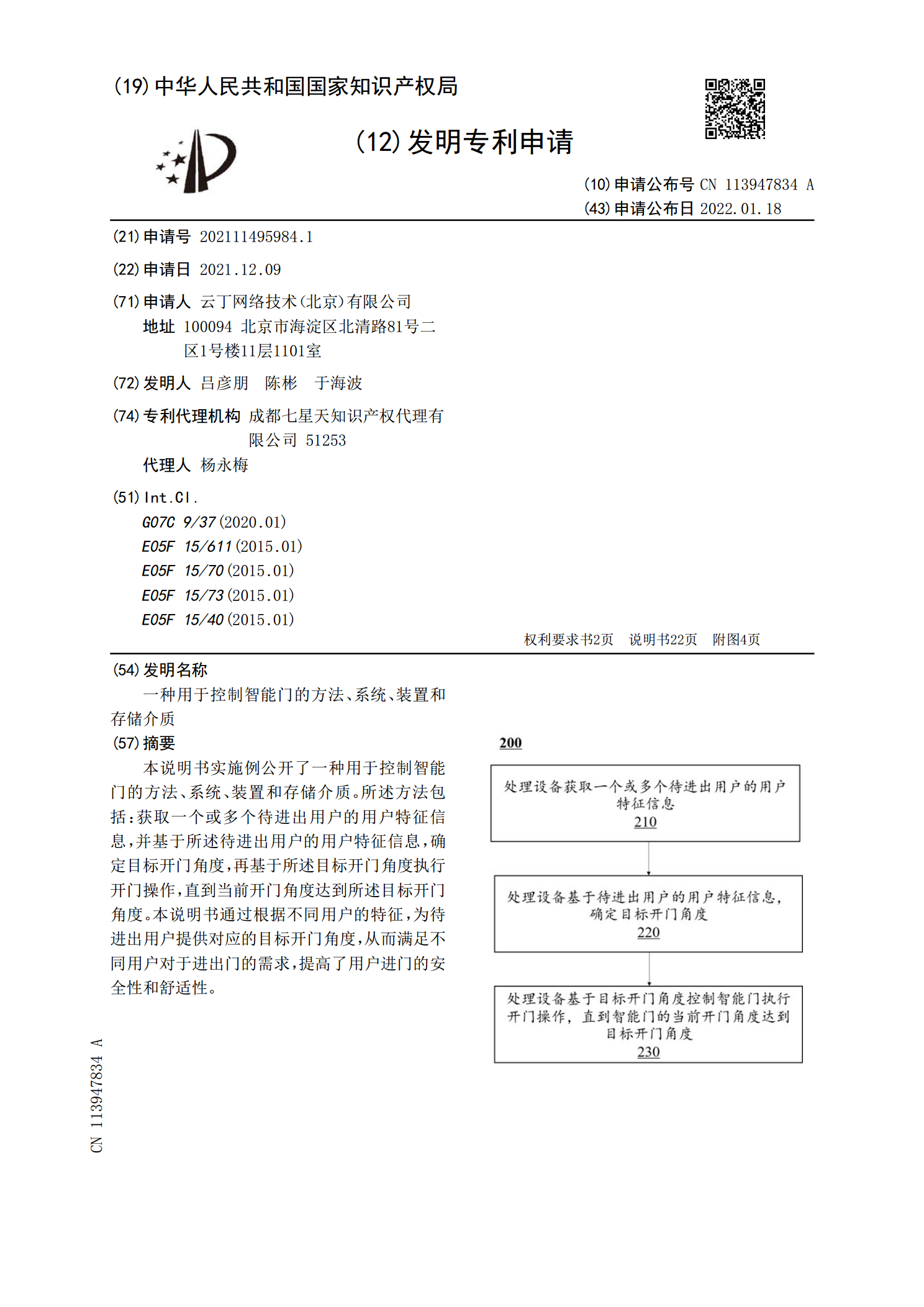
本说明书实施例公开了一种用于控制智能门的方法、系统、装置和存储介质。所述方法包括:获取一个或多个待进出用户的用户特征信息,并基于所述待进出用户的用户特征信息,确定目标开门角度,再基于所述目标开门角度执行开门操作,直到当前开门角度达到所述目标开门角度。本说明书通过根据不同用户的特征,为待进出用户提供对应的目标开门角度,从而满足不同用户对于进出门的需求,提高了用户进门的安全性和舒适性。
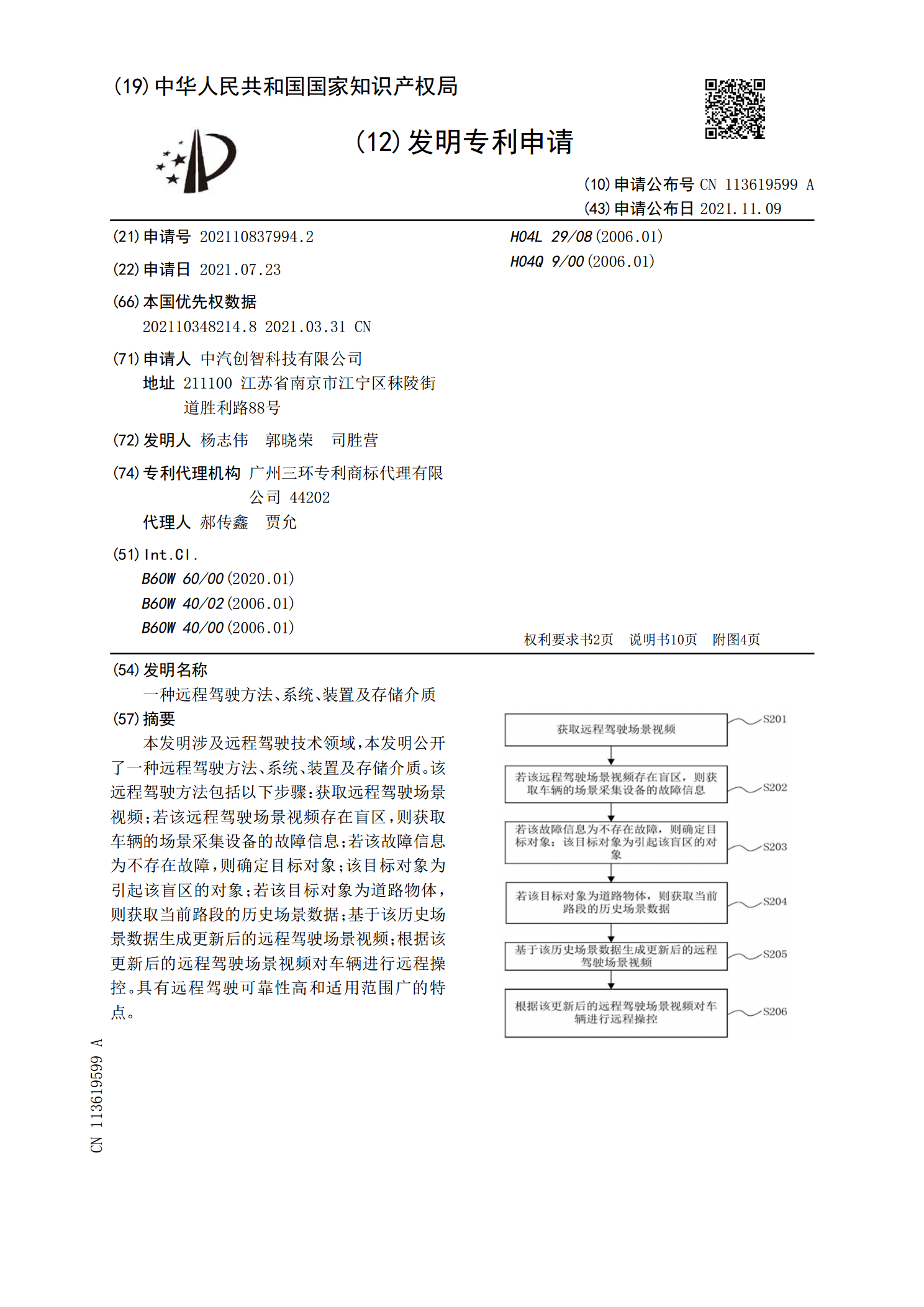
一种远程驾驶方法、系统、装置及存储介质.pdf
本发明涉及远程驾驶技术领域,本发明公开了一种远程驾驶方法、系统、装置及存储介质。该远程驾驶方法包括以下步骤:获取远程驾驶场景视频;若该远程驾驶场景视频存在盲区,则获取车辆的场景采集设备的故障信息;若该故障信息为不存在故障,则确定目标对象;该目标对象为引起该盲区的对象;若该目标对象为道路物体,则获取当前路段的历史场景数据;基于该历史场景数据生成更新后的远程驾驶场景视频;根据该更新后的远程驾驶场景视频对车辆进行远程操控。具有远程驾驶可靠性高和适用范围广的特点。

驾驶引导方法、装置、系统及存储介质.pdf
本申请提供一种驾驶引导方法、装置、系统及存储介质,涉及交通管理技术领域,该方法包括:接收路障的定位信息,所述定位信息由所述路障上设置的移动定位装置获取;将所述定位信息发送至道路监控系统,以在所述道路监控系统中根据所述定位信息获取所述路障的定位位置处的图像数据;将所述图像数据转换为富媒体信息,并将所述富媒体信息发送至目标终端,以引导车辆行驶。能够解决目前存在道路封道情形下对驾驶员提示不及时的问题。
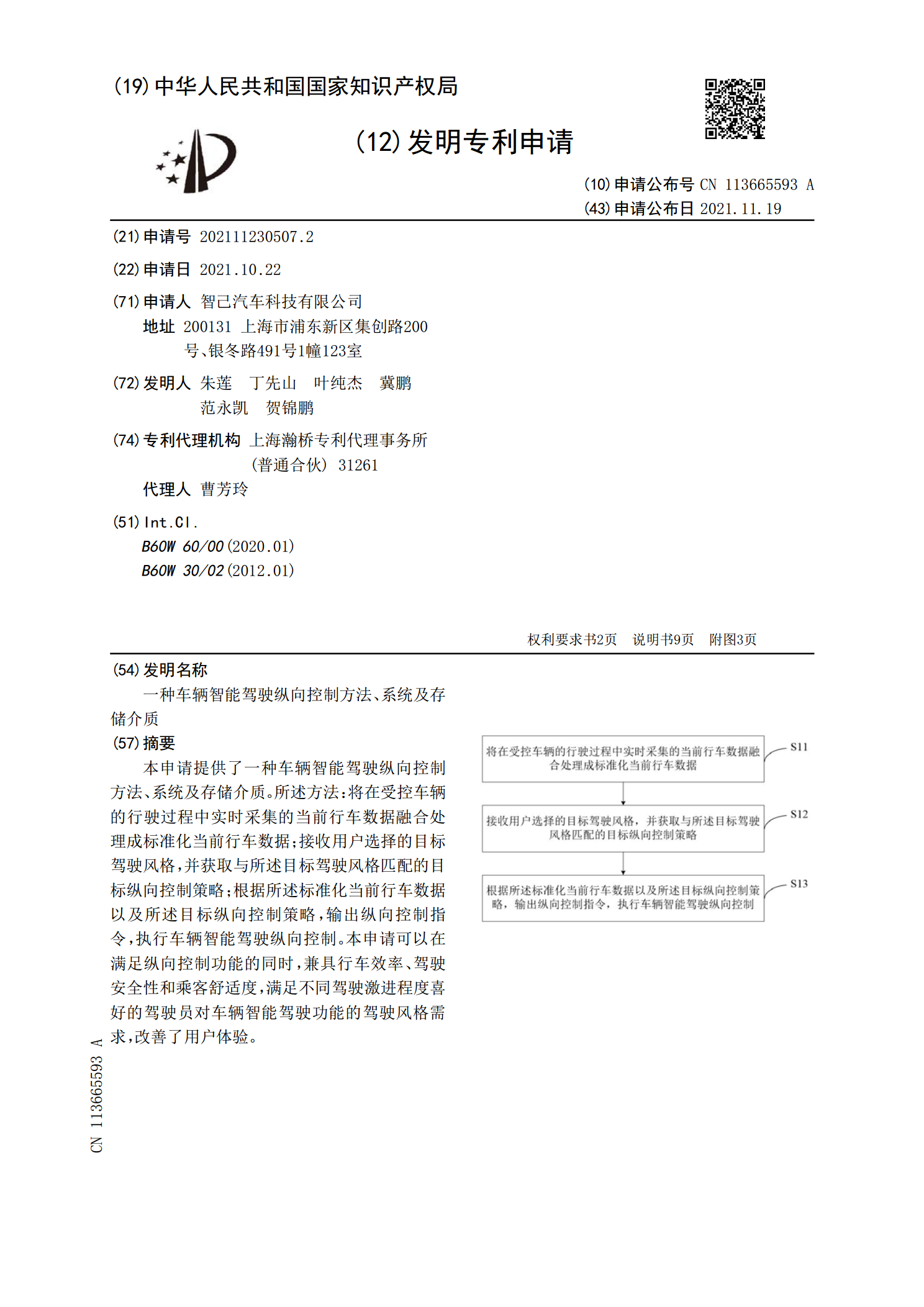
一种车辆智能驾驶纵向控制方法、系统及存储介质.pdf
本申请提供了一种车辆智能驾驶纵向控制方法、系统及存储介质。所述方法:将在受控车辆的行驶过程中实时采集的当前行车数据融合处理成标准化当前行车数据;接收用户选择的目标驾驶风格,并获取与所述目标驾驶风格匹配的目标纵向控制策略;根据所述标准化当前行车数据以及所述目标纵向控制策略,输出纵向控制指令,执行车辆智能驾驶纵向控制。本申请可以在满足纵向控制功能的同时,兼具行车效率、驾驶安全性和乘客舒适度,满足不同驾驶激进程度喜好的驾驶员对车辆智能驾驶功能的驾驶风格需求,改善了用户体验。