
确定目标物体状态的方法、装置、电子设备以及存储介质.pdf

羽沫****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
确定目标物体状态的方法、装置、电子设备以及存储介质.pdf
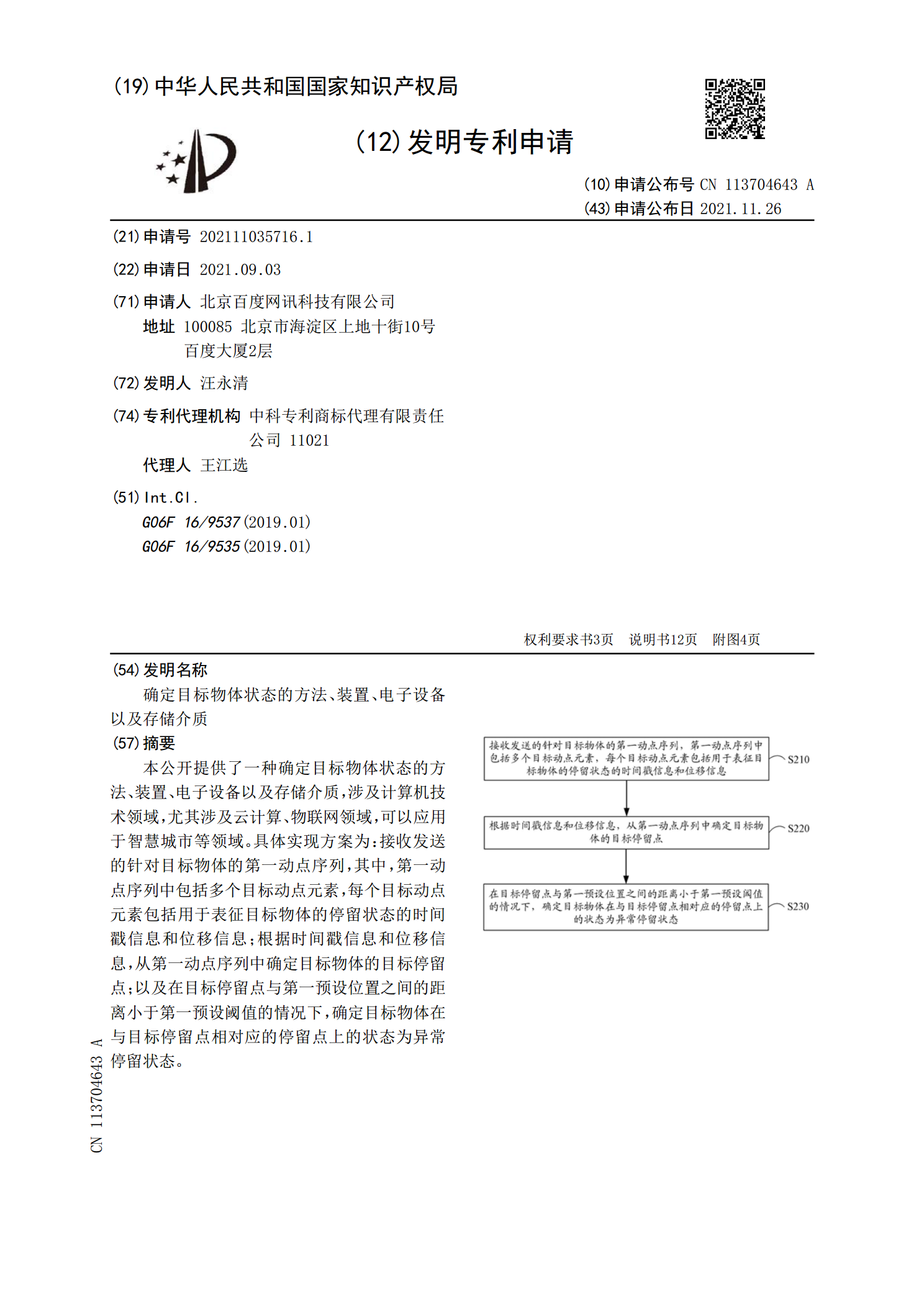
本公开提供了一种确定目标物体状态的方法、装置、电子设备以及存储介质,涉及计算机技术领域,尤其涉及云计算、物联网领域,可以应用于智慧城市等领域。具体实现方案为:接收发送的针对目标物体的第一动点序列,其中,第一动点序列中包括多个目标动点元素,每个目标动点元素包括用于表征目标物体的停留状态的时间戳信息和位移信息;根据时间戳信息和位移信息,从第一动点序列中确定目标物体的目标停留点;以及在目标停留点与第一预设位置之间的距离小于第一预设阈值的情况下,确定目标物体在与目标停留点相对应的停留点上的状态为异常停留状态。
对象状态确定方法、装置、电子设备以及存储介质.pdf
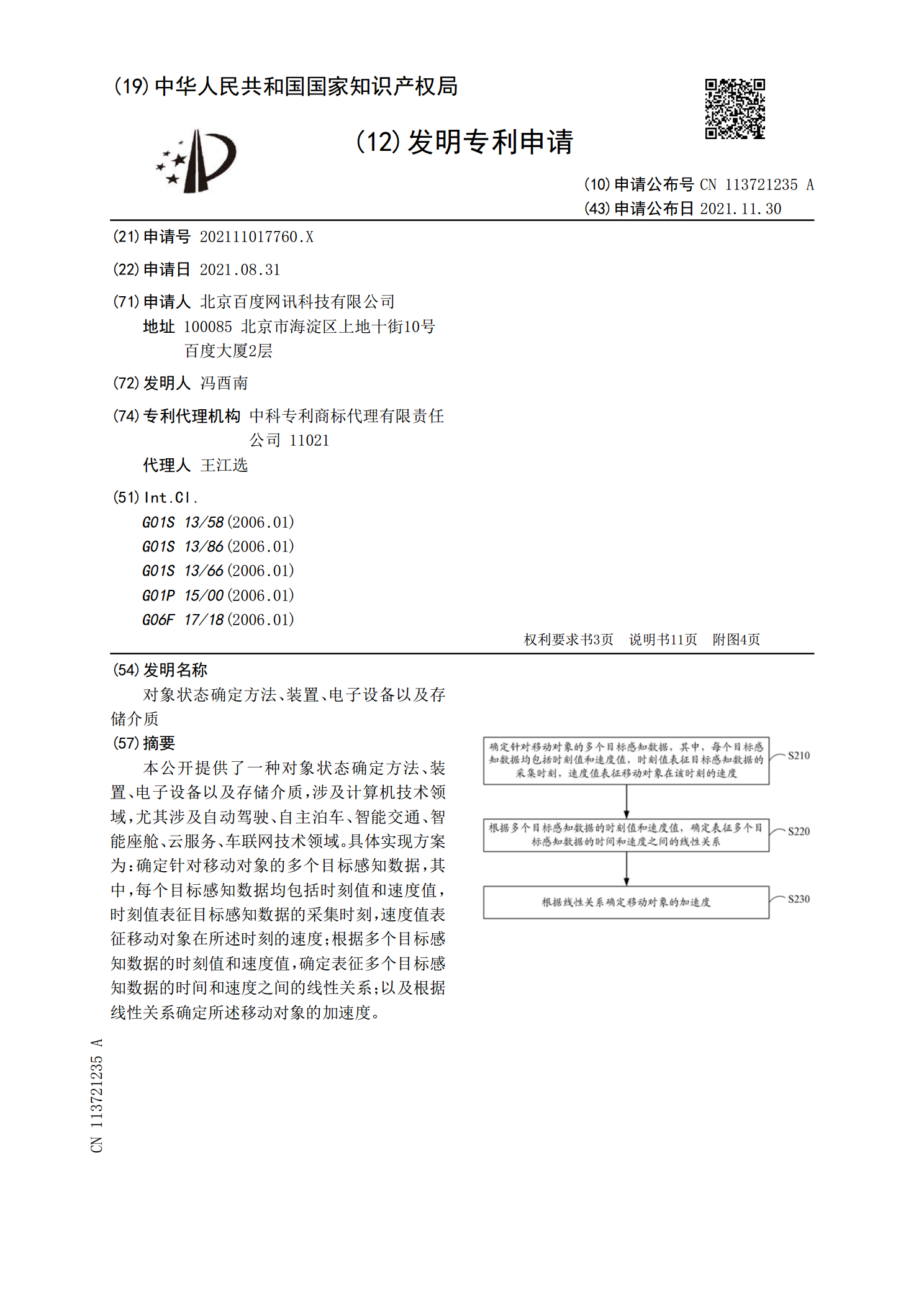
本公开提供了一种对象状态确定方法、装置、电子设备以及存储介质,涉及计算机技术领域,尤其涉及自动驾驶、自主泊车、智能交通、智能座舱、云服务、车联网技术领域。具体实现方案为:确定针对移动对象的多个目标感知数据,其中,每个目标感知数据均包括时刻值和速度值,时刻值表征目标感知数据的采集时刻,速度值表征移动对象在所述时刻的速度;根据多个目标感知数据的时刻值和速度值,确定表征多个目标感知数据的时间和速度之间的线性关系;以及根据线性关系确定所述移动对象的加速度。
目标位置确定方法、装置、电子设备以及存储介质.pdf
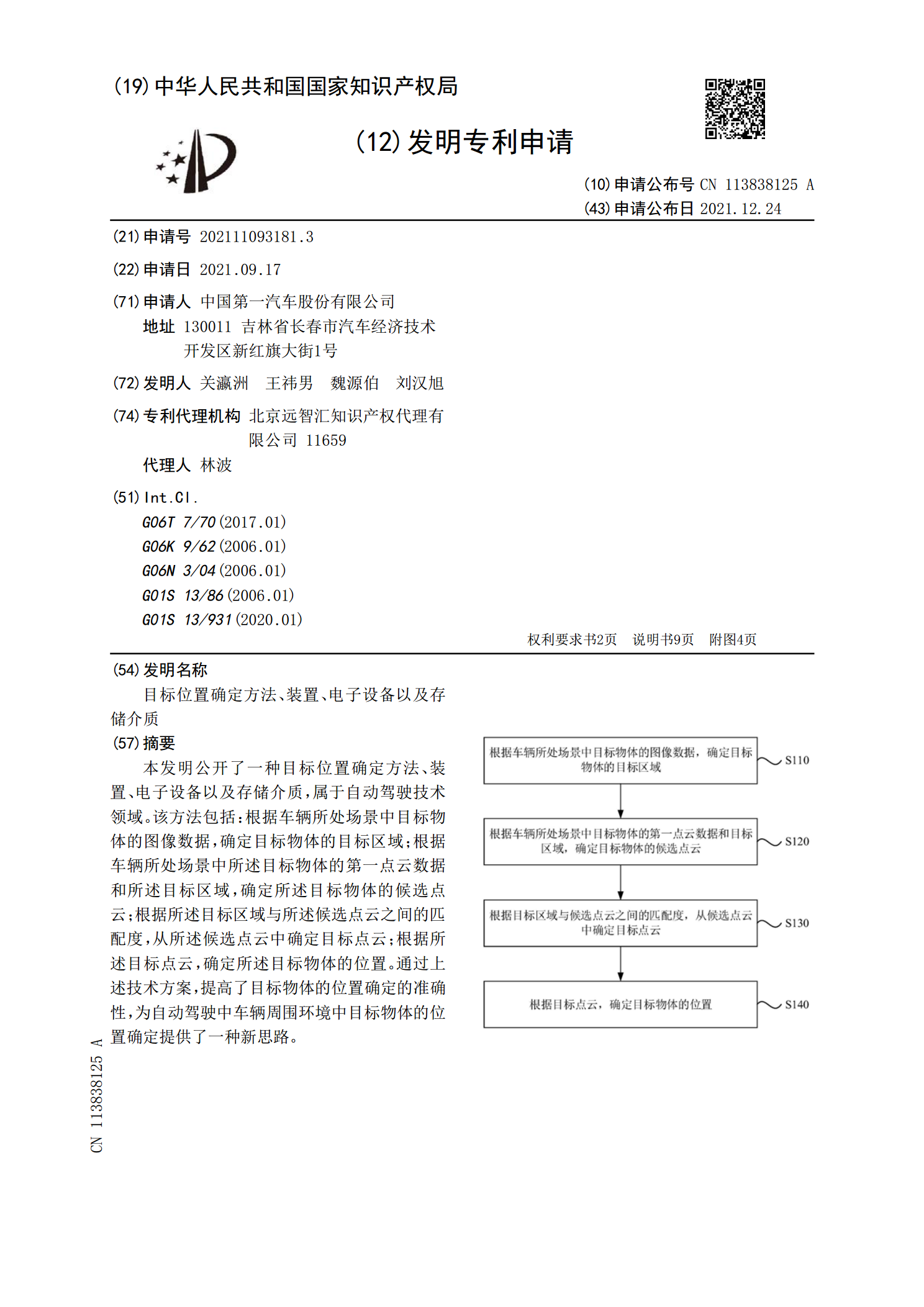
本发明公开了一种目标位置确定方法、装置、电子设备以及存储介质,属于自动驾驶技术领域。该方法包括:根据车辆所处场景中目标物体的图像数据,确定目标物体的目标区域;根据车辆所处场景中所述目标物体的第一点云数据和所述目标区域,确定所述目标物体的候选点云;根据所述目标区域与所述候选点云之间的匹配度,从所述候选点云中确定目标点云;根据所述目标点云,确定所述目标物体的位置。通过上述技术方案,提高了目标物体的位置确定的准确性,为自动驾驶中车辆周围环境中目标物体的位置确定提供了一种新思路。
确定方法、装置、电子设备以及存储介质.pdf
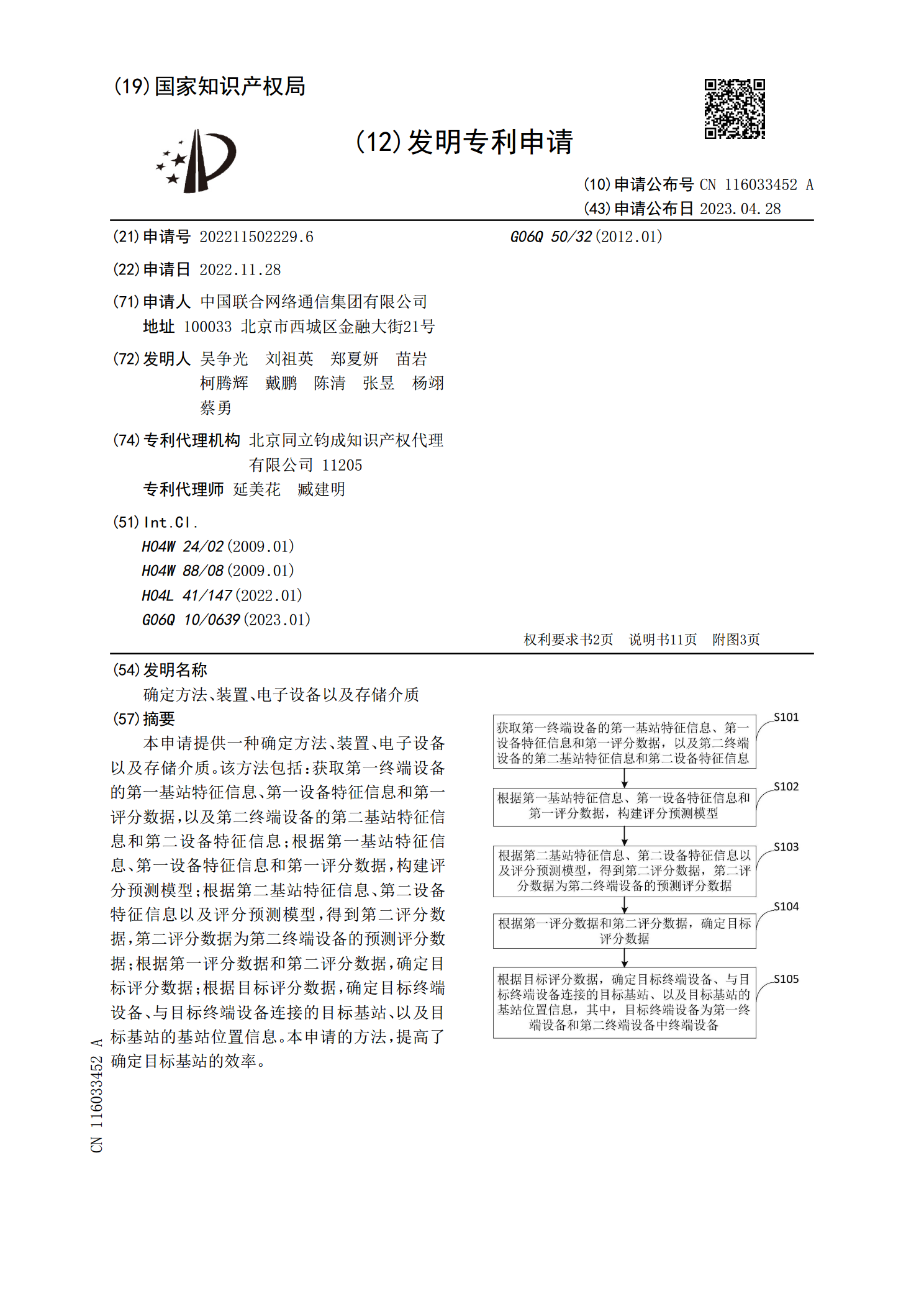
本申请提供一种确定方法、装置、电子设备以及存储介质。该方法包括:获取第一终端设备的第一基站特征信息、第一设备特征信息和第一评分数据,以及第二终端设备的第二基站特征信息和第二设备特征信息;根据第一基站特征信息、第一设备特征信息和第一评分数据,构建评分预测模型;根据第二基站特征信息、第二设备特征信息以及评分预测模型,得到第二评分数据,第二评分数据为第二终端设备的预测评分数据;根据第一评分数据和第二评分数据,确定目标评分数据;根据目标评分数据,确定目标终端设备、与目标终端设备连接的目标基站、以及目标基站的基站位
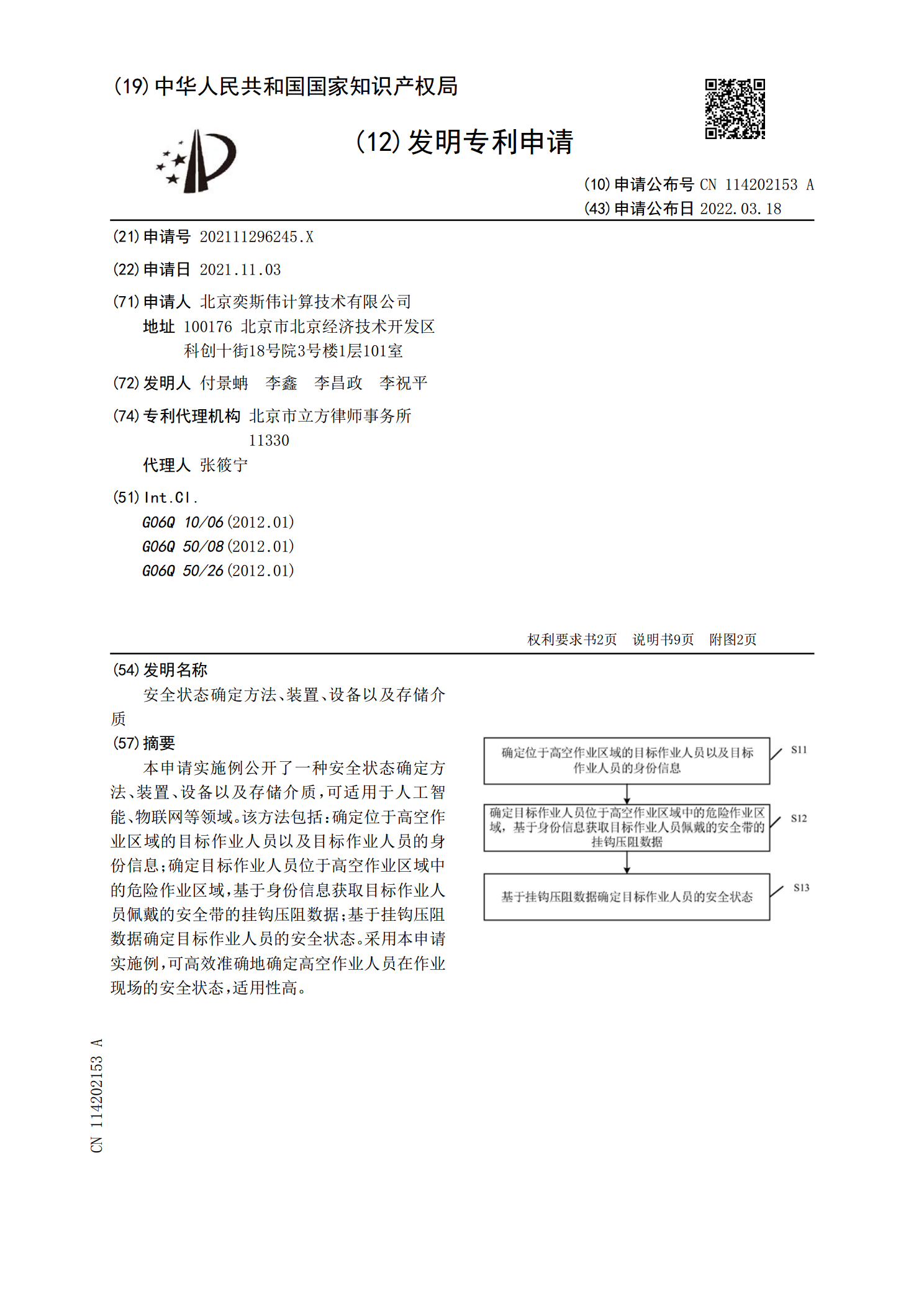
安全状态确定方法、装置、设备以及存储介质.pdf
本申请实施例公开了一种安全状态确定方法、装置、设备以及存储介质,可适用于人工智能、物联网等领域。该方法包括:确定位于高空作业区域的目标作业人员以及目标作业人员的身份信息;确定目标作业人员位于高空作业区域中的危险作业区域,基于身份信息获取目标作业人员佩戴的安全带的挂钩压阻数据;基于挂钩压阻数据确定目标作业人员的安全状态。采用本申请实施例,可高效准确地确定高空作业人员在作业现场的安全状态,适用性高。